endless 如何实现不停机重启 Go 程序?
转载请声明出处哦~,本篇文章发布于luozhiyun的博客:https://www.luozhiyun.com/archives/584
前几篇文章讲解了如何实现一个高效的 HTTP 服务,这次我们来看一下如何实现一个永不不停机的 Go 程序。
前提
事情是这样的,在一天风和日丽的周末,我正在看 TiDB 源码的时候,有一位胖友找到我说,Go 是不是每次修改都需要重启才行?由于我才疏学浅不知道有不停机重启这个东西,所以回答是的。然后他说,那完全没有 PHP 好用啊,PHP 修改逻辑完之后直接替换一个文件就可以实现发布,不需要重启。我当时只能和他说可以多 Pod 部署,金丝雀发布等等也可以做到整个服务不停机发布。但是他最后还是带着得以意笑容离去。
当时看着他离去的身影我就发誓,我要研究一下 Go 语言的不停机重启,证明不是 Go 不行,而是我不行 [DOGE] [DOGE] [DOGE],所以就有了这么一篇文章。
那么对于一个不停机重启 Go 程序我们需要解决以下两个问题:
- 进程重启不需要关闭监听的端口;
- 既有请求应当完全处理或者超时;
后面我们会看一下 endless 是如何做到这两点的。
基本概念
下面先简单介绍一下两个知识点,以便后面的开展
信号处理
Go 信号通知通过在 Channel 上发送 os.Signal 值来工作。如我们如果使用 Ctrl+C,那么会触发 SIGINT 信号,操作系统会中断该进程的正常流程,并进入相应的信号处理函数执行操作,完成后再回到中断的地方继续执行。
func main() {
sigs := make(chan os.Signal, 1)
done := make(chan bool, 1)
// 监听信号
signal.Notify(sigs, syscall.SIGINT, syscall.SIGTERM)
go func() {
// 接收到信号返回
sig := <-sigs
fmt.Println()
fmt.Println(sig)
done <- true
}()
fmt.Println("awaiting signal")
// 等待信号的接收
<-done
fmt.Println("exiting")
}
通过上述简单的几行代码,我们就可以监听 SIGINT 和 SIGTERM 信号。当 Go 接收到操作系统发送过来的信号,那么会将信号值放入到 sigs 管道中进行处理。
Fork 子进程
在Go语言中 exec 包为我们很好的封装好了 Fork 调用,并且使用它可以使用 ExtraFiles 很好的继承父进程已打开的文件。
file := netListener.File() // this returns a Dup()
path := "/path/to/executable"
args := []string{
"-graceful"}
// 产生 Cmd 实例
cmd := exec.Command(path, args...)
// 标准输出
cmd.Stdout = os.Stdout
// 标准错误输出
cmd.Stderr = os.Stderr
cmd.ExtraFiles = []*os.File{file}
// 启动命令
err := cmd.Start()
if err != nil {
log.Fatalf("gracefulRestart: Failed to launch, error: %v", err)
}
通过调用 exec 包的 Command 命令传入 path(将要执行的命令路径)、args (命令的参数)即可返回 Cmd 实例,通过 ExtraFiles 字段指定额外被新进程继承的已打开文件,最后调用 Start 方法创建子进程。
这里的 netListener.File会通过系统调用 dup 复制一份 file descriptor 文件描述符。
func Dup(oldfd int) (fd int, err error) {
r0, _, e1 := Syscall(SYS_DUP, uintptr(oldfd), 0, 0)
fd = int(r0)
if e1 != 0 {
err = errnoErr(e1)
}
return
}
我们可以看到 dup 的命令介绍:
dup and dup2 create a copy of the file descriptor oldfd.
After successful return of dup or dup2, the old and new descriptors may
be used interchangeably. They share locks, file position pointers and
flags; for example, if the file position is modified by using lseek on
one of the descriptors, the position is also changed for the other.
The two descriptors do not share the close-on-exec flag, however.
