在 raspberry pi pico 上体验 MicroPython
raspberry pi pico 官方提供 2 种开发方式,其中一种是使用 python3 开发,树莓派提供了 MicroPython 固件,把这个固件烧录进去,就可以 在 pico 上跑 python3 脚本。
1、MicroPython 相关资源
用 python 开发,官网能找到的资源有:
1、MicroPython 固件
已经编译好的固件:getting-started这里可以下载到
源码:micropython‘s github,micropython已经对 RP2040 进行支持

2、文档
3、MicroPython 例程
raspberrypi 官方 github 上有相关例程:pico-micropython-examples
2、下载、烧录 MicroPython 固件
树莓派官网提供了编译好的 MicroPython 固件,也可以自己编译, Raspberry Pi Pico Python SDK 给出了编译教程。
这里直接使用官方编译好的固件,下载下来是这样的:

先按住板子上的按键,然后连上电脑,等电脑出现名字为 RPI-RP2的磁盘时,把下载到的固件拷贝到该磁盘,等拷贝完成就烧录好了,烧录完,设备会自动重新启动,然后我的电脑上出现了这个:
设备管理器中多了个 COM 口:
PC上可以使用串口终端通过该 COM 口操作 pico。
3、使用 MobaXterm 操作 pico
我是用的串口终端是 MobaXterm,MobaXterm 什么?MobaXterm 官网的描述是:
Enhanced terminal for Windows with X11 server, tabbed SSH client, network tools and much more
可以创建SSH、Telnet 、串口终端等等,功能释放强大,有免费版、也有收费的,免费的够用了。
创建一个串口终端连接跑 MicroPython 的 pico,选择对应的 COM 口,波特率115200,如下:
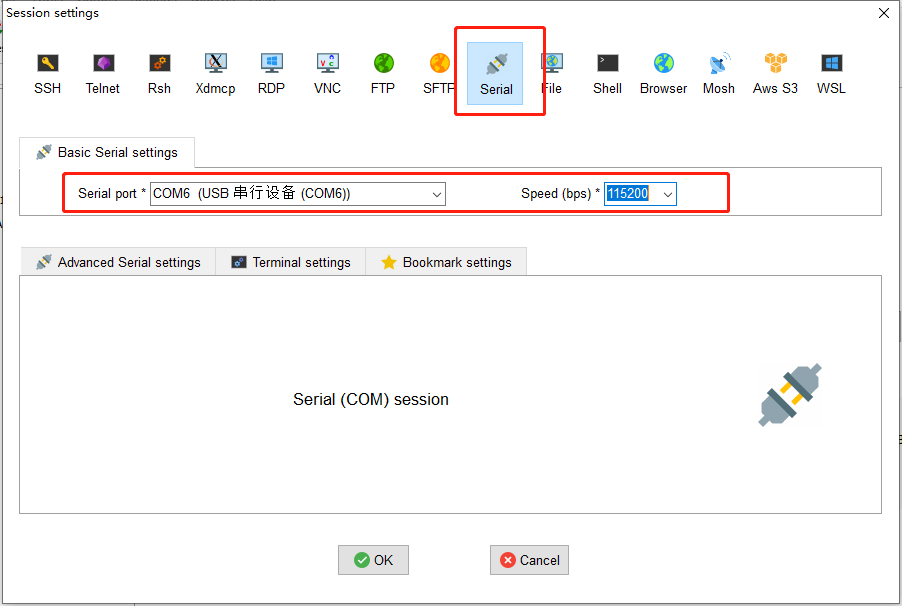
点击 OK 后,界面乌漆嘛黑,什么都没有,需要按下回车,然后就可以进行操作了,如下:
4、点灯
点下灯,从原理图看,是 GPIO25 控制 LED:

在MobaXterm 执行一下 python 代码,就可以点亮板子上的 LED 了:
from machine import Pin
led = Pin(25, Pin.OUT)
led.value(1)
5、附上 pico 跑 MicroPython 是 USB 相关信息
[Port2] : USB Composite Device
---===>Device Information<===---
English product name: "Board in FS mode"
ConnectionStatus:
Current Config Value: 0x01 -> Device Bus Speed: Full
Device Address: 0x15
Open Pipes: 3
===>Endpoint Descriptor<===
bLength: 0x07
bDescriptorType: 0x05
bEndpointAddress: 0x81 -> Direction: IN - EndpointID: 1
bmAttributes: 0x03 -> Interrupt Transfer Type
wMaxPacketSize: 0x0008 = 0x08 bytes
bInterval: 0x10
===>Endpoint Descriptor<===
bLength: 0x07
bDescriptorType: 0x05
bEndpointAddress: 0x02 -> Direction: OUT - EndpointID: 2
bmAttributes: 0x02 -> Bulk Transfer Type
wMaxPacketSize: 0x0040 = 0x40 bytes
bInterval: 0x00
===>Endpoint Descriptor<===
bLength: 0x07
bDescriptorType: 0x05
bEndpointAddress: 0x82 -> Direction: IN - EndpointID: 2
bmAttributes: 0x02 -> Bulk Transfer Type
wMaxPacketSize: 0x0040 = 0x40 bytes
bInterval: 0x00
===>Device Descriptor<===
bLength: 0x12
bDescriptorType: 0x01
bcdUSB: 0x0200
bDeviceClass: 0xEF -> This is a Multi-interface Function Code Device
bDeviceSubClass: 0x02 -> This is the Common Class Sub Class
bDeviceProtocol: 0x01 -> This is the Interface Association Descriptor protocol
bMaxPacketSize0: 0x40 = (64) Bytes
idVendor: 0x2E8A = Vendor ID not listed with USB.org as of 03-19-2008
idProduct: 0x0005
bcdDevice: 0x0100
iManufacturer: 0x01
English (United States) "MicroPython"
iProduct: 0x02
English (United States) "Board in FS mode"
iSerialNumber: 0x03
English (United States) "000000000000"
bNumConfigurations: 0x01
===>Configuration Descriptor<===
bLength: 0x09
