Halcon阈值化算子dual_threshold和var_threshold的理解
Halcon中阈值二值化的算子众多,通常用得最多的有threshold、binary_threshold、dyn_threshold等。
threshold是最简单的阈值分割算子,理解最为简单;binary_threshold是自动阈值算子,它可以自动选出暗(dark)的区域,或者自动选出亮(light)的区域,理解起来也没有难度。
动态阈值算子dyn_threshold理解起来稍微复杂一点,使用dyn_threshold算子的步骤基本是这样的:
① 将原图进行滤波平滑处理。
② 用原图和平滑后的图逐个像素做比较,它可以根据参数分割出原图比平滑后的图灰度高(或者低)若干个灰度值的区域。
举例如下:

处理程序是这样的:
read_image (Image, 'C:/Users/happy xia/Desktop/dynPic.png')
mean_image (Image, ImageMean, 9, 9)
dyn_threshold (Image, ImageMean, RegionDynThresh, 10, 'dark')
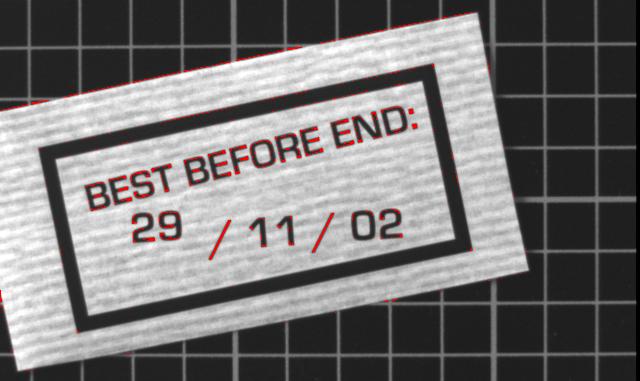
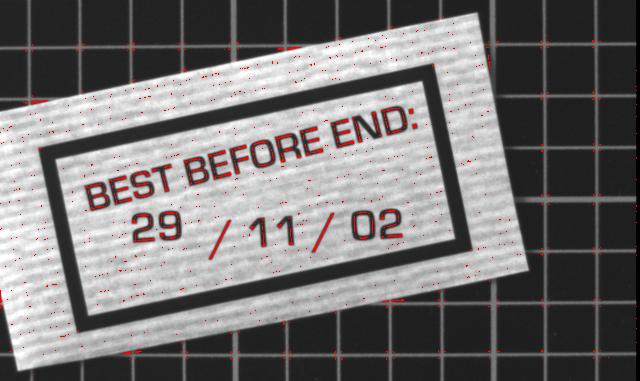
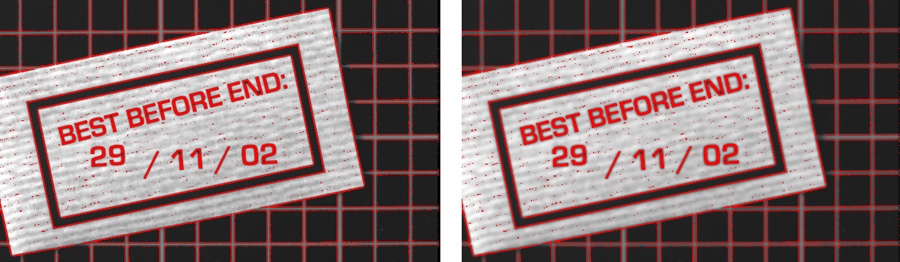
程序分析:本例中,将图片模糊后,点阵字的黑色扩散了,随之就是字的黑色不如原图那么黑了,那么通过给定的限值“10”和“dark”,就可以将原图比模糊后的图暗10个灰阶以上的区域(即黑色文字部分)选出来了。
以上所说的三个算子并不是本文的重点,但却是理解下面的两个阈值分割算子的准备知识。
1、dual_threshold
先看程序和效果图再分析。

read_image (Image, 'C:/Users/happy xia/Desktop/2.png')
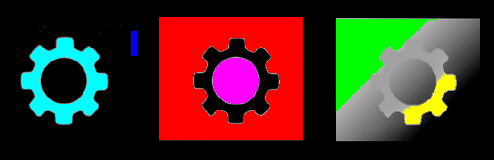
