倍福TwinCAT(贝福Beckhoff)常见问题(FAQ)-如何获取标准驱动器扭矩值获取电流值
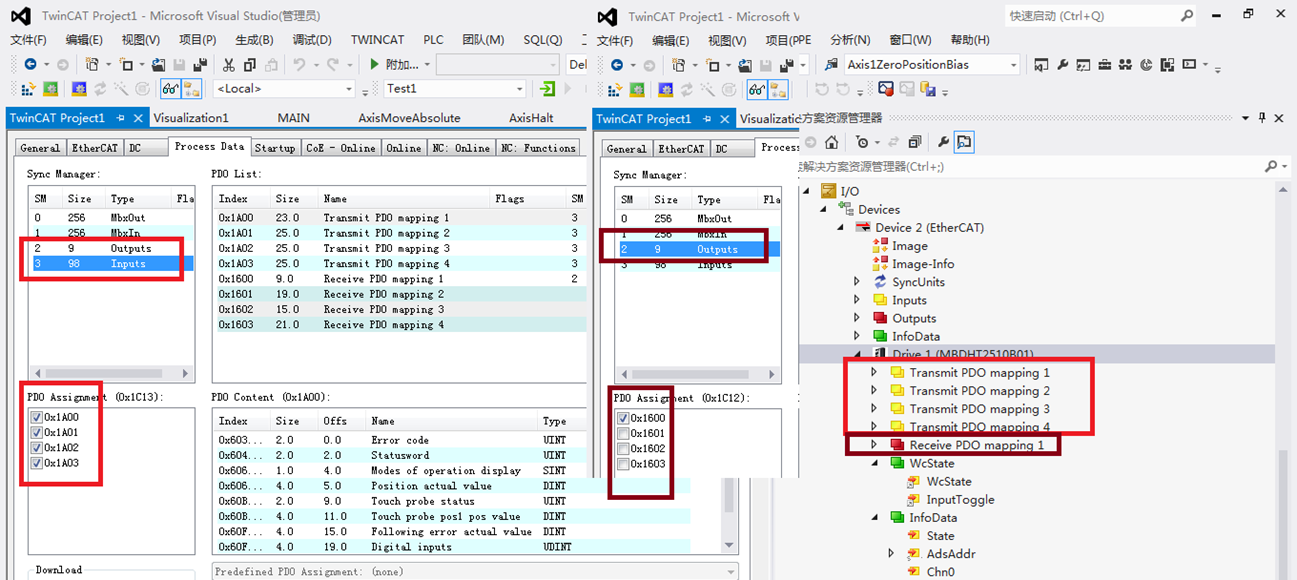
双击某个驱动器(以松下伺服驱动器为例),在Process Data中,注意默认显示了PDO mapping1的数据(Error code, status word等)