bDescriptorType: 0x02
wTotalLength: 0x004B -> Validated
bNumInterfaces: 0x02
bConfigurationValue: 0x01
iConfiguration: 0x00
bmAttributes: 0xA0 -> Bus Powered
MaxPower: 0x7D = 250 mA
===>IAD Descriptor<===
bLength: 0x08
bDescriptorType: 0x0B
bFirstInterface: 0x00
bInterfaceCount: 0x02
bFunctionClass: 0x02 -> This is Communications (CDC Control) USB Device Interface Class
bFunctionSubClass: 0x02
bFunctionProtocol: 0x00
iFunction: 0x00
===>Interface Descriptor<===
bLength: 0x09
bDescriptorType: 0x04
bInterfaceNumber: 0x00
bAlternateSetting: 0x00
bNumEndpoints: 0x01
bInterfaceClass: 0x02 -> This is Communications (CDC Control) USB Device Interface Class
bInterfaceSubClass: 0x02
bInterfaceProtocol: 0x00
CAUTION: This may be an invalid bInterfaceProtocol
iInterface: 0x04
English (United States) "Board CDC"
-> This is a Communications (CDC Control) USB Device Interface Class
===>Descriptor Hex Dump<===
bLength: 0x05
bDescriptorType: 0x24
05 24 00 20 01
-> This is a Communications (CDC Control) USB Device Interface Class
===>Descriptor Hex Dump<===
bLength: 0x05
bDescriptorType: 0x24
05 24 01 00 01
-> This is a Communications (CDC Control) USB Device Interface Class
===>Descriptor Hex Dump<===
bLength: 0x04
bDescriptorType: 0x24
04 24 02 02
-> This is a Communications (CDC Control) USB Device Interface Class
===>Descriptor Hex Dump<===
bLength: 0x05
bDescriptorType: 0x24
05 24 06 00 01
===>Endpoint Descriptor<===
bLength: 0x07
bDescriptorType: 0x05
bEndpointAddress: 0x81 -> Direction: IN - EndpointID: 1
bmAttributes: 0x03 -> Interrupt Transfer Type
wMaxPacketSize: 0x0008 = 0x08 bytes
bInterval: 0x10
===>Interface Descriptor<===
bLength: 0x09
bDescriptorType: 0x04
bInterfaceNumber: 0x01
bAlternateSetting: 0x00
bNumEndpoints: 0x02
bInterfaceClass: 0x0A -> This is a CDC Data USB Device Interface Class
bInterfaceSubClass: 0x00
bInterfaceProtocol: 0x00
CAUTION: This may be an invalid bInterfaceProtocol
iInterface: 0x00
===>Endpoint Descriptor<===
bLength: 0x07
bDescriptorType: 0x05
bEndpointAddress: 0x02 -> Direction: OUT - EndpointID: 2
bmAttributes: 0x02 -> Bulk Transfer Type
wMaxPacketSize: 0x0040 = 0x40 bytes
bInterval: 0x00
===>Endpoint Descriptor<===
bLength: 0x07
bDescriptorType: 0x05
bEndpointAddress: 0x82 -> Direction: IN - EndpointID: 2
bmAttributes: 0x02 -> Bulk Transfer Type
wMaxPacketSize: 0x0040 = 0x40 bytes
bInterval: 0x00
在 raspberry pi pico 上体验 MicroPython的更多相关文章
- 上手 Raspberry Pi Pico
什么是 PICO Raspberry Pi Pico 是树莓派推出的一块基于 Arm Cortex-M0+ 内核的 MCU 的开发板,使用的 MCU 是树莓派自己研发的 Arm Cortex-M0+ ...
- Raspberry PI 2上的802.11ac网卡驱动编译
Raspberry PI 2上的802.11ac网卡驱动编译 最近在树莓派2上折腾视频,用来做FPV,但是发现2.4G的控会严重干扰2.4G WIFI,在开控的时候我的台式机+外置USB网卡都频频掉线 ...