dual_threshold (Image, RegionCrossings, 174, 200, 180)
dual_threshold(Image : RegionCrossings : MinSize, MinGray, Threshold : )
该算子签名中:Threshold 表示用于分割的阈值数值,MinSize表示分割出来的区域的最小面积(即数像素的数目个数),MinGray表示分割出来的区域对应的原图中图像像素的最高灰度不能低于MinGray设定值。
注意图中蓝色矩形小色块的面积是175个像素,因此当MinSize = 174时,它可以被分割出来。
OK,我知道这么说比较拗口。下面我边改变参数边观察效果图,并做简要分析:
read_image (Image, 'C:/Users/happy xia/Desktop/2.png')
dual_threshold (Image, RegionCrossings, , , )
效果图如下:
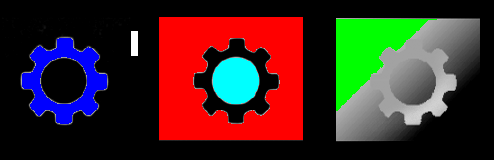
由于最小面积设置为176,那么面积为175像素的矩形小色块就没有被分割出来。
再来改变MinGray参数:
read_image (Image, 'C:/Users/happy xia/Desktop/2.png')
dual_threshold (Image, RegionCrossings, , , )
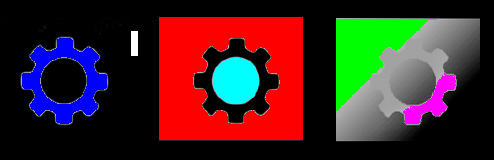
此时观察到,最右边那个齿轮本来分割出来的区域没有了!
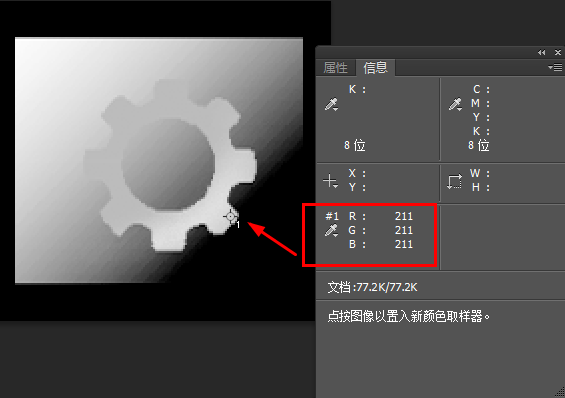
通过取色器观察可知,这块区域最亮的灰度大概比211高一点点。
我们把这个值略微调低再看看:
read_image (Image, 'C:/Users/happy xia/Desktop/2.png')
dual_threshold (Image, RegionCrossings, , 210, )
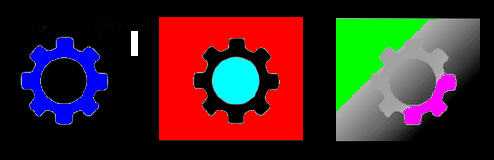
最右边那个齿轮右下角那一块又被分割出来了!