通过上面的描述可以知道,返回的新文件描述符和参数 oldfd 指向同一个文件,共享所有的索性、读写指针、各项权限或标志位等。但是不共享关闭标志位,也就是说 oldfd 已经关闭了,也不影响写入新的数据到 newfd 中。
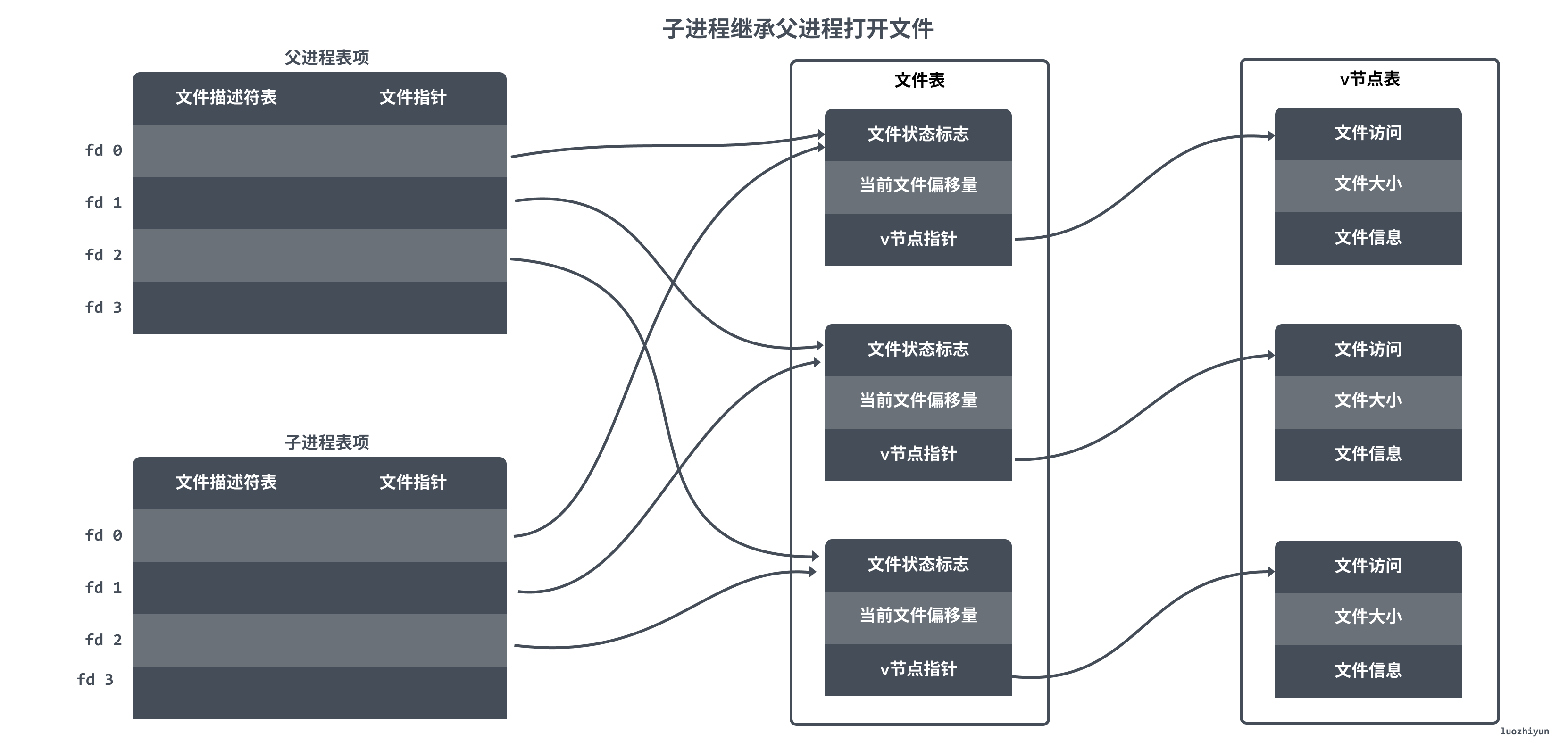
上图显示了fork一个子进程,子进程复制父进程的文件描述符表。
endless 不停机重启示例
我这里稍微写一下 endless 的使用示例给没有用过 endless 的同学看看,熟悉 endless 使用的同学可以跳过。
import (
"log"
"net/http"
"os"
"sync"
"time"
"github.com/fvbock/endless"
"github.com/gorilla/mux"
)
func handler(w http.ResponseWriter, r *http.Request) {
duration, err := time.ParseDuration(r.FormValue("duration"))
if err != nil {
http.Error(w, err.Error(), 400)
return
}
time.Sleep(duration)
w.Write([]byte("Hello World"))
}
func main() {
mux1 := mux.NewRouter()
mux1.HandleFunc("/sleep", handler)
w := sync.WaitGroup{}
w.Add(1)
go func() {
err := endless.ListenAndServe("127.0.0.1:5003", mux1)
if err != nil {
log.Println(err)
}
log.Println("Server on 5003 stopped")
w.Done()
}()
w.Wait()
log.Println("All servers stopped. Exiting.")
