Arm寄存器介绍及汇编基础
一、ARM处理器支持7种工作模式
① 用户模式(USR): 用于正常执行程序(The normal ARM program execution state)
② 快速中断模式(FIQ): 用于高速数据传输(Designed to support a data transfer or channel process)
③ 外部中断模式(IRQ): 用于通常的中断处理(Used for general-purpose interrupt handling)
④ 管理模式(SVC): 操作系统使用的保护模式(Protected mode for the operating system)
⑤ 数据访问终止模式(ABT): 当数据或指令预取终止时进入该模式(Entered after a data or instruction prefetch abort)
⑥ 系统模式(SYS): 运行具有特权的操作系统任务(A privileged user mode for the operating system)
⑦ 未定义指令异常模式(UND): 当未定义的指令执行时进入该模式(Entered when an undefined instruction is executed)
注:ARM微处理器的运行模式可以通过软件改变(修改CPSR后5位),也可以通过中断或者异常处理改变
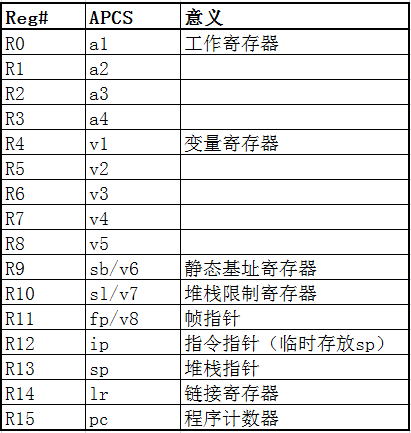
二、ARM寄存器
① ARM微处理器共有37个32位处理器,其中31个位通用寄存器,6个为状态寄存器

注:其中带阴影的寄存器为各个模式私有的寄存器,未带阴影为各模式共有寄存器
② ARM寄存器分类
(1)不分组寄存器:R0~R7
(2)分组寄存器:R8~R14(R13通常用作栈指针SP,R14通常用作子程序链接寄存器LR)
(3)程序计数器:R15(PC)
③ APCS(ARM Procedure Call Standard)对ARM各个寄存器的命名
④ ARM状态寄存器(CPRS):(SPSR是CPSR的备份,只有异常模式才有)
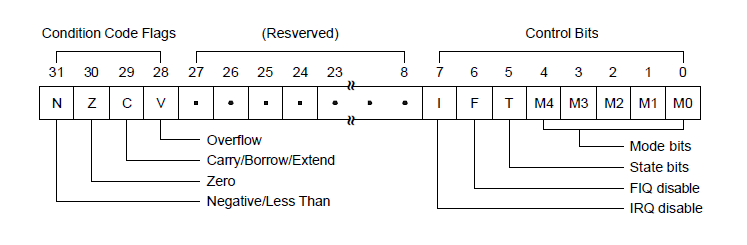
(1)Mode bits(模式位)
0b10000:USR
0b10001:FIQ
0b10010:IRQ
0b10011:SVC
0b10111:ABT
0b11011:SYS
0b11111:UND
(2)T:工作状态位(Thumb:1 ARM:0)
(3)F:FIQ中断禁止位(禁止:1 允许:0)
(4)I:IRQ中断禁止位(禁止:1 允许:0)
(5)NZCV:条件标志位
三、ARM寻址方式
① 立即数寻址:操作数本身就在指令中
ADD R0, R1, #0x01
ADD R0, R0, #0x3f
② 寄存器寻址:利用寄存器中的数值作为操作数
ADD R0, R1, R2
③ 寄存器间接寻址:以寄存器中的值作为地址,而操作数本身存放在存储器中
ADD R0, R1, [R2]
LDR R0, [R2]
④ 基址变址寻址:将寄存器中的内容与指令中给出的地址偏移量相加,从而得到一个操作数的有效地址
LDR R0, [R1, #]
LDR R0, [R1, #]!
LDR R0, [R1], #
LDR R0, [R1, R2]
⑤ 多寄存器寻址:一条指令可以完成多个寄存器值得传送
LDMIA R0, {R1, R2, R3, R4}
⑥ 相对寻址:以程序计数器PC的当前值为基地址,指令中的地址标号作为偏移量,将两者相加之后得到操作数的有效地址
BL NEXT
...
NEXT:
...