相信通过这样参数的反复调节,大家已经彻底明白了dual_threshold算子的意义和用法。
我们看这个算子的名称——dual是“双”的意思,也就是双阈值。如果我们让参数列表中的MinGray = Threshold,那就是单阈值了。
read_image (Image, 'C:/Users/happy xia/Desktop/2.png')
dual_threshold (Image, RegionCrossings, , 180, 180)
这个算子是很高效的。如果要完成上面这个程序这样的功能,用threshold算子的话,代码要这样写:
read_image (Image, 'C:/Users/happy xia/Desktop/2.png')
threshold (Image, Region, , )
connection (Region, ConnectedRegions)
select_shape (ConnectedRegions, SelectedRegions, 'area', 'and', , )
也就是说dual_threshold一条算子顶这三条算子。
dual_threshold算子的缺陷:它只能分割出灰度值高的亮区域,不能分割出灰度值低的暗区域。
下面介绍var_threshold算子。
2、var_threshold
先看var_threshold算子的签名:
var_threshold(Image : Region : MaskWidth, MaskHeight, StdDevScale, AbsThreshold, LightDark : )
MaskWidth、 MaskHeight是用于滤波平滑的掩膜单元;StdDevScale是标准差乘数因子(简称标准差因子);AbsThreshold是设定的绝对阈值;LightDark有4个值可选,'light'、'dark'、'equal'、'not_equal'。
需要强调的是var_threshold算子和dyn_threshold算子极为类似。不同的是var_threshold集成度更高,并且加入了“标准差×标准差因子”这一变量。
举例:
read_image (Image, 'C:/1.png')
var_threshold (Image, Region, , , 0.2, , 'dark')

在该程序中,先用4×4的掩膜在图像上逐像素游走,用原图中的当前像素和对应掩膜中16个像素的灰度均值对比,找出暗(dark)的区域。当原图像素灰度比对应的掩膜灰度均值低(0.2,12)个灰阶时,该区域被分割出来。本程序中StdDevScale = 0.2, AbsThreshold = 12,问题的关键就是理解如何通过StdDevScale和AbsThreshold来确定用于分割的阈值。
var_threshold的帮助文档中是这么写的:

说明:
1、d(x,y)指的是遍历每个像素时,掩膜覆盖的那些像素块(本例中是4×4 = 16个像素)灰度的标准差;StdDevScale 是标准差因子。
2、当标准差因子StdDevScale ≥ 0 时,v(x,y) 取(StdDevScale ×标准差)和AbsThreshold 中较大的那个。
3、当标准差因子StdDevScale < 0 时,v(x,y) 取(StdDevScale ×标准差)和AbsThreshold 中较小的那个。实测发现,这里的比较大小是带符号比较,由于标准差是非负数,当StdDevScale < 0 时,(StdDevScale ×标准差)≤ 0恒成立。所以此时的取值就是(StdDevScale ×标准差)。
文档是这么说的:
If StdDevScale*dev(x,y) is below AbsThreshold for positive values of StdDevScale or above for negative values StdDevScale, AbsThreshold is taken instead.
大致意思是:
当StdDevScale为正时,如果StdDevScale*dev(x,y) 低于 AbsThreshold,则采用AbsThreshold。
当StdDevScale为负时,如果StdDevScale*dev(x,y) 高于 AbsThreshold,则采用AbsThreshold。
我找了一块黑白过渡处4×4的像素块,求得它的灰度标准差为51.16(或49.53):
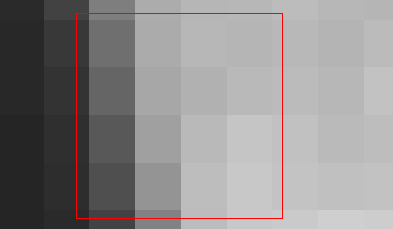
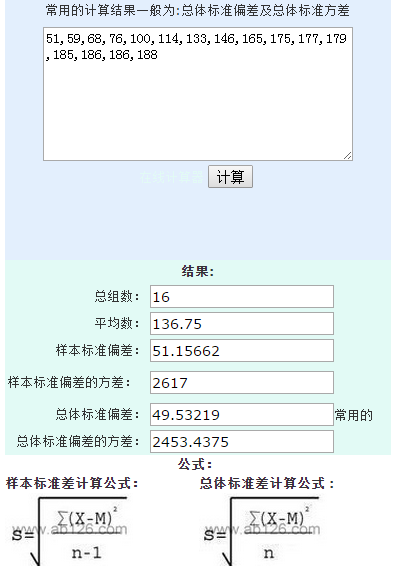
帮助文档中StdDevScale 的推荐值范围是-1~1,一般通过上面的例子可知,一般的明显的黑白过度处的标准差在50左右,乘以StdDevScale即-50 ~ 50 ,50的灰度差异,对于分割来说一般是够了的。
文档还说:推荐的值是0.2,如果参数StdDevScale太大,可能分割不出任何东西;如果参数StdDevScale太小(例如-2),可能会把整个图像区域全部输出,也就说达不到有效分割的目的。(……with 0.2 as a suggested value. If the parameter is too high or too low, an empty or full region may be returned.)