os.Exit(0)
}
下面验证一下 endless 创建的不停机服务:
# 第一次构建项目
go build main.go
# 运行项目,这时就可以做内容修改了
./endless &
# 请求项目,60s后返回
curl "http://127.0.0.1:5003/sleep?duration=60s" &
# 再次构建项目,这里是新内容
go build main.go
# 重启,17171为pid
kill -1 17171
# 新API请求
curl "http://127.0.0.1:5003/sleep?duration=1s"
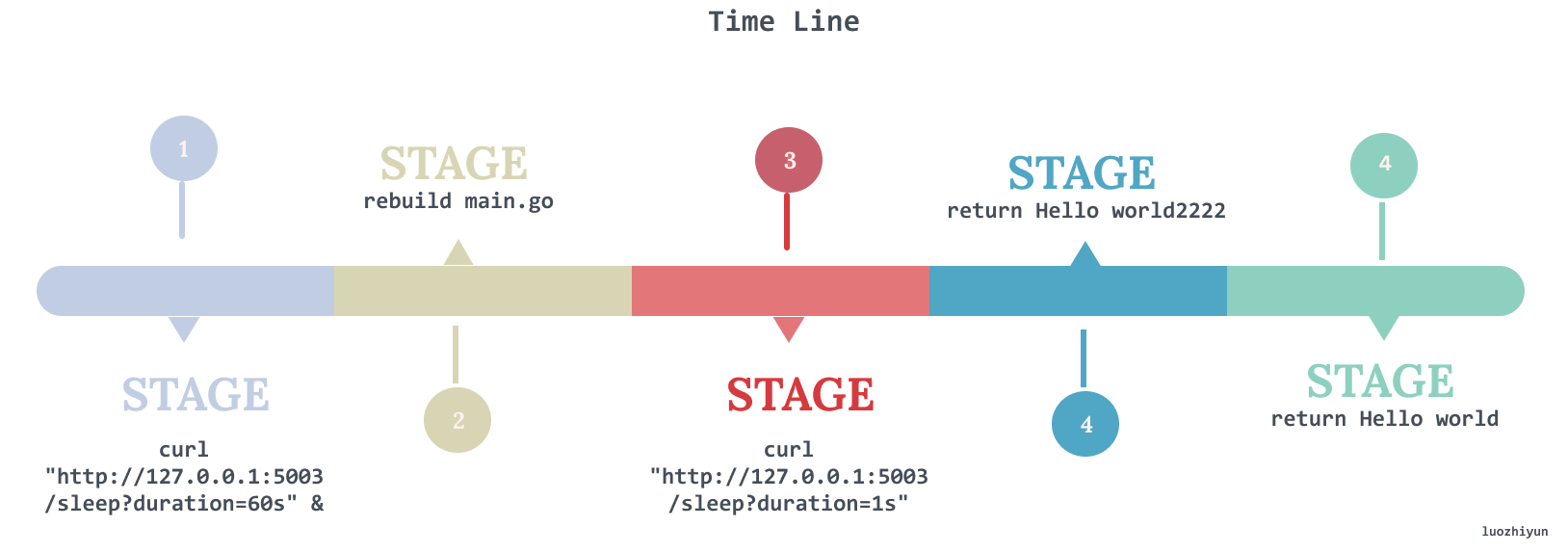
运行完上面的命令我们可以看到,对于第一个请求返回的是:Hello world,在发送第二个请求之前,我将 handler 里面的返回值改成了:Hello world2222,然后进行构建重启。
由于我设置了 60s 才返回第一个请求,第二个请求设置的是 1s 返回,所以这里会先返回第二个请求的值,然后再返回第一个请求的值。
整个时间线如下所示:
并且在等待第一个请求返回期间,可以看到同时有两个进程在跑:
$ ps -ef |grep main
root 84636 80539 0 22:25 pts/2 00:00:00 ./main
root 85423 84636 0 22:26 pts/2 00:00:00 ./main
在第一个请求响应之后,我们再看进程可以发现父进程已经关掉了,实现了父子进程无缝切换:
$ ps -ef |grep main
root 85423 1 0 22:26 pts/2 00:00:00 ./main
实现原理
在实现上,我这里用的是 endless 的实现方案,所以下面原理和代码都通过它的代码进行讲解。
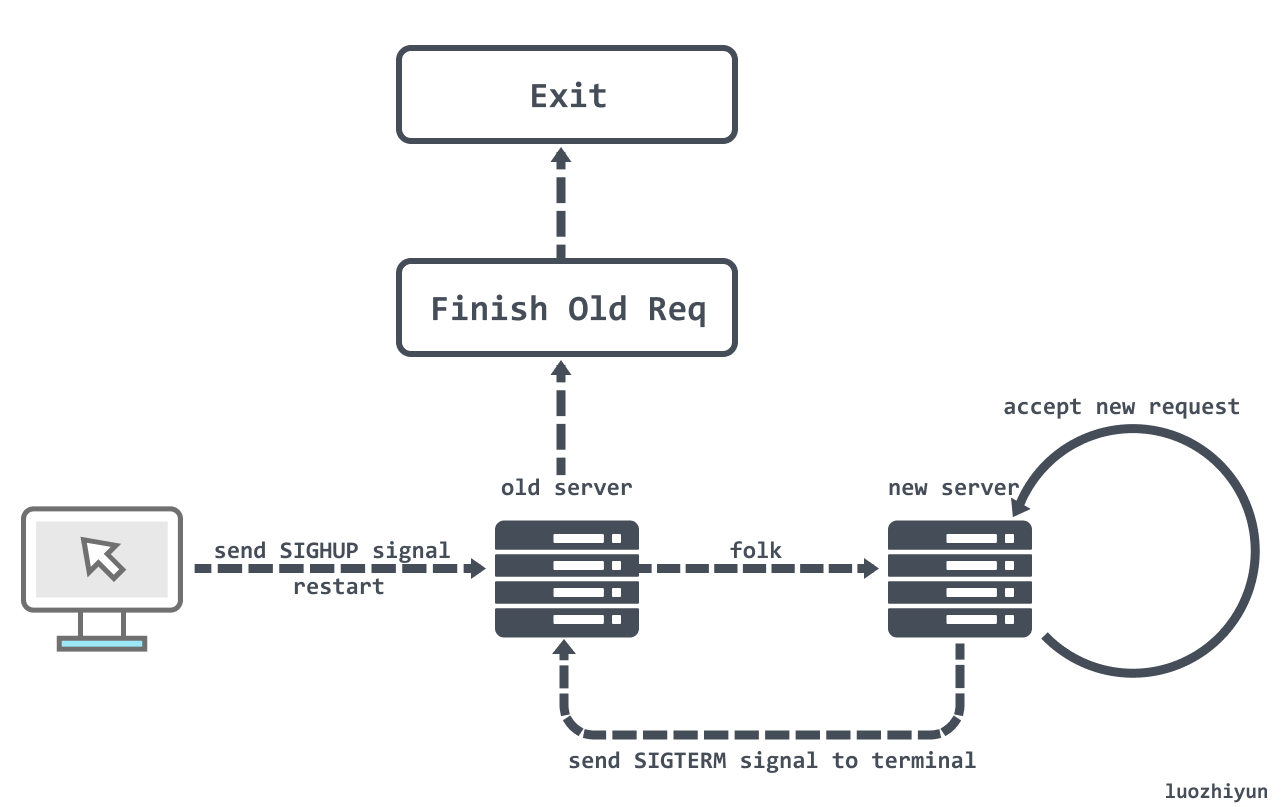 我们要做的不停机重启,实现原理如上图所示:
我们要做的不停机重启,实现原理如上图所示:
- 监听 SIGHUP 信号;
- 收到信号时 fork 子进程(使用相同的启动命令),将服务监听的 socket 文件描述符传递给子进程;
- 子进程监听父进程的 socket,这个时候父进程和子进程都可以接收请求;
- 子进程启动成功之后发送 SIGTERM 信号给父进程,父进程停止接收新的连接,等待旧连接处理完成(或超时);
- 父进程退出,升级完成;
代码实现
我们从上面的示例可以看出,endless 的入口是 ListenAndServe 函数:
func ListenAndServe(addr string, handler http.Handler) error {
// 初始化 server
server := NewServer(addr, handler)
// 监听以及处理请求
return server.ListenAndServe()
}
这个方法分为两部分,先是初始化 server,然后再监听以及处理请求。
初始化 Server
