说说M451例程讲解之LED
/**************************************************************************//**
* @file main.c
* @version V3.00
* $Revision: 3 $
* $Date: 15/09/02 10:03a $
* @brief Demonstrate how to set GPIO pin mode and use pin data input/output control.
演示如何设置GPIO引脚模式并使用引脚数据输入/输出控制。
* @note
* Copyright (C) 2013~2015 Nuvoton Technology Corp. All rights reserved.
*
******************************************************************************/
#include "stdio.h"
#include "M451Series.h"
#include "NuEdu-Basic01.h" #define PLL_CLOCK 72000000 void SYS_Init(void)
{
/*---------------------------------------------------------------------------------------------------------*/
/* Init System Clock */
/*---------------------------------------------------------------------------------------------------------*/ /* Enable HIRC clock (Internal RC 22.1184MHz) */
CLK_EnableXtalRC(CLK_PWRCTL_HIRCEN_Msk); /* Wait for HIRC clock ready */
CLK_WaitClockReady(CLK_STATUS_HIRCSTB_Msk); /* Select HCLK clock source as HIRC and and HCLK clock divider as 1 */
CLK_SetHCLK(CLK_CLKSEL0_HCLKSEL_HIRC, CLK_CLKDIV0_HCLK()); /* Enable HXT clock (external XTAL 12MHz) */
CLK_EnableXtalRC(CLK_PWRCTL_HXTEN_Msk); /* Wait for HXT clock ready */
CLK_WaitClockReady(CLK_STATUS_HXTSTB_Msk); /* Set core clock as PLL_CLOCK from PLL */
CLK_SetCoreClock(PLL_CLOCK); /* Enable UART module clock */
CLK_EnableModuleClock(UART0_MODULE); /* Select UART module clock source as HXT and UART module clock divider as 1 */
CLK_SetModuleClock(UART0_MODULE, CLK_CLKSEL1_UARTSEL_HXT, CLK_CLKDIV0_UART()); /*---------------------------------------------------------------------------------------------------------*/
/* Init I/O Multi-function */
