python opencv3 基于ORB的特征检测和 BF暴力匹配 knn匹配 flann匹配
git:https://github.com/linyi0604/Computer-Vision
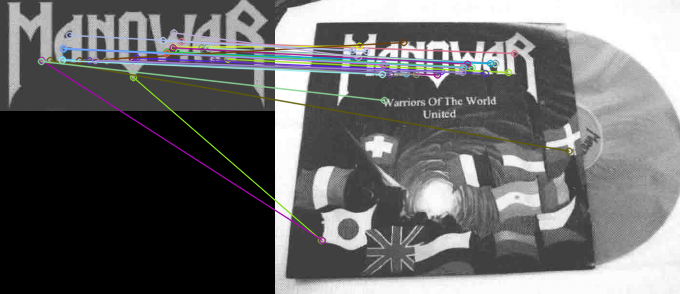
bf暴力匹配:
# coding:utf-8 import cv2 """
orb特征检测和匹配
两幅图片分别是 乐队的logo 和包含该logo的专辑封面
利用orb进行检测后进行匹配两幅图片中的logo """
# 按照灰度图像的方式读入两幅图片
img1 = cv2.imread("../data/logo1.png", cv2.IMREAD_GRAYSCALE)
img2 = cv2.imread("../data/album1.png", cv2.IMREAD_GRAYSCALE) # 创建ORB特征检测器和描述符
orb = cv2.ORB_create()
# 对两幅图像检测特征和描述符
keypoint1, descriptor1 = orb.detectAndCompute(img1, None)
keypoint2, descriptor2 = orb.detectAndCompute(img2, None)
"""
keypoint 是一个包含若干点的列表
descriptor 对应每个点的描述符 是一个列表, 每一项都是检测到的特征的局部图像 检测的结果是关键点
计算的结果是描述符 可以根据监测点的描述符 来比较检测点的相似之处 """
# 获得一个暴力匹配器的对象
bf = cv2.BFMatcher(cv2.NORM_HAMMING, crossCheck=True)
# 利用匹配器 匹配两个描述符的相近成都
maches = bf.match(descriptor1, descriptor2)
# 按照相近程度 进行排序
maches = sorted(maches, key=lambda x: x.distance)
# 画出匹配项
img3 = cv2.drawMatches(img1, keypoint1, img2, keypoint2, maches[: 30], img2, flags=2) cv2.imshow("matches", img3)
cv2.waitKey()
cv2.destroyAllWindows()
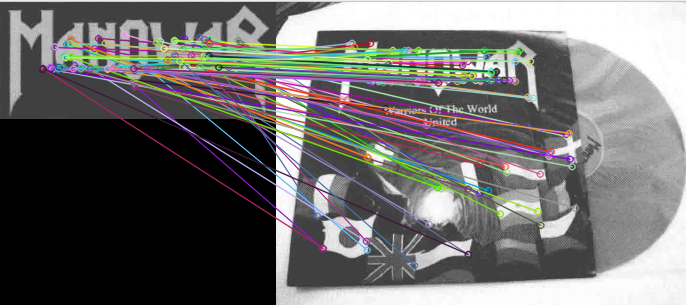
knn匹配:
# coding:utf-8 import cv2 # 按照灰度图像读入两张图片
img1 = cv2.imread("../data/logo1.png", cv2.IMREAD_GRAYSCALE)
img2 = cv2.imread("../data/album1.png", cv2.IMREAD_GRAYSCALE) # 获取特征提取器对象
orb = cv2.ORB_create()
# 检测关键点和特征描述
keypoint1, desc1 = orb.detectAndCompute(img1, None)
keypoint2, desc2 = orb.detectAndCompute(img2, None)
"""
keypoint 是关键点的列表
desc 检测到的特征的局部图的列表
"""
# 获得knn检测器
bf = cv2.BFMatcher(cv2.NORM_HAMMING, crossCheck=True)
matches = bf.knnMatch(desc1, desc2, k=1)
"""
knn 匹配可以返回k个最佳的匹配项
bf返回所有的匹配项
"""
# 画出匹配结果
img3 = cv2.drawMatchesKnn(img1, keypoint1, img2, keypoint2, matches, img2, flags=2)
cv2.imshow("matches", img3)
cv2.waitKey()
cv2.destroyAllWindows()
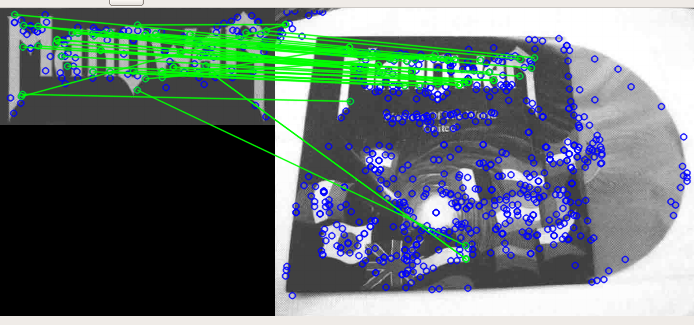
FLANN匹配:
# coding:utf-8 import cv2 """
FLANN是类似最近邻的快速匹配库
它会根据数据本身选择最合适的算法来处理数据
比其他搜索算法快10倍
"""
# 按照灰度图片读入
img1 = cv2.imread("../data/logo1.png", cv2.IMREAD_GRAYSCALE)
img2 = cv2.imread("../data/album1.png", cv2.IMREAD_GRAYSCALE)
# 创建sift检测器
sift = cv2.xfeatures2d.SIFT_create()
# 查找监测点和匹配符
kp1, des1 = sift.detectAndCompute(img1, None)
kp2, des2 = sift.detectAndCompute(img2, None)
"""
keypoint是检测到的特征点的列表
descriptor是检测到特征的局部图像的列表
"""
# 获取flann匹配器
FLANN_INDEX_KDTREE = 0
indexParams = dict(algorithm=FLANN_INDEX_KDTREE, trees=5)
searchParams = dict(checks=50)
flann = cv2.FlannBasedMatcher(indexParams, searchParams)
# 进行匹配
matches = flann.knnMatch(des1, des2, k=2)
# 准备空的掩膜 画好的匹配项
matchesMask = [[0, 0] for i in range(len(matches))] for i, (m, n) in enumerate(matches):
if m.distance < 0.7*n.distance:
matchesMask[i] = [1, 0] drawPrams = dict(matchColor=(0, 255, 0),
singlePointColor=(255, 0, 0),
matchesMask=matchesMask,
flags=0)
# 匹配结果图片
img3 = cv2.drawMatchesKnn(img1, kp1, img2, kp2, matches, None, **drawPrams) cv2.imshow("matches", img3)
cv2.waitKey()
cv2.destroyAllWindows()
python opencv3 基于ORB的特征检测和 BF暴力匹配 knn匹配 flann匹配的更多相关文章
- 第十六节、基于ORB的特征检测和特征匹配
之前我们已经介绍了SIFT算法,以及SURF算法,但是由于计算速度较慢的原因.人们提出了使用ORB来替代SIFT和SURF.与前两者相比,ORB有更快的速度.ORB在2011年才首次发布.在前面小节中 ...