我们首先看一下一个 endless 服务的 Server 结构体是怎样:
type endlessServer struct {
// 用于继承 http.Server 结构
http.Server
// 监听客户端请求的 Listener
EndlessListener net.Listener
// 用于记录还有多少客户端请求没有完成
wg sync.WaitGroup
// 用于接收信号的管道
sigChan chan os.Signal
// 用于重启时标志本进程是否是为一个新进程
isChild bool
// 当前进程的状态
state uint8
...
}
这个 endlessServer 除了继承 http.Server 所有字段以外,因为还需要监听信号以及判断是不是一个新的进程,所以添加了几个状态位的字段:
- wg:标记还有多少客户端请求没有完成;
- sigChan:用于接收信号的管道;
- isChild:用于重启时标志本进程是否是为一个新进程;
- state:当前进程的状态。
下面我们看看如何初始化 endlessServer :
func NewServer(addr string, handler http.Handler) (srv *endlessServer) {
runningServerReg.Lock()
defer runningServerReg.Unlock()
socketOrder = os.Getenv("ENDLESS_SOCKET_ORDER")
// 根据环境变量判断是不是子进程
isChild = os.Getenv("ENDLESS_CONTINUE") != ""
// 由于支持多 server,所以这里需要设置一下 server 的顺序
if len(socketOrder) > 0 {
for i, addr := range strings.Split(socketOrder, ",") {
socketPtrOffsetMap[addr] = uint(i)
}
} else {
socketPtrOffsetMap[addr] = uint(len(runningServersOrder))
}
srv = &endlessServer{
wg: sync.WaitGroup{},
sigChan: make(chan os.Signal),
isChild: isChild,
...
state: STATE_INIT,
lock: &sync.RWMutex{},
}
srv.Server.Addr = addr
srv.Server.ReadTimeout = DefaultReadTimeOut
srv.Server.WriteTimeout = DefaultWriteTimeOut
srv.Server.MaxHeaderBytes = DefaultMaxHeaderBytes
srv.Server.Handler = handler
runningServers[addr] = srv
...