最后再看看是怎么分割像素的:

其中g(x,y)指的是原始图像当前像素的灰度值;m(x,y)指的是遍历像素时,掩膜覆盖的像素的平均灰度值(mean)。
以LightDark = ‘dark’为例,当满足m(x,y) - g(x,y) ≥ v(x,y)时(即原始图像对应像素灰度比掩膜像素灰度均值低v(x,y)个灰度值以上),相应的灰度值低的暗像素被分割出来。
最后看几个例子体会一下:(对比之前的例子var_threshold (Image, Region, 4, 4, 0.2, 12, 'dark')的效果)
① 将AbsThreshold 由12改成30,此时分割出的区域变小。
read_image (Image, 'C:/1.png')
var_threshold (Image, Region, , , 0.2, , 'dark')
② AbsThreshold 保持12不变,将StdDevScale由0.2改成0.7,此时分割出的区域变小。
③ 将参数改为var_threshold (Image, Region, 4, 4, -0.01, 12, 'dark'),此时分割出的区域大大增加,由前面的分析可知,此时参数AbsThreshold = 12无效,事实上,此时将AbsThreshold 改为1、50甚至200都对最终结果没有任何影响。

通过本人的分析,我认为StdDevScale取负值意义不大,因为它会分割出大量的不需要的区域,故一般推荐使用该算子时,StdDevScale取正值。
需要强调的是:在黑白过渡处,一般掩膜覆盖的像素的标准差较大,而在其他平缓的地方,标准差较小;因此最终采用的分割阈值随着掩膜在不断遍历像素的过程中,在(StdDevScale×标准差)和AbsThreshold 之间不断切换。
var_threshold和dyn_threshold的区别和联系:
dyn_threshold是将原图和滤波平滑后的图对比,var_threshold是将原图和对应像素掩膜覆盖的像素的平均灰度值对比。
在算子var_threshold中,如果参数StdDevScale = 0,那么就可以用动态阈值的方式非常近似地模拟。以下两种算法的效果极为类似:
read_image (Image, 'C:/1.png')
var_threshold (Image, Region, , , , , 'dark')
read_image (Image, 'C:/1.png')
mean_image (Image, ImageMean, , )
dyn_threshold (Image, ImageMean, RegionDynThresh, , 'dark')
两种方法的效果图:
那么当StdDevScale > 0 时,var_threshold对比dyn_threshold还存在什么优点呢?我认为是在黑白过渡处能减少分割出不需要的区域的概率。(因为黑白过渡处标准差大,当然前提是StdDevScale 不能设置得太小)
(网上关于这两个算子的系统介绍很少,我的理解难免有不足之处,欢迎大家回复讨论)
Halcon阈值化算子dual_threshold和var_threshold的理解的更多相关文章
- HALCON中的算子大全(中英对照)
HALCON中的算子大全(中英对照) Chapter 1 :Classification1.1 Gaussian-Mixture-Models1.add_sample_class_gmm功能:把一个训 ...
- OpenCV3编程入门笔记(4)腐蚀、膨胀、开闭运算、漫水填充、金字塔、阈值化、霍夫变换
腐蚀erode.膨胀dilate 腐蚀和膨胀是针对图像中的白色部分(高亮部分)而言的,不是黑色的.除了输入输出图像外,还需传入模板算子element,opencv中有三种可以选择:矩形MORPH_RE ...
- 【学习opencv第七篇】图像的阈值化
图像阈值化的基本思想是,给定一个数组和一个阈值,然后根据数组中每个元素是低于还是高于阈值而进行一些处理. cvThreshold()函数如下: double cvThreshold( CvArr* s ...