MOV PC, LR
⑦ 堆栈寻址:
stmfd sp!, {r1-r3};
ldmfd sp!, {r0-r12, lr, pc}^
四、ARM汇编指令介绍
1. 程序状态寄存器访问指令
(1)MRS指令:用于将程序状态寄存器的内容传送到通用寄存器中
格式: MRS{条件} 通用寄存器, 程序状态寄存器(CPSR或SPSR)
MRS R0, CPSR ; 复制 CPSR 到 R0 中
MRS R0, SPSR ; 复制 SPSR 到 R0 中
(2)MSR指令:用于将普通寄存器的内容传送到程序状态寄存器的特定域
格式: MSR{条件} 程序状态寄存器(CPSR或SPSR)_<域>, 通用寄存器
MSR CPSR, R0 ; 复制 R0 到 CPSR 中
MSR SPSR, R0 ; 复制 R0 到 SPSR 中
MSR CPSR_flg, R0 ; 复制 R0 的标志位到 CPSR 中
MSR CPSR_flg, #<< ; 复制(立即值)标志位到 CPSR 中
(3)CPSR是当前的程序状态寄存器(Current Program Status Register),而 SPSR 是保存的程序状态寄存器(Saved Program Status Register)。每个有特权的模式都有自己的 SPSR,可获得的 PSR 有:
- CPSR_all - 当前的
- SPSR_svc - 保存的,SVC(32) 模式
- SPSR_irq - 保存的,IRQ(32) 模式
- SPSR_abt - 保存的,ABT(32) 模式
- SPSR_und - 保存的,UND(32) 模式
- SPSR_fiq - 保存的,FIQ(32) 模式
(4)改变模式代码:
MRS R0, CPSR_all ; 复制 PSR
BIC R0, R0, #&1F ; 清除模式位
ORR R0, R0, #new_mode ; 把模式位设置为新模式
MSR CPSR_all, R0 ; 写回 PSR,变更模式
2. 寄存器装载和存储指令
(1)LDR/STR指令:用于寄存器和存储器之间数据的传送
格式:LDR/STR{条件} Rd, <地址>
LDR/STR{条件}B Rd, <地址>
备注:‘B’,表示只装载或存储一个单一的字节
STR Rd, [Rbase] 存储 Rd 到 Rbase 所包含的有效地址。
STR Rd, [Rbase, Rindex] 存储 Rd 到 Rbase + Rindex 所合成的有效地址。
STR Rd, [Rbase, #index] 存储 Rd 到 Rbase + index 所合成的有效地址。
index 是一个立即值。
例如,STR Rd, [R1, #] 将把 Rd 存储到 R1+。
STR Rd, [Rbase, Rindex]! 存储 Rd 到 Rbase + Rindex 所合成的有效地址,
并且把这个新地址写回到 Rbase。
STR Rd, [Rbase, #index]! 存储 Rd 到 Rbase + index 所合成的有效地址,
并且并且把这个新地址写回到 Rbase。
STR Rd, [Rbase], Rindex 存储 Rd 到 Rbase 所包含的有效地址。
把 Rbase + Rindex 所合成的有效地址写回 Rbase。
STR Rd, [Rbase, Rindex, LSL #]
存储 Rd 到 Rbase + (Rindex * ) 所合成的有效地址。
STR Rd, place 存储 Rd 到 PC + place 所合成的有效地址。
(2)LDM/STM指令:装载和存储多个字的数据从/到内存(LDM/STM 的主要用途是把需要保存的寄存器复制到栈上)
格式:LDM/STM{条件}{类型} Rn{!}, <寄存器列表>{^}
① 类型
IA: 每次传送后地址加1
IB: 每次传送前地址减1
DA: 每次传送后地址减1
DB: 每次传送前地址减1
FD: 满递减堆栈
ED: 空递减堆栈
FA: 满递增堆栈
EA: 空递增堆栈
②{!}:可选后缀,选用后,当数据传送完毕之后,将最后的地址写入基地址寄存器,否则基地址寄存器的内容不变
③{^}:可选后缀,当指令为LDM且寄存器列表中包含R15,选用该后缀表示:除了正常的数据传送之外,还要将SPSR复制到CPSR
STMFD R13!, {R0, R4-R12, LR} ;寄存器->存储器
LDMFD R13!, {R0, R4-R12, LR} ;存储器->寄存器
(3)SWP指令:在存储器和寄存器之间交换数据
SWP{条件}{B} 目的寄存器, 源寄存器1,[源寄存器2]
注:将源寄存器2所指向的存储器数据传送到目的寄存器,同时将源寄存器1的内容存储到源寄存器2所指向的存储器中。
SWP R0, R1, [R2]
SWP R0, R0, [R1]
3. 算术和逻辑指令
(1)ADC指令:带进位的加法
格式:ADC{条件}{S} 目的寄存器 操作数1 操作数2
ADDS R0, R4, R8 ; 加低端的字
ADCS R1, R5, R9 ; 加下一个字,带进位