return
}
这里初始化都是我们在 net/http 里面看到的一些常见的参数,包括 ReadTimeout 读取超时时间、WriteTimeout 写入超时时间、Handler 请求处理器等,不熟悉的可以看一下这篇:《 一文说透 Go 语言 HTTP 标准库 https://www.luozhiyun.com/archives/561 》。
需要注意的是,这里是通过 ENDLESS_CONTINUE 环境变量来判断是否是个子进程,这个环境变量会在 fork 子进程的时候写入。因为 endless 是支持多 server 的,所以需要用 ENDLESS_SOCKET_ORDER变量来判断一下 server 的顺序。
ListenAndServe
func (srv *endlessServer) ListenAndServe() (err error) {
addr := srv.Addr
if addr == "" {
addr = ":http"
}
// 异步处理信号量
go srv.handleSignals()
// 获取端口监听
l, err := srv.getListener(addr)
if err != nil {
log.Println(err)
return
}
// 将监听转为 endlessListener
srv.EndlessListener = newEndlessListener(l, srv)
// 如果是子进程,那么发送 SIGTERM 信号给父进程
if srv.isChild {
syscall.Kill(syscall.Getppid(), syscall.SIGTERM)
}
srv.BeforeBegin(srv.Addr)
// 响应Listener监听,执行对应请求逻辑
return srv.Serve()
}
这个方法其实和 net/http 库是比较像的,首先获取端口监听,然后调用 Serve 处理请求发送过来的数据,大家可以打开文章《 一文说透 Go 语言 HTTP 标准库 https://www.luozhiyun.com/archives/561 》对比一下和 endless 的异同。
但是还是有几点不一样的,endless 为了做到平滑重启需要用到信号监听处理,并且在 getListener 的时候也不一样,如果是子进程需要继承到父进程的 listen fd,这样才能做到不关闭监听的端口。
handleSignals 信号处理

信号处理主要是信号的一个监听,然后根据不同的信号循环处理。
func (srv *endlessServer) handleSignals() {
var sig os.Signal
// 注册信号监听
signal.Notify(
srv.sigChan,
hookableSignals...,
)
// 获取pid
pid := syscall.Getpid()
for {
sig = <-srv.sigChan
// 在处理信号之前触发hook
srv.signalHooks(PRE_SIGNAL, sig)
switch sig {
// 接收到平滑重启信号
case syscall.SIGHUP:
log.Println(pid, "Received SIGHUP. forking.")
err := srv.fork()
if err != nil {
log.Println("Fork err:", err)
}
// 停机信号
case syscall.SIGINT:
log.Println(pid, "Received SIGINT.")
srv.shutdown()
// 停机信号
case syscall.SIGTERM:
log.Println(pid, "Received SIGTERM.")
srv.shutdown()
...
// 在处理信号之后触发hook
srv.signalHooks(POST_SIGNAL, sig)
}
}
这一部分的代码十分简洁,当我们用kill -1 $pid 的时候这里 srv.sigChan 就会接收到相应的信号,并进入到 case syscall.SIGHUP 这块逻辑代码中。
需要注意的是,在上面的 ListenAndServe 方法中子进程会像父进程发送 syscall.SIGTERM 信号也会在这里被处理,执行的是 shutdown 停机逻辑。
在进入到 case syscall.SIGHUP 这块逻辑代码之后会调用 fork 函数,下面我们再来看看 fork 逻辑:
func (srv *endlessServer) fork() (err error) {
runningServerReg.Lock()
defer runningServerReg.Unlock()
// 校验是否已经fork过
if runningServersForked {
return errors.New("Another process already forked. Ignoring this one.")
}
runningServersForked = true
var files = make([]*os.File, len(runningServers))
var orderArgs = make([]string, len(runningServers))
// 因为有多 server 的情况,所以获取所有 listen fd
for _, srvPtr := range runningServers {
switch srvPtr.EndlessListener.(type) {
case *endlessListener:
files[socketPtrOffsetMap[srvPtr.Server.Addr]] = srvPtr.EndlessListener.(*endlessListener).File()
default:
files[socketPtrOffsetMap[srvPtr.Server.Addr]] = srvPtr.tlsInnerListener.File()
}
orderArgs[socketPtrOffsetMap[srvPtr.Server.Addr]] = srvPtr.Server.Addr
}
// 环境变量
env := append(
os.Environ(),
// 启动endless 的时候,会根据这个参数来判断是否是子进程
"ENDLESS_CONTINUE=1",
)
if len(runningServers) > 1 {
env = append(env, fmt.Sprintf(`ENDLESS_SOCKET_ORDER=%s`, strings.Join(orderArgs, ",")))
}
// 程序运行路径
path := os.Args[0]
var args []string
// 参数
if len(os.Args) > 1 {
args = os.Args[1:]
}
cmd := exec.Command(path, args...)