/*---------------------------------------------------------------------------------------------------------*/ /* Set PD multi-function pins for UART0 RXD(PD.6) and TXD(PD.1) */
SYS->GPD_MFPL &= ~(SYS_GPD_MFPL_PD6MFP_Msk | SYS_GPD_MFPL_PD1MFP_Msk);
SYS->GPD_MFPL |= (SYS_GPD_MFPL_PD6MFP_UART0_RXD | SYS_GPD_MFPL_PD1MFP_UART0_TXD); } void UART0_Init()
{
/*---------------------------------------------------------------------------------------------------------*/
/* Init UART */
/*---------------------------------------------------------------------------------------------------------*/
/* Reset UART module */
SYS_ResetModule(UART0_RST); /* Configure UART0 and set UART0 baud rate */
UART_Open(UART0, );
} /*---------------------------------------------------------------------------------------------------------*/
/* Main Function */
/*---------------------------------------------------------------------------------------------------------*/
int32_t main(void)
{
int i, j;
/* Unlock protected registers */
SYS_UnlockReg(); /* Init System, peripheral clock and multi-function I/O */
SYS_Init(); /* Lock protected registers */
SYS_LockReg(); /* Init UART0 for printf */
UART0_Init(); printf("\n\nCPU @ %dHz\n", SystemCoreClock); printf("LED test\n\r"); Initial_LED(); while()
{
for(i = ; i < ; i++)
{
Write_LED_Bar(i);
for(j = ; j < ; j++)
CLK_SysTickDelay();
}
有必要说说LED,正所谓每一个程序刚开始都要写“HELLO WORLD”,而单片机或嵌入式都要点亮小灯,万物从点灯开始,哈哈
它的结构很简单

LED,是一种能够将电能转化为可见光的固态的半导体器件,即发光二极管,它可以直接把电转化为光。LED的心脏是一个半导体的晶片,晶片的一端附在一个支架上,一端是负极,
另一端连接电源的正极,使整个晶片被环氧树脂封装起来。半导体晶片由两部分组成,一部分是P型半导体,在它里面空穴占主导地位,另一端是N型半导体,在这边主要是电子。
这两种半导体连接起来的时候,它们之间就形成一个P-N结。当电流通过导线作用于这个晶片的时候,电子就会被推向P区,在P区里电子跟空穴复合,然后就会以光子的形式发出能量,