ADCS R2, R6, R10 ; 加第三个字,带进位
ADCS R3, R7, R11 ; 加高端的字,带进位
注:{S}更改进位标志
(2)ADD指令:用于将两个操作数相加,并将结果存放到目的寄存器中
格式:ADD{条件}{S} 目的寄存器 操作数1 操作数2
ADD R0, R1, R2 ; R0 = R1 + R2
ADD R0, R1, # ; R0 = R1 + 256
ADD R0, R2, R3,LSL# ; R0 = R2 + (R3 << 1)
(3)AND指令:逻辑与
格式:AND{条件}{S} 目的寄存器 操作数1 操作数2
AND R0, R0, # ; R0 = 保持 R0 的位 0 和 1,丢弃其余的位。
(4)BIC指令:位清除
格式:BIC{条件}{S} 目的寄存器 操作数1 操作数2
BIC R0, R0, #% ; 清除 R0 中的位 0、1、和 3。保持其余的不变。
(5)EOR指令:逻辑异或
格式:EOR{条件}{S} 目的寄存器 操作数1 操作数2
EOR R0, R0, # ; 反转 R0 中的位 0 和 1
(6) MOV指令:完成从另一个寄存器、被移位寄存器或将另一个立即数加载到目的寄存器
格式:MOV{条件}{s} 目的寄存器, 源操作数
MOV R0, R0 ; R0 = R0... NOP 指令
MOV R0, R0, LSL#3 ; R0 = R0 * 8
MOV PC, R14 ; 退出到调用者
MOVS PC, R14 ; 退出到调用者并恢复标志位(不遵从 32-bit体系)
(7)MVN指令:传送取反的值
格式:MVN{条件}{s} 目的寄存器, 源操作数
MVN R0, #4 ; R0 = -5
MVN R0, #0 ; R0 = -1
(8)ORR指令:逻辑或
格式:ORR{条件}{S} 目的寄存器 操作数1 操作数2
ORR R0, R0, # ; 设置 R0 中位 0 和 1
(9)RSB指令:反向减法
格式:RSB{条件}{S} 目的寄存器 操作数1 操作数2
RSB R0, R1, R2 ; R0 = R2 - R1
RSB R0, R1, # ; R0 = 256 - R1
RSB R0, R2, R3,LSL# ; R0 = (R3 << 1) - R2
(10)RSC指令:带借位的反向减法
格式:RSC{条件}{S} 目的寄存器 操作数1 操作数2(目的寄存器 = 操作数2 - 操作数1 - !carry)
(11)SBC指令:带借位的减法
格式:SBC{条件}{S} 目的寄存器 操作数1 操作数2(目的寄存器 = 操作数1 - 操作数2 - !carry)
(12)SUB指令:减法
格式:SUB{条件}{S} 目的寄存器 操作数1 操作数2
SUB R0, R1, R2 ; R0 = R1 - R2
SUB R0, R1, # ; R0 = R1 - 256
SUB R0, R2, R3,LSL# ; R0 = R2 - (R3 << 1)
4. 移位操作
(1)LSL指令:
(2)ASL指令:
(3)LSR指令:
(4)ASR指令:
(5)ROR指令:
(6)RRX指令:
5. 乘法指令
(1)MLA指令:
(2)MUL指令:
6. 比较指令
(1)CMN
(2)CMP
(3)TEQ
(4)TST
6. 分支指令:用于实现程序流程的跳转
(1)B指令:分支
格式: B {条件} 目标地址
(2)BL:带返回的跳转指令(在跳转之前将PC值保存在R14中)
格式: BL {条件} 目标地址
CMP R1, #
BEQ Label
(3)条件执行
BEQ Branch if EQual
BNE Branch if Not Equal
BVS Branch if oVerflow Set
BVC Branch if oVerflow Clear
BHI Branch if HIgher
BLS Branch if Lower or the Same
BPL Branch if PLus
BMI Branch if MInus
BCS Branch if Carry Set
BCC Branch if Carry Clear
BGE Branch if Greater than or Equal
BGT Branch if Greater Than
BLE Branch if Less than or Equal
BLT Branch if Less Than
7. 软件中断指令
(1)SWI
格式:SWI{条件} <24 位编号>
①执行SWI软中断指令,硬件会做的事情:
* 进入Supervisor模式
* 拷贝CPSR至SPSR_svc
* 拷贝异常返回地址至LR_svc
* 将0x00000008装入PC
②
Arm寄存器介绍及汇编基础的更多相关文章
- ARM寄存器介绍
ARM处理器共有37个寄存器.其中包括:31个通用寄存器,包括程序计数器(PC)在内.这些寄存器都是32位寄存器.以及6个32位状态寄存器.但目前只使用了其中12位.ARM处理器共有7种不同的处理器模 ...