- 灰度图像阈值化分割常见方法总结及VC实现
转载地址:http://blog.csdn.net/likezhaobin/article/details/6915755 在图像处理领域,二值图像运算量小,并且能够体现图像的关键特征,因此被广泛使用 ...
- S0.4 二值图与阈值化
目录 二值图的定义 二值图的应用 阈值化 二值化/阈值化方法 1,无脑简单判断 opencv3函数threshold()实现 2,Otsu算法(大律法或最大类间方差法) OpenCV3 纯代码实现大津 ...
- opencv学习之路(13)、图像阈值化threshold
一.图像阈值化简介 二.固定阈值 三.自适应阈值 #include<opencv2/opencv.hpp> using namespace cv; void main(){ Mat src ...
- opencv2函数学习之threshold:实现图像阈值化
在opencv2中,threshold函数可以进行阈值化操作. double threshold( const Mat& src, Mat& dst, double thresh,do ...
- 图像阈值化-threshold、adaptivethreshold
在图像处理中阈值化操作,从一副图像中利用阈值分割出我们需要的物体部分(当然这里的物体可以是一部分或者整体).这样的图像分割方法是基于图像中物体与背景之间的灰度差异,而且此分割属于像素级的分割.open ...
- opencv之图像阈值化处理
一.函数简介 1.threshold-图像简单阈值化处理 函数原型:threshold(src, thresh, maxval, type, dst=None) src:图像矩阵 thresh:阈值 ...
随机推荐
- threading模块创建线程
什么是线程 (thread) 线程也是一种多任务编程方式,可以使用计算机的多核资源.线程被称为轻量级的进程. 线程特征 *线程计算机多核分配的最小单位 *一个进程可以包含多个线程 *线程也是一个运行的 ...
- Springboot - 建立简单的用户登录系统
在开始编码前,先建立几个Package(可以按个人习惯命名),如图 1.Controllers 用于存放控制器类 2.Models 用于存放数据实体类 3.Repositories 用于存放数据库操作 ...
- Jenkins构建常见问题
最近在用jenkins搭建.NET自动编译发布环境时遇到的一些问题,解释不一定都对,仅记录以备后用. 1.MSBUILD : error MSB1008: 只能指定一个项目 Build a Visua ...
- 浅谈ASP.NET ---- 系列文章
[01]浅谈Google Chrome浏览器(理论篇) [02]浅谈Google Chrome浏览器(操作篇)(上) [03]浅谈Google Chrome浏览器(操作篇)(下) [04]浅谈ASP. ...
- Jmeter二次开发之代码环境搭建(QQ交流群:577439379)
一.创建项目 1. 分别下载apache3.1 binaries和source两个压缩包,前者为release版本,后者为jmeter最新的源码,下载地址:http://jmeter.apache.o ...
- linux下nginx安装、配置实战
1什么是Nginx Nginx("enginex")是一个高性能的HTTP和反向代理服务器,也是一个IMAP/POP3/SMTP代理服务器,在高连接并发的情况下Nginx是Apac ...
- C++ 类外定义
类内定义与内联函数 像下面这种函数名与函数体都写在类里面的函数形式被称作类内定义,编译器编译的时候会把它默认成内联函数. class Student { public: void setAge(int ...
- Call to your teacher
链接:https://www.nowcoder.net/acm/contest/76/F来源:牛客网 Call to your teacher 时间限制:C/C++ 1秒,其他语言2秒 空间限制:C/ ...
- springboot中对yaml文件的解析
一.YAML是“YAML不是一种标记语言”的外语缩写 (见前方参考资料原文内容):但为了强调这种语言以数据做为中心,而不是以置标语言为重点,而用返璞词重新命名.它是一种直观的能够被电脑识别的数据序列化 ...
- JMS消息模型
消息机制: 系统之间通信的中介,作为一台单独的服务器部署,大多数使用多个系统之间协作,是系统解耦的常见解决方案. 基于CS架构 作用:多个系统之间解耦,项目可以分开开发,满足显示的高可用(也可以说是异 ...