这就是LED灯发光的原理。而光的波长也就是光的颜色,是由形成P-N结的材料决定的。
单个的LED灯珠只能在低电压(约3V)、低电流(约几毫安)下工作,发出的光线很微弱。需要将许多LED灯珠串联或并联起来;
同时单个LED灯珠是单向导电的,为了充分利用交流电的正负半周电流,这就需要一块集成电路芯片,将交流220V电源转变为电压、电流能与LED集合相匹配的直流电,
以满足LED灯珠集合体的要求,使其能正常发光。
下图是
MCU 外围连接
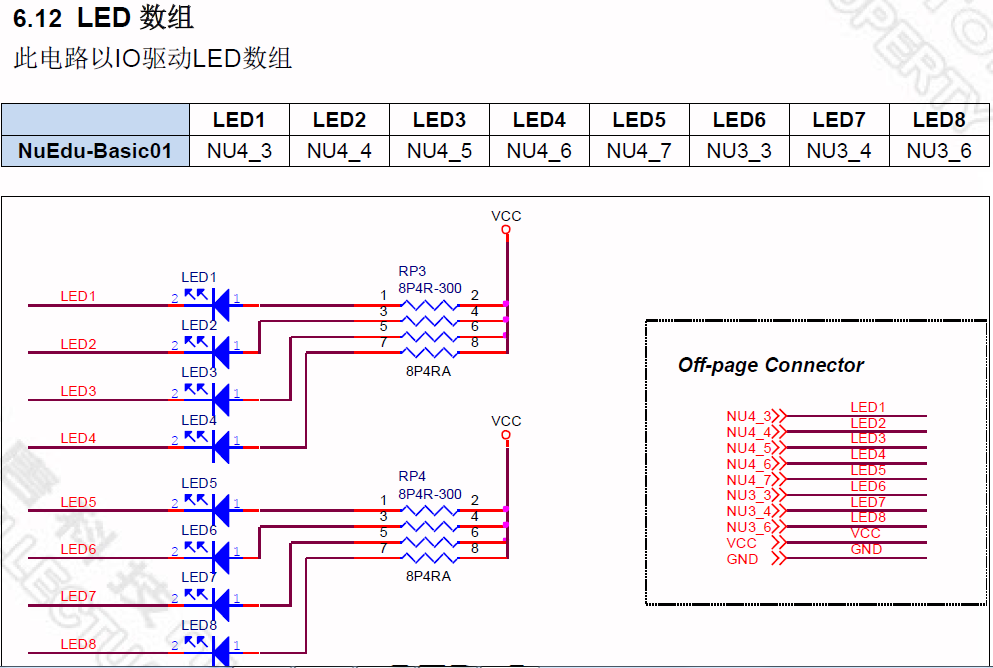
电路图您明白了么?再看软件的相应的库文件
/* Peripheral and SRAM base address */
#define SRAM_BASE (0x20000000UL) /*!< (SRAM ) Base Address */
#define PERIPH_BASE (0x40000000UL) /*!< (Peripheral) Base Address */
#define AHBPERIPH_BASE PERIPH_BASE
#define APBPERIPH_BASE (PERIPH_BASE + 0x00040000)
#define GCR_BASE (AHBPERIPH_BASE + 0x00000)
#define CLK_BASE (AHBPERIPH_BASE + 0x00200)
#define INT_BASE (AHBPERIPH_BASE + 0x00300)
#define GPIO_BASE (AHBPERIPH_BASE + 0x04000)
#define GPIOA_BASE (AHBPERIPH_BASE + 0x04000)
#define GPIOB_BASE (AHBPERIPH_BASE + 0x04040)
#define GPIOC_BASE (AHBPERIPH_BASE + 0x04080)
#define GPIOD_BASE (AHBPERIPH_BASE + 0x040C0)
#define GPIOE_BASE (AHBPERIPH_BASE + 0x04100)
#define GPIOF_BASE (AHBPERIPH_BASE + 0x04140)
#define GPIO_DBCTL_BASE (AHBPERIPH_BASE + 0x04440)
#define GPIO_PIN_DATA_BASE (AHBPERIPH_BASE + 0x04800)
#define PDMA_BASE (AHBPERIPH_BASE + 0x08000)
#define USBH_BASE (AHBPERIPH_BASE + 0x09000)
#define FMC_BASE (AHBPERIPH_BASE + 0x0C000)
#define EBI_BASE (AHBPERIPH_BASE + 0x10000)
#define CRC_BASE (AHBPERIPH_BASE + 0x31000)
#define SYS ((SYS_T *) GCR_BASE)
#define SYSINT ((SYS_INT_T *) INT_BASE)
#define CLK ((CLK_T *) CLK_BASE)
#define PA ((GPIO_T *) GPIOA_BASE)
#define PB ((GPIO_T *) GPIOB_BASE)
#define PC ((GPIO_T *) GPIOC_BASE)
#define PD ((GPIO_T *) GPIOD_BASE)
#define PE ((GPIO_T *) GPIOE_BASE)
#define PF ((GPIO_T *) GPIOF_BASE)
#define GPIO ((GPIO_DBCTL_T *) GPIO_DBCTL_BASE)