- GNU ARM 汇编基础
ARM GNU汇编基础 0 前言 全文补充提醒: 笔者在阅读ARM官方文档及查阅实际的u-boot源码中的汇编代码后,发现了一些不同于ARM官方文档中的汇编语法,查阅相关资料后,才发现主要由于汇编器的 ...
- ARM 寄存器的介绍
ARM 寄存器 31个通用, 32个程序状态寄存器 怎么算的呢: (R0--R15) 16 + 7 + 8 =31 通用 程序状态寄存器: 6 个 共 37 个. 不分组寄存器: ...
- iot漏洞mips汇编基础
1 基础概念 MIPS(Microprocessor without Interlocked Piped Stages architecture),是一种采取精简指令集(RISC)的处理架构,由MIP ...
- arm GIC介绍之一【转】
转自:https://blog.csdn.net/sunsissy/article/details/73791470 GIC是ARM架构中及其重要的部分,本文只在公开ARM对应资料基础上,以MTK开发 ...
- ARM指令集详解--汇编
1. 汇编 1.1. 通用寄存器 通用寄存器 37个寄存器,31个通用寄存器,6个状态寄存器,R13堆栈指针sp,R14返回指针,R15为PC指针, cpsr_c代表的是这32位中的 ...
- ASM:《X86汇编语言-从实模式到保护模式》5-7章:汇编基础
第5-7章感觉是这一本书中比较奇怪的章节,可能是作者考虑到读者人群水平的差异,故意由浅入深地讲如何在屏幕上显示字符和使用mov,jmp指令等等,但是这样讲的东西有点重复,而且看了第六,第七章以后,感觉 ...
- 【嵌入式开发】ARM 芯片简介 (ARM芯片类型 | ARM处理器工作模式 | ARM 寄存器 | ARM 寻址)
: 12MHz 晶振 对应 405 ~ 532 MHz 处理速度; -- : 16K 指令缓存, 16K 数据缓存; -- : 32KB 指令缓存, 32KB 数据缓存; (3) 内存接口对比 : 提 ...
- arm寄存器解析
寒假闲来无事准备将自己的走过的arm之路总结一下,今天就先从arm的寄存器说起吧,欢迎各位拍砖. 要介绍arm寄存器之前我们要先了解一下arm处理器的工作模式: Arm处理器有七种工作模式,为的是形成 ...
随机推荐
- [转]JQuery 如何选择带有多个class的元素
比如下面代码需要选择同时带有这几个class的元素,怎么写? 1 <div class="modal fade in"></div> A: 1. 依次过滤 ...
- Gstreamer编程
一.简介 GStreamer是一个开源的多媒体框架库.利用它,可以构建一系列的媒体处理模块,包括从简单的ogg播放功能到复杂的音频(混音)和视频(非线性编辑)的处理.应用程序可以透明的利用解码和过滤技 ...
- Linux minicom命令
一.简介 minicom是Linux下的超级终端,与Windows下的超级终端功能相似,可以通过串口控制外部的硬件设备,可以用于管理和控制嵌入式设备 二.安装 1)yum安装 yum install ...
- Luogu 1641 [SCOI2010]生成字符串
结果和dp没有一点关系…… 30分算法:设$f_{i, j}$表示已经选了$i$个并且有$j$个是白色的状态数,转移显然,最后答案就是$f_{n + m, m}$,时间复杂度$O(n^{2})$. 1 ...
- 1.初学c++,比较困惑的问题。
1.c++是一门实用的语言吗? c++是一个实用的工具,它很有用. 在工业软件世界中,c++被视为坚实和成熟的主流工具.它具有广泛的行业支持和好批. 2.面向对象编程在c++中的作用? 我们要开发一个 ...
- Entity Framework Tutorial Basics(10):Entity Lifecycle
Entity Lifecycle: Before we work on CRUD operation (Create, Read, Update, Delete), it's important to ...
- CodeForces 384E Propagating tree (线段树+dfs)
题意:题意很简单么,给定n个点,m个询问的无向树(1为根),每个点的权值,有两种操作, 第一种:1 x v,表示把 x 结点加上v,然后把 x 的的子结点加上 -v,再把 x 的子结点的子结点加上 - ...
- HDU 3001 Travelling (状压DP + BFS)
题意:有一个人要去旅游,他想要逛遍所有的城市,但是同一个城市又不想逛超过2次.现在给出城市之间的来往路费,他可以选择任意一个点为起点. 问逛遍所有城市的最低路费是多少. 析:用三进制表示每个城市的访问 ...
- web.xml文件的Url-pattern 节点配置
- iOS模拟器录屏转gif神器
我发现苹果的Quick Time Player用来录屏就挺好用的.打开后选择 文件 - 新建屏幕录制 - 点击录制按钮, 划出要录制的模拟器窗体 - 点击录制就可以了. 录制成mov格式还要再转成gi ...