注意左侧,2和3分别表示了与驱动器的所有数据输入和输出,如果我选中2 Output之后,勾选四个选项,那么就会有PDO mapping1到4,当然如果3 Input只勾选了第一项,那么就只会有Receive PDO mapping1
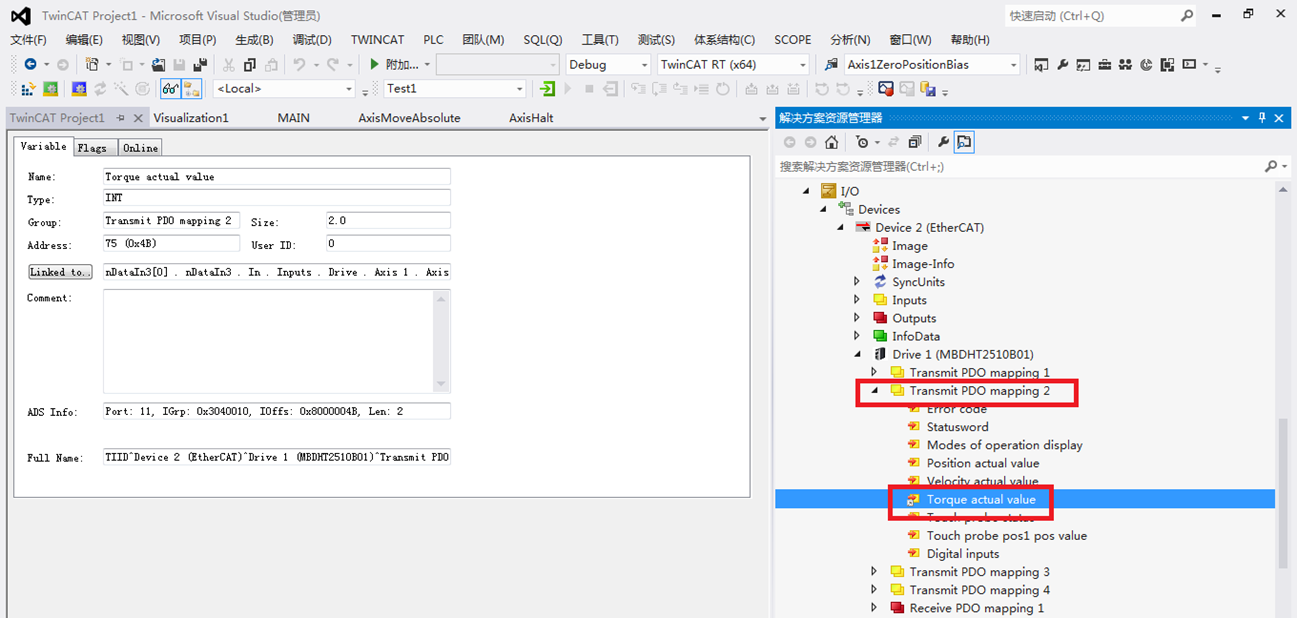
在PDO mapping2中可以找到Torque actual value
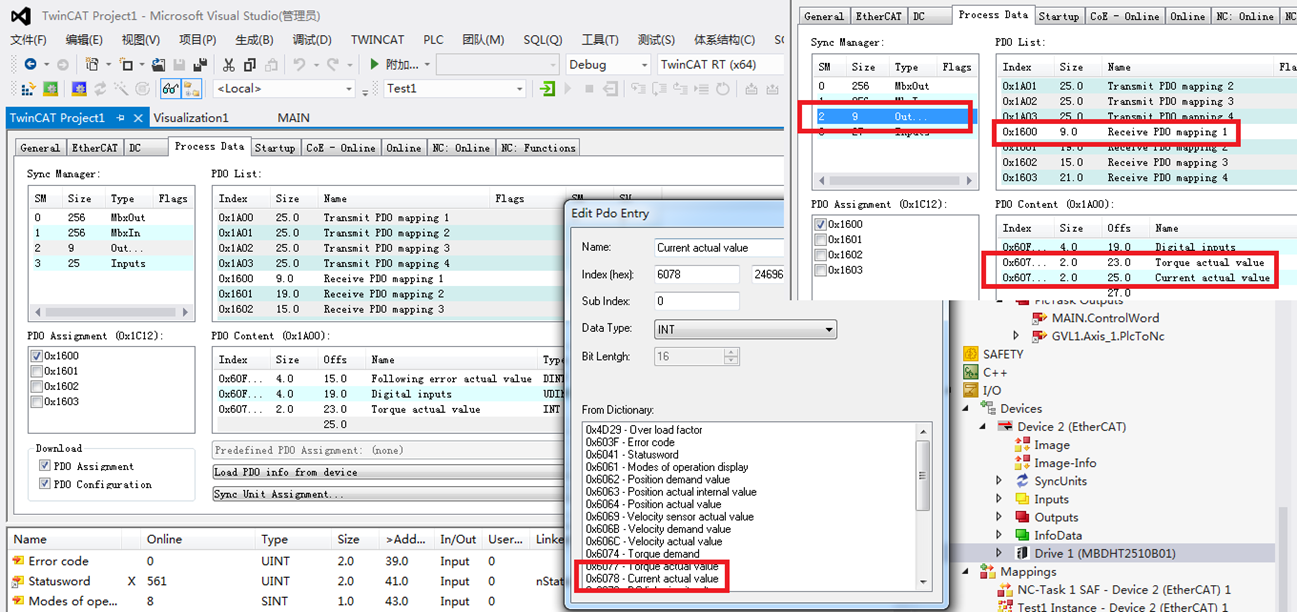
我们还是输入和输出都只勾选1项,在Receive PDO mapping1中最下面PDO Content鼠标右击Insert,然后选择Torque actual value,类型会自动变成INT,Index也会自动修改