#define PDMA ((PDMA_T *) PDMA_BASE)
#define USBH ((USBH_T *) USBH_BASE)
#define FMC ((FMC_T *) FMC_BASE)
#define EBI ((EBI_T *) EBI_BASE)
#define CRC ((CRC_T *) CRC_BASE) #define GPIO_MODE_INPUT 0x0UL /*!< Input Mode */
#define GPIO_MODE_OUTPUT 0x1UL /*!< Output Mode */
#define GPIO_MODE_OPEN_DRAIN 0x2UL /*!< Open-Drain Mode */
#define GPIO_MODE_QUASI 0x3UL /*!< Quasi-bidirectional Mode */ /* One Bit Mask Definitions */
#define BIT0 0x00000001
#define BIT1 0x00000002
#define BIT2 0x00000004
#define BIT3 0x00000008
#define BIT4 0x00000010
#define BIT5 0x00000020
#define BIT6 0x00000040
#define BIT7 0x00000080
#define BIT8 0x00000100
#define BIT9 0x00000200
#define BIT10 0x00000400
#define BIT11 0x00000800
#define BIT12 0x00001000
#define BIT13 0x00002000
#define BIT14 0x00004000
#define BIT15 0x00008000
#define BIT16 0x00010000
#define BIT17 0x00020000
#define BIT18 0x00040000
#define BIT19 0x00080000
#define BIT20 0x00100000
#define BIT21 0x00200000
#define BIT22 0x00400000
#define BIT23 0x00800000
#define BIT24 0x01000000
#define BIT25 0x02000000
#define BIT26 0x04000000
#define BIT27 0x08000000
#define BIT28 0x10000000
#define BIT29 0x20000000
#define BIT30 0x40000000
#define BIT31 0x80000000 void GPIO_SetMode(GPIO_T *port, uint32_t u32PinMask, uint32_t u32Mode)
{
uint32_t i; for(i = ; i < GPIO_PIN_MAX; i++)
{
if(u32PinMask & ( << i))
{
port->MODE = (port->MODE & ~(0x3 << (i << ))) | (u32Mode << (i << ));
}
}
} void Initial_LED(void)
{
GPIO_SetMode(PB, BIT2, GPIO_MODE_OUTPUT); //LED1
GPIO_SetMode(PB, BIT3, GPIO_MODE_OUTPUT); //LED2
GPIO_SetMode(PC, BIT3, GPIO_MODE_OUTPUT); //LED3
GPIO_SetMode(PC, BIT2, GPIO_MODE_OUTPUT); //LED4
GPIO_SetMode(PA, BIT9, GPIO_MODE_OUTPUT); //LED5