- [python 译] 基于面向对象的分析和设计
[python 译] 基于面向对象的分析和设计 // */ // ]]> [python 译] 基于面向对象的分析和设计 Table of Contents 1 原文地址 2 引言 2.1 ...
- python中基于descriptor的一些概念
python中基于descriptor的一些概念(上) 1. 前言 2. 新式类与经典类 2.1 内置的object对象 2.2 类的方法 2.2.1 静态方法 2.2.2 类方法 2.3 新式类(n ...
- 机器学习经典算法详解及Python实现--基于SMO的SVM分类器
原文:http://blog.csdn.net/suipingsp/article/details/41645779 支持向量机基本上是最好的有监督学习算法,因其英文名为support vector ...
- python实现基于CGI的Web应用
python实现基于CGI的Web应用 本文用一个“网上书店”的web应用示例,简要介绍如何用Python实现基于CGI标准的Web应用,介绍python的cgi模块.cigtb模块对编写CGI脚本提 ...
- 基于ORB的LinearBlend融合
// L14//基于ORB实现线性融合#include "stdafx.h"#include <vector>#include <opencv2/core.hpp ...
- python中基于descriptor的一些概念(上)
@python中基于descriptor的一些概念(上) python中基于descriptor的一些概念(上) 1. 前言 2. 新式类与经典类 2.1 内置的object对象 2.2 类的方法 2 ...
- python中基于descriptor的一些概念(下)
@python中基于descriptor的一些概念(下) 3. Descriptor介绍 3.1 Descriptor代码示例 3.2 定义 3.3 Descriptor Protocol(协议) 3 ...
- 用Python实现基于Hadoop Stream的mapreduce任务
用Python实现基于Hadoop Stream的mapreduce任务 因为Hadoop Stream的存在,使得任何支持读写标准数据流的编程语言实现map和reduce操作成为了可能. 为了方便测 ...
随机推荐
- 20、List集合中特有的方法
List里面的特有方法简介 List中除了Collection里面的方法以外,内部还有一些方法,通过这些方法,开发者可以更方便的操作List接口的实现类. package com.monkey1024 ...
- Python概念-__del__的悲伤
__del__了不得了,这个是在回收实例化对象时触发执行的方法 每当del 实例化对象时会触发 或者是程序结束时,会触发,总之就是实例化对象失效时都会执行__del__方法 代码示例: class F ...
- C# TreeView 自定义显示checkbox
本项目需要对TreeView进行定制,要求比较简单,主要要求如下: Winform中TreeView控件默认只支持所有级别的CheckBox显示或者不显示,不能控制制定Level的树节点显示 效果如下 ...
- js数据类型隐式转换问题
js数据类型隐式转换 ![] == false //true 空数组和基本类型转换,会先[].toString() 再继续比较 ![] == [] //true ![] //false [] == [ ...
- 支付宝hr终面,忐忑的等待结果
上周一,内推网投了支付宝上海的 高级java软件开发工程师:阿里效率就是高,不到30分钟电话就过来了!约的上周五14:00面试:上周五技术面了2轮,第一轮是主管面试,貌似给了p6;第二轮部门总监面试, ...
- imperva 网管替换
事情是这样的 某某银行的imperva DAM审计设备出现蜂鸣的响声.经检查电源没有问题,怀疑是硬盘坏了 . 然后我就去底层查看 运行命令 :impctl platform storage raid ...
- 04 Go 1.4 Release Notes
Go 1.4 Release Notes Introduction to Go 1.4 Changes to the language For-range loops Method calls on ...
- java基础34 泛型的使用
本文知识点(目录): 1.泛型的好处 2.泛型在集合中的常见应用(这里只用String类型举例) 3.在泛型中是不能使用基本数据类型,如果需要使用基本数据类型,那么就使用基本数据类型对应的 ...
- Oracle学习笔记:decode函数
decode函数主要作用:将查询结果翻译成其他值(即以其他形式变现出来) 使用方法: SELECT DECODE(colunm_name,值1,翻译值1,值2,翻译值2……值n,翻译值n,缺省值) F ...
- Effective STL 笔记 -- Item 9: Choose carefully among erasing options
假设有一个容器中存放着 int ,Container<int> c, 现在想从其中删除数值 1963,可以有如下方法: 1: c.erase(remove(c.begin(), c.end ...