提示更新数据,更新之后在PDO mapping1中已经可以看到要监控的扭矩

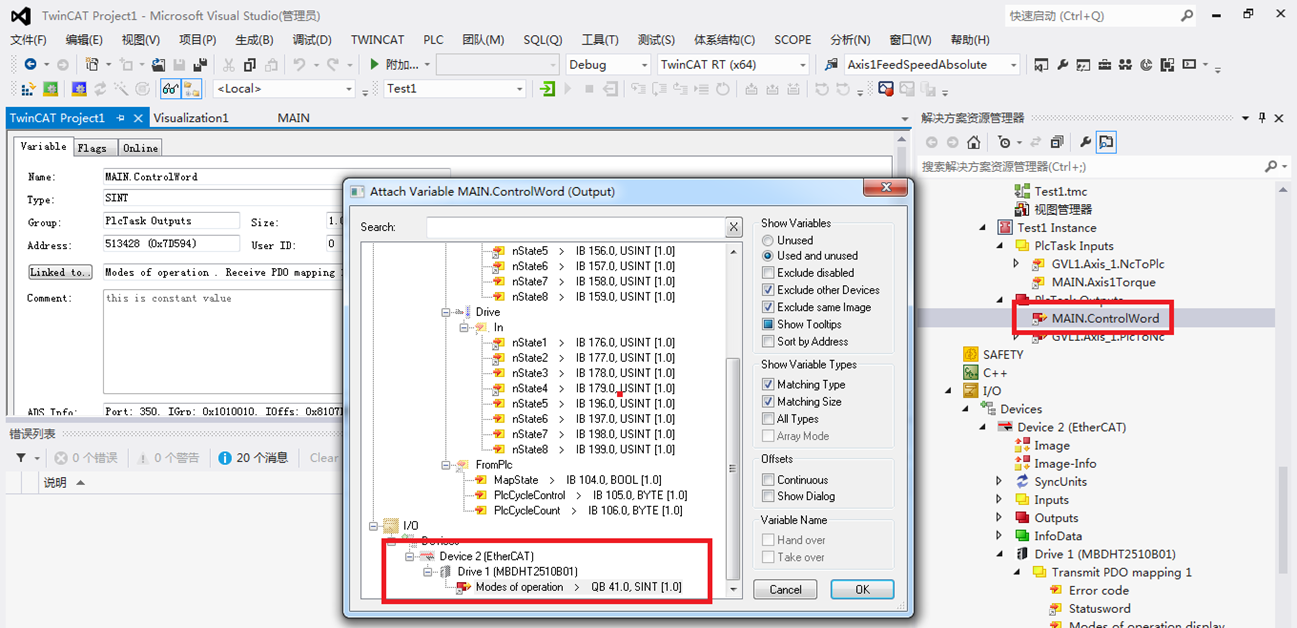
首先在MAIN程序中该定义输入输出类型变量(AT%I是输入,AT%Q是输出,如果你不确定是输入还是输出也可以先都定义一个,然后F6刷新,看在PLC的Instance中新增的变量)

双击这个变量,Linked to弹出窗口中选择驱动器的扭矩值即可(Matching Type和Matching Size是一定的,如果找不到扭矩变量就说明你定义的类型不对,PLC的输入去链接驱动器的输出,反过来也是一样)

比如说我双击PLC的某个输出变量,就只能找到驱动器的很少的几个变量了,不包括扭矩变量
用同样的方法也可以监控实际的电流值,但是这两个数值貌似都是一样的
更多教学视频和资料下载,欢迎关注以下信息:
我的优酷空间:
http://i.youku.com/acetaohai123