// 标准输出
cmd.Stdout = os.Stdout
// 错误
cmd.Stderr = os.Stderr
cmd.ExtraFiles = files
cmd.Env = env
err = cmd.Start()
if err != nil {
log.Fatalf("Restart: Failed to launch, error: %v", err)
}
return
}
fork 这块代码首先会根据 server 来获取不同的 listen fd 然后封装到 files 列表中,然后在调用 cmd 的时候将文件描述符传入到 ExtraFiles 参数中,这样子进程就可以无缝托管到父进程监听的端口。
需要注意的是,env 参数列表中有一个 ENDLESS_CONTINUE 参数,这个参数会在 endless 启动的时候做校验:
func NewServer(addr string, handler http.Handler) (srv *endlessServer) {
runningServerReg.Lock()
defer runningServerReg.Unlock()
socketOrder = os.Getenv("ENDLESS_SOCKET_ORDER")
isChild = os.Getenv("ENDLESS_CONTINUE") != ""
...
}
下面我们再看看 接收到 SIGTERM 信号后,shutdown 会怎么做:
func (srv *endlessServer) shutdown() {
if srv.getState() != STATE_RUNNING {
return
}
srv.setState(STATE_SHUTTING_DOWN)
// 默认 DefaultHammerTime 为 60秒
if DefaultHammerTime >= 0 {
go srv.hammerTime(DefaultHammerTime)
}
// 关闭存活的连接
srv.SetKeepAlivesEnabled(false)
err := srv.EndlessListener.Close()
if err != nil {
log.Println(syscall.Getpid(), "Listener.Close() error:", err)
} else {
log.Println(syscall.Getpid(), srv.EndlessListener.Addr(), "Listener closed.")
}
}
shutdown 这里会先将连接关闭,因为这个时候子进程已经启动了,所以不再处理请求,需要把端口的监听关了。这里还会异步调用 srv.hammerTime 方法等待60秒把父进程的请求处理完毕才关闭父进程。
getListener 获取端口监听
func (srv *endlessServer) getListener(laddr string) (l net.Listener, err error) {
// 如果是子进程
if srv.isChild {
var ptrOffset uint = 0
runningServerReg.RLock()
defer runningServerReg.RUnlock()
// 这里还是处理多个 server 的情况
if len(socketPtrOffsetMap) > 0 {
// 根据server 的顺序来获取 listen fd 的序号
ptrOffset = socketPtrOffsetMap[laddr]
}
// fd 0,1,2是预留给 标准输入、输出和错误的,所以从3开始
f := os.NewFile(uintptr(3+ptrOffset), "")
l, err = net.FileListener(f)
if err != nil {
err = fmt.Errorf("net.FileListener error: %v", err)
return
}
} else {
// 父进程 直接返回 listener
l, err = net.Listen("tcp", laddr)
if err != nil {
err = fmt.Errorf("net.Listen error: %v", err)
return
}
}
return
}
这里如果是父进程没什么好说的,直接创建一个端口监听并返回就好了。
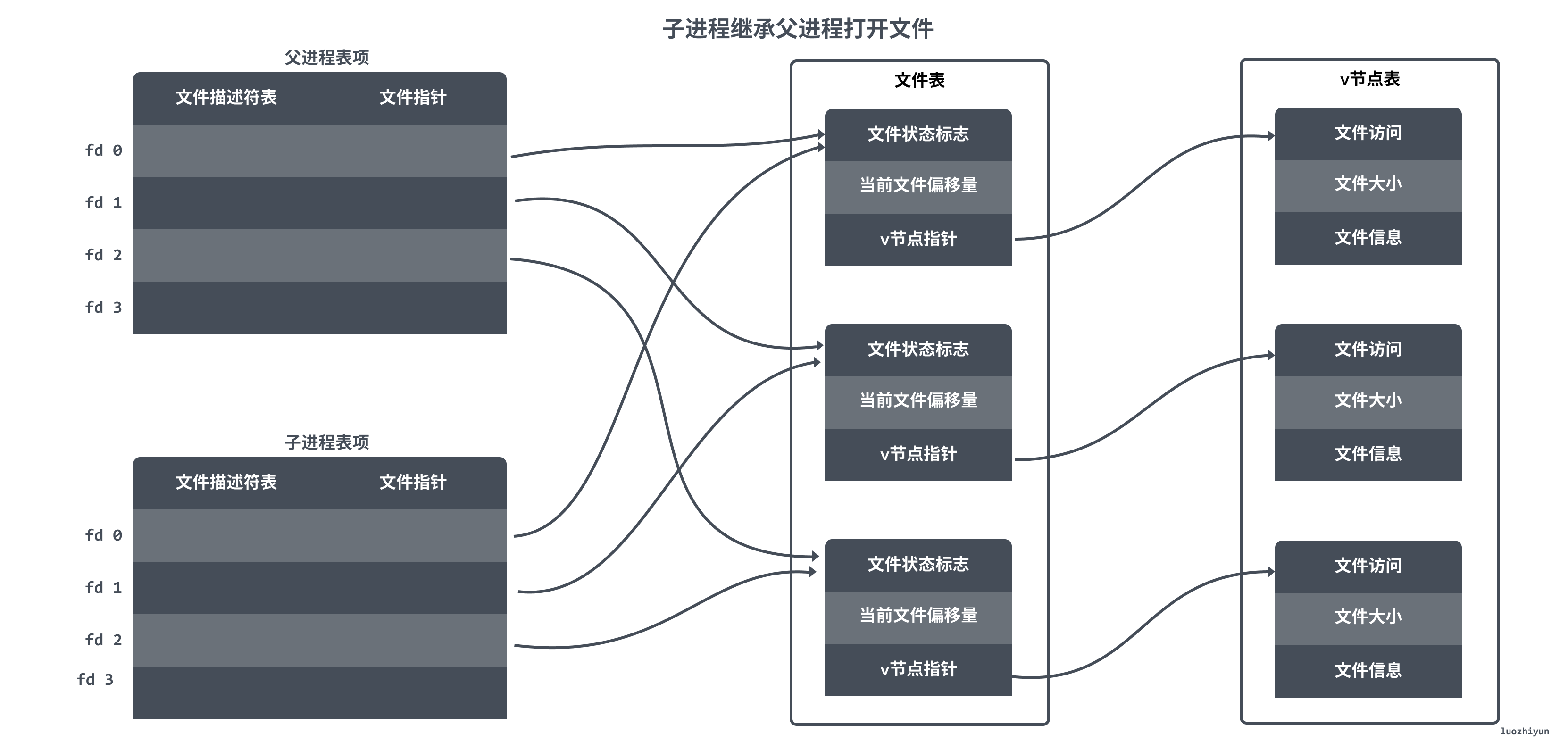