GPIO_SetMode(PB, BIT1, GPIO_MODE_OUTPUT); //LED6
GPIO_SetMode(PC, BIT7, GPIO_MODE_OUTPUT); //LED7
}
关于AHB与APB在我的内核架构一文中有描述,再此不加说明。
你把这几部分放到一个程序中完全可以运行
I/O管脚的I状态可由软件独立地配置为输入,推挽式的输出,开漏或准双向模式。复位之后,所有管脚的模式取决于CIOIN (CONFIG0[10])的设置。
每个I/O管脚有一个阻值为110K~300K的弱上拉电阻接到VDD 上,VDD范围从5.0 V 到2.5 V。
首先我们来看上拉电阻与下拉电阻:
两者共同的作用是:避免电压的“悬浮”,造成电路的不稳定;
一、上拉电阻如图所示
1、概念:将一个不确定的信号,通过一个电阻与电源VCC相连,固定在高电平;
2、上拉是对器件注入电流;灌电流;
3、当一个接有上拉电阻的IO端口设置为输入状态时,它的常态为高电平;
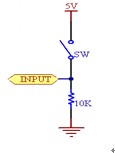
二、下拉电阻如图所示:
1、 概念:将一个不确定的信号,通过一个电阻与地GND相连,固定在低电平;
2、下拉是从器件输出电流;拉电流;
3、当一个接有下拉电阻的IO端口设置为输入状态时,它的常态为低电平;
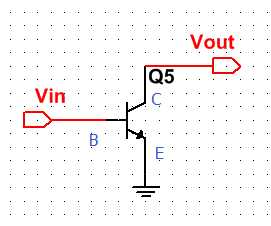
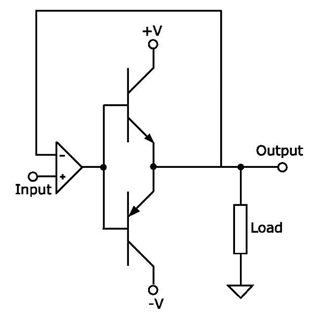
要理解推挽输出,首先要理解好三极管(晶体管)的原理。下面这种三极管有三个端口,分别是基极(Base)、集电极(Collector)和发射极(Emitter)。
下图是NPN型晶体管。
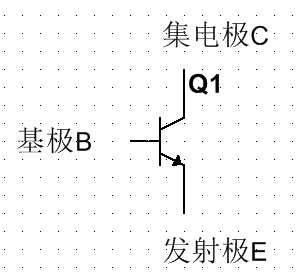
这种三极管是电流控制型元器件,注意关键词电流控制。意思就是说,只要基极B有输入(或输出)电流就可以对这个晶体管进行控制了。
下面请允许我换一下概念,把基极B视为控制端,集电极C视为输入端,发射极E视为输出端。这里输入输出是指电流流动的方向。
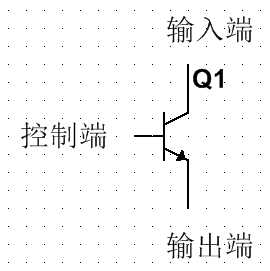
而PNP管正好相反,当有电流从控制端流出时,就会有电流从输入端流到输出端。

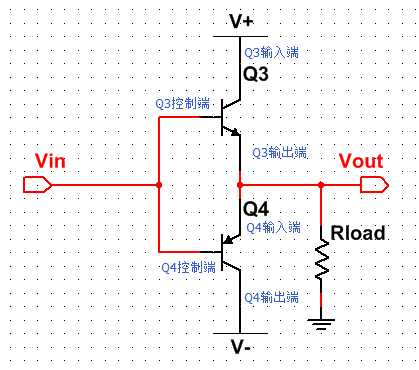
上面的三极管是N型三极管,下面的三极管是P型三极管,请留意控制端、输入端和输出端。
当Vin电压为V+时,上面的N型三极管控制端有电流输入,Q3导通,于是电流从上往下通过,提供电流给负载。
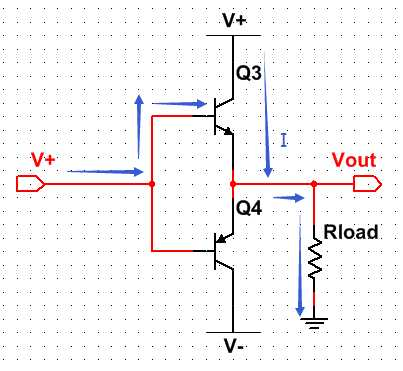
经过上面的N型三极管提供电流给负载(Rload),这就叫「推」
当Vin电压为V-时,下面的三极管有电流流出,Q4导通,有电流从上往下流过。
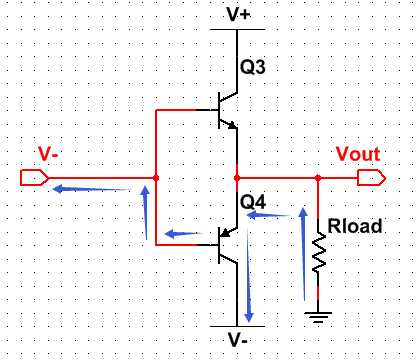
经过下面的P型三极管提供电流给负载(Rload),这就叫「挽」。
以上,这就是推挽(push-pull)电路。




那么什么是开漏呢?这个在我答案一开头给出的「网上资料」里讲得很详细了,我这里也简单写一下。
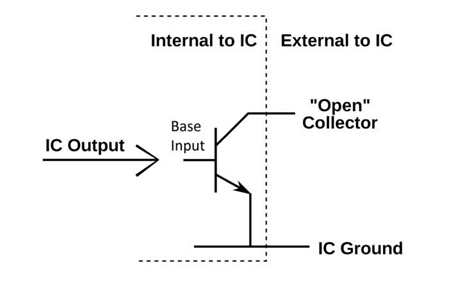
要理解开漏,可以先理解开集。
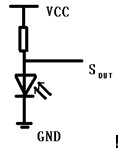
如图,开集的意思,就是集电极C一端什么都不接,直接作为输出端口。
如果要用这种电路带一个负载,比如一个LED,必须接一个上拉电阻,就像这样。

当Vin没有电流,Q5断开时,LED亮。 当Vin流入电流,Q5导通时,LED灭。
开漏电路,就是把上图中的三极管换成场效应管(MOSFET)。
N型场效应管各个端口的名称:

场效应管是电压控制型元器件,只要对栅极施加电压,DS就会导通。