- 在Raspberry Pi 3B+上安装Windows 10 IoT
下载 进入树莓派下载页面,当前网址https://www.raspberrypi.org/downloads/ 选择Windows 10 IoT Core,当前网址https://docs.micro ...
- 树莓派PICO刷入MicroPython内核的两种方式
一.MicroPython简介 MicroPython 是 Python 3编程语言的精简高效实现,其中包括 Python 标准库的一小部分,并且经过优化,可在微控制器和受限环境中运行. 可以在 25 ...
- Raspberry Pi 学习笔记之一
记录几个搭建服务器教程: [教程] 将树莓派变成网络打印机服务器(更新PC和手机端设置)!http://www.eeboard.com/bbs/thread-8818-1-1.html[心得] [分享 ...
- 用树莓派Raspberry Pi和Micro:bit做一个自拍器
在这个项目中,我们将使用Python来构建一个由Micro:bit触发树莓派Raspberry Pi和相机模块的自拍器.这是开始使用硬件和简单文本编程的好方法. 我们将学习: 如何设置Raspberr ...
- (0)开始 Raspberry Pi 项目前需要知道的 10 件事
https://www.digikey.cn/zh/articles/techzone/2017/feb/10-things-to-know-before-starting-a-raspberry-p ...
- 2016 最新的 树莓派3 Raspberry Pi 3 上手评测 图解教程 新手必看!(VNC 安装,启动,关闭)
1.png . 官方教程: INSTALLING OPERATING SYSTEM IMAGES: https://www.raspberrypi.org/documentation/installa ...
- 【树莓派】【转】将树莓派Raspberry Pi设置为无线路由器(WiFi热点AP,RTL8188CUS芯片)
下文为转载,文章转自:http://wangye.org/blog/archives/845/,仅供本次学习实践参考. 最近又开始折腾起Raspberry Pi来了,因为某处上网需要锐捷拨号,于是我就 ...
随机推荐
- 【Docker】7. 镜像-加载原理、分层原理、commit镜像
一.什么是镜像 镜像是一种轻量级.可执行的独立软件包,用来打包软件运行环境和基于运行环境开发的软件. 它包含运行某个软件所需的所有内容,包括代码.运行时环境.库.环境变量和配置文件. 所有的应用,直接 ...
- multiset容器erase函数的误用
<从缺陷中学习C/C++>第3章库函数问题,本章主要介绍库函数的使用中会遇到的问题.使用库函数可以降低软件开发的难度,提高代码编写的效率.本节为大家介绍multiset容器erase函数的 ...
- java基础——初识面向对象
面向对象 面向过程&面向对象 面向过程思想 步骤请简单:第一步做什么,第一步做什么 面向过程适合处理一些较为简单的东西 面向对象思想 物以类聚,分类的思维模式,思考的问题首先会解决问题需要哪些 ...
- [刷题] 455 Assign Cookies
要求 贪心算法的关键:判断问题是否可以用贪心算法解决 给小朋友们分饼干,每个小朋友"贪心指数"为g(i),饼干大小值s(i) g(i):小朋友需要的饼干大小的最小值 若s(j)&g ...
- 在 Apache 上使用网络安全服务(NSS)实现 HTTPS--RHCE 系列(八)
在 Apache 上使用网络安全服务(NSS)实现 HTTPS--RHCE 系列(八) 发布:linux培训 来源:Linux认证 时间:2015-12-21 15:26 分享到: 达内lin ...
- otter源码解读(一)
概览 lib存放的是项目依赖包,由于项目用到的包比较杂,可能有的包已经不在maven仓库中提供了,所以提供了一个lib包,执行里面的install命令,就可以把包安装到本地maven仓库. manag ...
- Centos7.3 进入救援模式,解决虚拟机开机引导只能看到一个横杠
问题描述:搭建在CAS服务器中的虚拟机开机后只能看到一个横杠,因为开发同事的一些操作使glibc库/lib64/libc.so.6软链接失效 1.libc.so.6 是c运行时库 glibc的软链接, ...
- 10.5 arp:管理系统的arp缓存
arp命令 用于操作本机的arp缓存区,它可以显示arp缓存区中的所有条目.删除指定的条目或者添加静态的IP地址与MAC地址的对应关系. 什么是arp?即地址解析协议(ARP,Address ...
- 使用vue-i18n实现中英文切换(内含动态属性的绑定)
最近做学生管理系统,因为有国外的学生,所以要进行中英文切换,查了查Vue中使用vue-i18n插件能够实现网页的中英文切换,学习内容如下: 一.下载vue-i18n插件 npm install vue ...
- NCF 如何通过WebApi实现前后端分离
简介 昨天参加了<Best Of Microsoft Build>上海专场 NCF 模块化 WebApi 系统开发 + 容器化部署实战 的小伙伴们,昨天有些没有记住的,今天我在这里给大家把 ...