但是对于子进程来说是有一些绕,首先说一下 os.NewFile 的参数为什么要从3开始。因为子进程在继承父进程的 fd 的时候0,1,2是预留给 标准输入、输出和错误的,所以父进程给的第一个fd在子进程里顺序排就是从3开始了,又因为 fork 的时候cmd.ExtraFiles 参数传入的是一个 files,如果有多个 server 那么会依次从3开始递增。
如下图,前三个 fd 是预留给 标准输入、输出和错误的,fd 3 是根据传入 ExtraFiles 的数组列表依次递增的。
其实这里我们也可以用开头的例子做一下试验:
# 第一次构建项目
go build main.go
# 运行项目,这时就可以做内容修改了
./endless &
# 这个时候我们看看父进程打开的文件
lsof -P -p 17116
COMMAND PID USER FD TYPE DEVICE SIZE/OFF NODE NAME
...
main 18942 root 0u CHR 136,2 0t0 5 /dev/pts/2
main 18942 root 1u CHR 136,2 0t0 5 /dev/pts/2
main 18942 root 2u CHR 136,2 0t0 5 /dev/pts/2
main 18942 root 3u IPv4 2223979 0t0 TCP localhost:5003 (LISTEN)
# 请求项目,60s后返回
curl "http://127.0.0.1:5003/sleep?duration=60s" &
# 重启,17116为父进程pid
kill -1 17116
# 然后我们看一下 main 程序的进程应该有两个
ps -ef |grep ./main
root 17116 80539 0 04:19 pts/2 00:00:00 ./main
root 18110 17116 0 04:21 pts/2 00:00:00 ./main
# 可以看到子进程pid 为18110,我们看看该进程打开的文件
lsof -P -p 18110
COMMAND PID USER FD TYPE DEVICE SIZE/OFF NODE NAME
...
main 19073 root 0r CHR 1,3 0t0 1028 /dev/null
main 19073 root 1u CHR 136,2 0t0 5 /dev/pts/2
main 19073 root 2u CHR 136,2 0t0 5 /dev/pts/2
main 19073 root 3u IPv4 2223979 0t0 TCP localhost:5003 (LISTEN)
main 19073 root 4u IPv4 2223979 0t0 TCP localhost:5003 (LISTEN)
# 新API请求
curl "http://127.0.0.1:5003/sleep?duration=1s"
总结
通过上面的介绍,我们通过 endless 学习了在 Go 服务中如何做到不停机也可以重启服务,相信这个功能在很多场景下都会用到,没用到的同学也可以尝试在自己的系统上玩一下。
热重启总的来说它允许服务重启期间,不中断已经建立的连接,老服务进程不再接受新连接请求,新连接请求将在新服务进程中受理。对于原服务进程中已经建立的连接,也可以将其设为读关闭,等待平滑处理完连接上的请求及连接空闲后再行退出。
通过这种方式,可以保证已建立的连接不中断,新的服务进程也可以正常接受连接请求。
Reference
https://goteleport.com/blog/golang-ssh-bastion-graceful-restarts/
https://grisha.org/blog/2014/06/03/graceful-restart-in-golang/
https://stackoverflow.com/questions/28370646/how-do-i-fork-a-go-process/28371586#28371586
https://xixiliguo.github.io/post/golang-exec/
https://github.com/fvbock/endless
https://golang.org/pkg/os/signal/
http://www.hitzhangjie.pro/blog/2020-08-28-go程序如何实现热重启/
endless 如何实现不停机重启 Go 程序?的更多相关文章
- go程序不停机重启
让我们给http服务写一个版本更新接口,让它自动更新版本并重启服务吧. 初步例子 注:为了精简,文中代码都去除了err处理 main.go var Version = "1.0" ...