结型场效应管有一个特性就是它的输入阻抗非常大,这意味着:没有电流从控制电路流出,也没有电流进入控制电路。没有电流流入或流出,就不会烧坏控制电路。而双极型晶体管不同,是电流控制性元器件,如果使用开集电路,可能会烧坏控制电路。这大概就是我们总是听到开漏电路而很少听到开集电路的原因吧?因为开集电路被淘汰了。
1、开漏
全部名字是,内部mos管漏极开路(也可理解为晶体管集电极开路)。输出引脚只有对地低阻抗以及高阻态两种模式。
2、推挽
内部有上下两个mos(或晶体管),输出引脚有对VCC低阻抗以及对地低阻抗两种模式。
下面付一个无脑版的,用开关代替晶体管或MOS管。等效电路。

1. 推挽输出能够输出高或者低,而开漏输出只能输出低,或者关闭输出,因此开漏输出总是要配一个上拉电阻使用。
2. 开漏输出的上拉电阻不能太小,太小的话,当开漏输出的下管导通时,电源到地的电压在电阻上会造成很大的功耗,因此这个电阻阻值通常在10k以上,这样开漏输出在从输出低电平切换到高电平时,速度是很慢的。
3. 推挽输出任意时刻的输出要么是高,要么是低,所以不能将多个输出短接,而开漏输出可以将多个输出短接,共用一个上拉,此时这些开漏输出的驱动其实是与非的关系。
4. 推挽输出输出高时,其电压等于推挽电路的电源,通常为一个定值,而开漏输出的高取决于上拉电阻接的电压,不取决于前级电压,所以经常用来做电平转换,用低电压逻辑驱动高电压逻辑,比如3.3v带5v。
在单片机学习、开发和应用中,IO口的配置对功能的实现起着重要的作用,下面介绍常见的四种配置,而现在很多单片机都兼有这四种配置,可供选择。
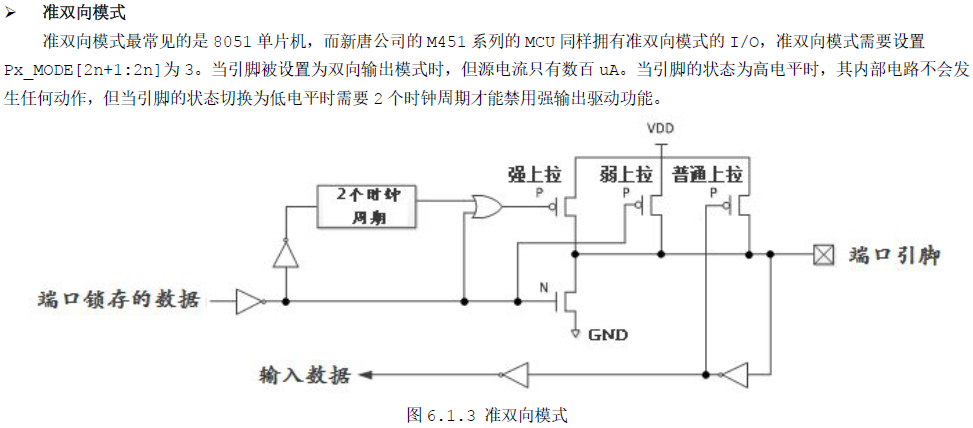
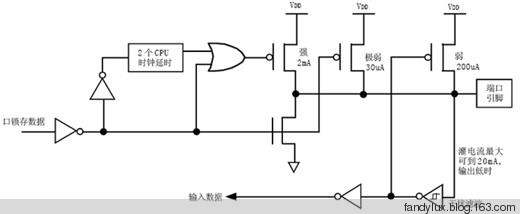
一.准双向口配置
如下图,当IO输出为高电平时,其驱动能力很弱,外部负载很容易将其拉至低电平。当IO输出为低电平时,其驱动能力很强,可吸收相当大的电流。
准双向口有三个上拉晶体管,一个“极弱上拉”,当端锁存器为逻辑“1”时打开,当端口悬空时,“极弱上拉”将端口上拉至高电平。
第二个上拉晶体管为“弱上拉”,当端口锁存器为逻辑“1”且端口本身也为“1”时打开,此上拉提供的电流,使准双向口输出为“1”。如果此时端口被
外部装置拉到逻辑“0”时,通过施密特触发器,控制“弱上拉”关闭,而“极弱上拉”维持开状态,为了把这个端口拉低,外部装置必须有足够的灌电流能力,使
管脚上的电压,降到门槛电以下。
第三个上拉晶体管为“强上拉”,当端口锁存器由“0”跳变到“1”时,这个上拉用来加快端口由逻辑“0”到逻辑“1”的转换速度。
准双向口做为输入时,通个一个施密特触如器和一个非门,用以干扰和滤波。
准双向口用作输入时,可对地接按键,如下图1,当然也可以去掉R1直接接按键,当按键闭合时,端口被拉至低电平,当按键松开时,端口被内部“极弱上
拉”晶体管拉至高电平。当端口作为输出时,不应对地外接LED如图形控制,这样端口的驱动能力很弱,LED只能发很微弱的光,如果要驱动LED,要采用图
3的方法,这样准双向口在输出为低时,可吸收20mA的电流,故能驱动LED。图4的方法也可以,不过LED不发光时,端口要吸收收很大电流。

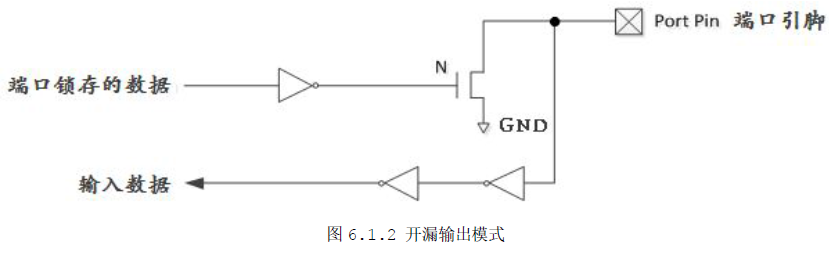
二.开漏输出配置
这种配置,关闭所有上拉晶体管,只驱动下拉晶体管,下拉与准双向口下拉配置相同,因此只能输出低电平(吸收电流),和高阻状态。不能输出高电平(输也电流)。如果要作为逻辑输出,必须接上拉电阻到VCC。这种配置也可以通过上图3和图4来驱动LED。
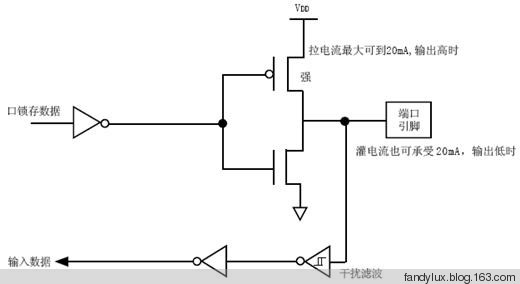
三.推挽输出配置
这种配置的下拉与准双向口和开漏配置相同,具有较强的拉电流能力,不同的是,具有持续的强上拉。因此可以用上图2的方法来驱动LED。
四.仅为输入配置(高阻配置)
这种配置不能输出电流,也不能有收电流,只能作为输入数据使用。