我的在线论坛:
http://csrobot.gz01.bdysite.com/

问题交流:
QQ:910358960
倍福TwinCAT(贝福Beckhoff)常见问题(FAQ)-如何获取标准驱动器扭矩值获取电流值的更多相关文章
- 倍福TwinCAT(贝福Beckhoff)常见问题(FAQ)如何修改标准驱动器编码器分辨率
在某个轴的Enc上双击,可以修改Scaling Factor Numerator 更多教学视频和资料下载,欢迎关注以下信息: 我的优酷空间: http://i.youku.com/acetao ...
- 倍福TwinCAT(贝福Beckhoff)常见问题(FAQ)-T_AmsNetID是什么
该参数是包含六个数字类似于IP地址的字符串形式,例如"1.1.1.2.7.1",如果为空字符串,则默认使用本机的AmsNetID 你可以右击贝福的图标,然后点击About查看当前本 ...
- 倍福TwinCAT(贝福Beckhoff)常见问题(FAQ)-TwinCAT自带的找原点功能块MC_Home怎么用
对于相对编码器类型轴(包括虚拟轴),可以使用贝福提供的找原点功能块MC_Home. HomingMode是指机器在往前跑的时候(30单位/s的默认速度),当碰到阻挡,则会有一个布尔值从FALSE改 ...
- 倍福TwinCAT(贝福Beckhoff)常见问题(FAQ)-报错0X4655,18005错误怎么办
首先确认驱动器没有报错(如果驱动器报错,请先解决绝对值编码器的清除多圈数据问题) 报错一般上使能就会报错,没法测试运转,而且不管是用贝福自带的NC功能还是自己写的都会一样的效果 请删除在贝福的Et ...
- 倍福TwinCAT(贝福Beckhoff)基础教程1.2 TwinCAT安装配置
由于TC2和TC3都有可能用到,个人推荐都安装,但是注意必须是先安装的TwinCAT2,然后安装TwinCAT3,如果反了可能两个都没法用(打开TcSwitchRuntime提示Both TwinCA ...
- 倍福TwinCAT(贝福Beckhoff)应用教程13.1 TwinCAT控制松下伺服 NC高级
本节主要演示了使用自定义函数实现电机的运动(梯形曲线和S曲线都有实现),这里的JOG+和JOG-,针对单个关节实现了PTP的运动(跟贝福的MoveAbsolute功能块实现效果一致),在此没有介绍运动 ...
- 倍福TwinCAT(贝福Beckhoff)应用教程12.3 TwinCAT控制松下伺服 NC进阶
在前面一节,我们简单介绍了通过PLC+HMI实现完整控制松下伺服的上使能-运动,采集位置,速度等功能,这里我们会大量简化用到的贝福功能块(为了更加实用).首先依然是对单个轴的封装,我们之前的做法,例如 ...
- 倍福TwinCAT(贝福Beckhoff)应用教程12.2 TwinCAT控制松下伺服 NC初步
在前面我们已经学会了使用贝福自带的调试软件完成试运行,接下来是使用TWINCAT PLC实现这个功能,右击PLC添加一个PLC项目 在VISUs上右击添加一个HMI人机界面 目前PLC程序和人 ...
- 倍福TwinCAT(贝福Beckhoff)应用教程12.1 TwinCAT控制松下伺服 连接和试运行
首先是用松下伺服自带的软件可以测试运行(驱动器,电机都连接好,然后用USB线连接到松下伺服驱动器的X1口),打开调试软件会自动提示连接到伺服 一般需要对驱动器清除绝对值编码器数据(驱动器可能报错4 ...
随机推荐
- [ 总结 ] Linux系统测试硬盘I/O
检测硬盘I/O相对来说还是一个比较抽象的概念,但是对系统性能的影响还是至关重要的. (1)使用hdparm命令检测读取速度: hdparm命令提供了一个命令行的接口用于读取和设置IDE和SCSI ...
- Java上传文件格式判断
判断用户上传文件的合法性仅仅通过后缀名是完全不够的,谁也不知道后缀名是否被更改,服务器保存一个不知道真实类型的文件有极大的风险. 因此需要后台进行进一步的文件类型校验,这里有两种情况: 1)一般的文件 ...
- 理解Java中【包】的概念
Java中用package关键字定义一个包,下面通过几个实验,理解Java中的包的概念和作用. 实验1:先看一个无包的情形 在G盘下新建一个Test.java,如图1: 写下面这些代码 <spa ...
- Spark GraphX宝刀出鞘,图文并茂研习图计算秘笈与熟练的掌握Scala语言【大数据Spark实战高手之路】
Spark GraphX宝刀出鞘,图文并茂研习图计算秘笈 大数据的概念与应用,正随着智能手机.平板电脑的快速流行而日渐普及,大数据中图的并行化处理一直是一个非常热门的话题.图计算正在被广泛地应用于社交 ...
- Vue CLI3 关闭热替换后出现的warning
用vue cli3做项目的时候如果开启了typescript的严格模式,在dev server热替换的时候往往就会打出一大堆warning,严重的影响了编译效率.官方并没有提供关闭warning的ap ...
- Nodejs微信开发
因为使用了Bot Framework开发了一个小功能,它目前支持了Skype\Teams\Slack等,但在国内来讲,微信还是一个比较流行的软件,所以需要接上微信 原来开发Bot的时候使用的是.Net ...
- Django中遇到的mysql问题
最近在用Django写个网站,连接mysql的时候出现了几个问题,总结一下 写好setting.py和models.py后,syncdb都没什么问题,在测试后台发表文章的时候就出错了,本来是测试mar ...
- HDU 1285 确定比赛名次【字典序最小的拓扑排序 + 优先队列】
确定比赛名次 Time Limit: 2000/1000 MS (Java/Others) Memory Limit: 65536/32768 K (Java/Others) Total Submis ...
- NOIP2018提高组模拟题(五)
字符串(string) Description 小林与亮亮正在做一个游戏.小林随意地写出一个字符串,字符串只由大写 字母组成,然后指定一个非负整数 m,亮亮可以进行至多 m 次操作,每次操作 为交换相 ...
- 在小程序开发中使用 npm
微信小程序在发布之初没有对 npm 的支持功能,这也是目前很多前端开发人员在熟悉了 npm 生态环境后,对微信小程序诟病的地方. 微信小程序在 2.2.1 版本后增加了对 npm 包加载的支持,使得小 ...