- Qt之重启应用程序
简介 今天分享的内容有些意思-如何重启一个应用程序.其实,有时候这是一个很重要的功能点,而且很人性化.易用性很好. 例如:切换用户.当某个用户登录成功之后,需要切换到其它账号,那么这时,你就知道它的重 ...
- 【Qt】Qt之重启应用程序【转】
简介 今天分享的内容有些意思-如何重启一个应用程序.其实,有时候这是一个很重要的功能点,而且很人性化.易用性很好. 例如:切换用户.当某个用户登录成功之后,需要切换到其它账号,那么这时,你就知道它的重 ...
- Delphi 重启应用程序(创建Bat文件的Process)
Delphi 重启应用程序在工程主文件中加入Delay(500); //启动程序时请延时一段时间,否则只能重启一次 procedure RestartApp; var BatchFile: TextF ...
- python实现自动重启本程序的方法 技术的漩涡
python实现自动重启本程序的方法 http://www.jb51.net/article/69174.htm import requests, time url_l = []with open(' ...
- 亲测实验,stm32待机模式和停机模式唤醒程序的区别,以及唤醒后程序入口
这两天研究了STM32的低功耗知识,低功耗里主要研究的是STM32的待机模式和停机模式.让单片机进入的待机模式和停机模式比较容易,实验中通过设置中断口PA1来响应待机和停机模式. void EXTI1 ...
- bcb6重启应用程序
在工程的cpp文件中WinMain还是得最后添加如下的代码(其中g_blsRunAgain为bool类型的全局变量,在需求重启的时候先将g_blsRunAgain置为true,再将程序关闭,之后就会重 ...
- c# 关闭和重启.exe程序
Process[] myprocess = Process.GetProcessesByName("a"); if (myprocess.Count() > 0)//判断如果 ...
- STM32 重启之后程序丢失
1 BOOT1 BOOT0都已经接10K接地,晶振波形正常 2 在主程序最开始运行的地方加入5秒的延时,程序不会丢失.原因可能为单片机其它外设没有准备好 int main(void) { delay_ ...
随机推荐
- win系统下如何安装xgboost,开发环境是anaconda,以及这中间需要注意的问题
最近学到了xgboost,但是anaconda并没有这个环境只好自己安装了... 注: (1)并没有测试anaconda在2.x的版本下是如何安装的, 基本上应该是大同小类的,我的anaconda版本 ...
- .Net之简单通知服务
开篇语 这两天看见有大佬分享使用钉钉和企业微信的机器人来做通知报警,然后我想到了我使用的另一个第三方软件捷易快信(可能大家都不知道这个东西,我也忘了我最开始是咋知道的),该服务的优点是可以通过微信进行 ...
- iOS视频硬编码技术
iOS视频硬编码技术 一.iOS视频采集硬编码 基本原理 硬编码 & 软编码 硬编码:通过系统自带的Camera录制视频,实际上调用的是底层的高清编码硬件模块,即显卡,不使用CPU,速度快 软 ...
- 基于TensorRT 3的自动驾驶快速INT8推理
基于TensorRT 3的自动驾驶快速INT8推理 Fast INT8 Inference for Autonomous Vehicles with TensorRT 3 自主驾驶需要安全性,需要一种 ...
- pytest基础简介及实践举例
一.pytest简介 pytest 是 python 的第三方单元测试框架,比自带的 unittest 更简洁和高效,同时兼容 unittest 框架.它还有如下优点: 1.简单灵活,容易上手,文档丰 ...
- ES6中的数组方法扩展
上一篇文章小编简单介绍了在ES6中,一些常用的方法和一些简单的应用,在这篇文章中,小编将针对ES6中数组常用方法进行扩展,相信经过这篇文章之后,每一位小伙伴下班时间会有所提前,就算从原来的996变成9 ...
- 狂神说linux笔记:基本操作
Linux介绍 Linux的概述本文就不赘述了,如果想仔细了解的小伙伴可以百度Linux的历史或者看看狂神的原文.本文主要写linux的操作过程知识点. 狂神的原文如下: https://mp.wei ...
- XML文件存在中文注释报错问题( 3 字节的 UTF-8 序列的字节 3 无效)
今天在做mybatis项目的时候,给映射文件添加了中文注释后,程序就报错.把中文注释删除后,程序又可以正常执行.解决方法在下文提到. 我的xml映射文件如下: <?xml version=&qu ...
- string大小写转换
string大小写转换 源码: 1 #include <string> 2 #include <iostream> 3 #include <algorithm> 4 ...
- 试着给VuePress添加渐进式Web应用(PWA)支持,基于vuepress/plugin-pwa,点亮离线访问
背景 有时候,我们也希望VuePress构建的文档中心能支持离线访问,这时候我们需要给他添加渐进式Web应用(PWA,Progressive Web App)的支持,根据官方文档指引,我们可以借助插件 ...