以上四种配置各有其特点,在使用中应根据其特点灵活运用。
准双向口的最大特点是既可以作为输入,也可以作为输出,不需要通过控制切换。
推挽输出的特点是,无论输也高电平还是低电平都有较大的驱动能力,在输也高电平时,也能直接点亮LED,这在准双向口中是不能办到的。这种配置不宜作为输入,因为这需要外部设备有很强的拉电流的能胃。
仅为输入配置的特点是端口只能作为输入使用,可以获得很高的输入阻抗,在有模拟比较器或ADC的端口中用得较多。
开漏输出配置与准又向口相似,但内部没有上拉电阻。有很好的电气兼容性,外部接上拉电阻到3V电源,就能和3V逻辑器件连接。外部接上拉电阻到5V电源,就要以和5V器件连接。
需要说明的是以上四种配置均可以作为输入,也就是都可以检测端的逻辑状态,但其特性不同,不是每种配置都可以直接接按键
就讲到这里,其实这就是I/O口的输入输出模式,具体看程序就可以清楚明白了
GPIO_SetMode(PC, BIT7, GPIO_MODE_OUTPUT);//#define GPIO_MODE_OUTPUT 0x0UL /*!< Input Mode */
设置成为了输出模式,之后我们在来看,这个函数的具体功能
while()
{
for(i = ; i < ; i++)
{
Write_LED_Bar(i);
for(j = ; j < ; j++)
CLK_SysTickDelay();
}
}
#define _LED1 PB2
#define _LED2 PB3
#define _LED3 PC3
#define _LED4 PC2
#define _LED5 PA9
#define _LED6 PB1
#define _LED7 PC7
#define _LED_Bar_Count 7
void Write_LED_Bar(uint32_t Number)
{
uint32_t i;
volatile uint32_t *ptrLED[_LED_Bar_Count] = {&_LED1, &_LED2, &_LED3, &_LED4, &_LED5, &_LED6, &_LED7}; for(i = ; i < _LED_Bar_Count; i++)
{
if((Number > i) & 0x01)
*ptrLED[i] = ; //LED ON
else
*ptrLED[i] = ; //LED OFF
}
}
如果我们假设Number为一的话,i为零时,1大于零,为真,为一,遇上0X01之后为真,则进行负值为零(开灯)的操作,它是共阳级的操作。
试试我写的这个
#define _LED1 PB2
#define _LED2 PB3
#define _LED3 PC3
#define _LED4 PC2
#define _LED5 PA9
#define _LED6 PB1
#define _LED7 PC7
volatile uint32_t *ptrLED[_LED_Bar_Count] = {&_LED1, &_LED2, &_LED3, &_LED4, &_LED5, &_LED6, &_LED7};
while()
{ for(i = ; i < ; i++)
{
*ptrLED[i]=;
for(j = ; j < ; j++)
{
CLK_SysTickDelay();
}
*ptrLED[i]=;
for(j = ; j < ; j++)
{
CLK_SysTickDelay();
}
if(i==)
{
i=;
}
}
}
这里需要的库文件有很多,另外LED很简单,不需要用到很多的库函数,下回我说说GPIO.H吧!
说说M451例程讲解之LED的更多相关文章
- M451例程讲解之GPIO.H
到了CORTEX-M4,几乎每一快都有很大的知识量,单单GPIO库文件这一项就有很长的章节要描述,加油吧 GPIO.h.是最基础的一个库文件,下面结合数据手册来一一进行讲解: 先把库文件粘上,方便一一 ...
- 说说M451例程讲解之定时器
关于定时器 相信很多人都不会陌生,无论是51还是32,任何微控制器,都会有定时器 定时器控制器包含 4 组 32-位定时器,TIMER0~TIMER3,提供用户便捷的计数定时功能.定时器可执行很多功能 ...
- M451例程讲解之按键
/**************************************************************************//** * @file main.c * @ve ...
- 说说M451例程讲解之串口
/**************************************************************************//** * @file main.c * @ve ...
- 玩转X-CTR100 l STM32F4 l 基础例程printf、LED、蜂鸣器、拨码开关、位带操作
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器基础板载资源 ...
- CH58X/CH57X/V208的Broadcaster(广播者)例程讲解
在对ble进行应用的时候,每个用户的需求可能不尽相同.这里着重介绍从机Broadcaster例程,只广播不连接. 使用该例程时可以在手机使用APP上对Broadcaster进行调试. 安卓端在应用市场 ...
- CH58X/CH57X/V208 Observer(观察者)例程讨论讲解
使用的是沁恒的CH582M的Observer例程与官方的demo板. 本例程的功能是主机扫描到从机的MAC地址并打印出来. 先对宏定义进行理解讨论. 最大响应扫描数为8,在串口调试助手那里可以看到打印 ...
- 【iCore2 模块相关资料】iM_LAN 100M 以太网模块UDP例程
============================== 技术论坛:http://www.eeschool.org 博客地址:http://xiaomagee.cnblogs.com 官方网店:h ...
- 【iCore2 双核心板视频教程一】iM_LAN 100M 以太网模块UDP例程(包含视频教程)
============================== 技术论坛:http://www.eeschool.org 博客地址:http://xiaomagee.cnblogs.com 官方网店:h ...
随机推荐
- php和js以及ts的传值
egret是用ts写h5游戏,然后编译为js,有些数据想在加载时由服务端生成. 一种方法用网络请求,另外一种方法直接传值. 网络请求如果在运行中,有数据交互,其实是个比较好的选择. 而我只是在初始化时 ...
- 【Unity/Kinect】Kinect实现UI控件的点击
用体感来实现UI控件的点击,如点击按钮. 做法:用一个图片表示左手手掌,图片位置追踪左手手掌移动,当手掌位于UI控件的矩形内时,握拳表示点击该控件. using UnityEngine; using ...
- Extjs 解决在IE 火狐浏览器字体太小问题
<style type="text/css"> *{font-size:12px!important;} </style>
- Zookeeper和分布式环境中的假死脑裂问题(转)
Zookeeper和分布式环境中的假死脑裂问题 最近和同事聊天无意间发现他们的系统也存在脑裂的问题.想想当初在我们的系统中为了解决脑裂花了非常大的功夫,现在和大家一起讨论下脑裂,假死等等这些问题和解决 ...
- android学习日记01--综述
开个博客,写点关于Android的知识,希望温故而知新吧! 一.总体框架 先上一张google提供官方的Android框架图: Android系统架构由5部分组成,分别是:Linux Kernel.A ...
- 使用Ant编译Hadoop工程报错
在win7用Ant编译hadoop工程的时候,遇到了一个报错,如下: org.eclipse.core.runtime.CoreException: D:\workspace\hadoop-1.1.2 ...
- iOS边练边学--UIGestureRecognizer手势识别器简单介绍
iOS 3.2之后,苹果退出了手势识别功能(Gesture Recognizer),在触摸事件处理方面,大大简化了开发者的开发难度. 一.UIGestureRecognizer UIGestureRe ...
- Connector/c++ 查询Mysql,出现 can't fetch because not on result set 错误
使用 Connector/C++ 查询 Mysql 时,出现错误,提示如下: can't fetch because not on result set, 出现原因可以看这里:http://stack ...
- js学习笔记18----元素创建操作
1.父级.appendChild(新的元素) 从后面开始追加子元素. 2.父级.insertBefore(新的元素,被插入的元素) 在指定元素前面开始插入一个新元素. 兼容性:在ie下,如果第二个参数 ...
- SAX与DOM解析XML的区别
解析xml有四种方法:DOM,SAX,DOM4j,JDOM. 我们主要学了两种:DOM和SAX. DOM适于解析比较简单的XML而SAX则适于解析较复杂的XML文件.各有各的好. DO ...