『TensorFlow』读书笔记_Inception_V3_下
极为庞大的网络结构,不过下一节的ResNet也不小
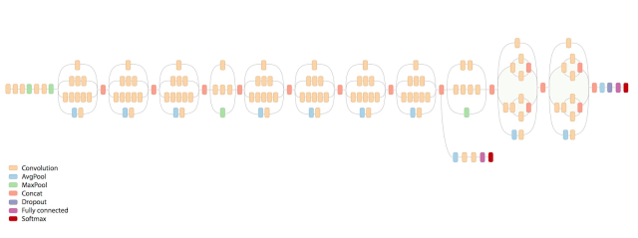
线性的组成,结构大体如下:
常规卷积部分->Inception模块组1->Inception模块组2->Inception模块组3->池化->1*1卷积(实现个线性变换)->分类器
|_>辅助分类器
代码如下,
# Author : Hellcat
# Time : 2017/12/12
# refer : https://github.com/tensorflow/models/
# blob/master/research/inception/inception/slim/inception_model.py import time
import math
import tensorflow as tf
from datetime import datetime slim = tf.contrib.slim
# 截断误差初始化生成器
trunc_normal = lambda stddev:tf.truncated_normal_initializer(0.0,stddev) def inception_v3_arg_scope(weight_decay=0.00004,
stddv=0.1,
batch_norm_var_collection='moving_vars'):
'''
网络常用函数默认参数生成
:param weight_decay: L2正则化decay
:param stddv: 标准差
:param batch_norm_var_collection:
:return:
'''
batch_norm_params = {
'decay':0.9997, # 衰减系数
'epsilon':0.001,
'updates_collections':{
'bate':None,
'gamma':None,
'moving_mean':[batch_norm_var_collection], # 批次均值
'moving_variance':[batch_norm_var_collection] # 批次方差
}
}
# 外层环境
with slim.arg_scope([slim.conv2d,slim.fully_connected],
# 权重正则化函数
weights_regularizer=slim.l2_regularizer(weight_decay)):
# 内层环境
with slim.arg_scope([slim.conv2d],
# 权重初始化函数
weights_initializer=tf.truncated_normal_initializer(stddev=stddv),
# 激活函数,默认为nn.relu
activation_fn=tf.nn.relu,
# 正则化函数,默认为None
normalizer_fn=slim.batch_norm,
# 正则化函数参数,字典形式
normalizer_params=batch_norm_params) as sc:
return sc def inception_v3_base(inputs,scope=None):
# 保存关键节点
end_points = {}
# 重载作用域的名称,创建新的作用域名称(前面是None时使用),输入tensor
with tf.variable_scope(scope,'Inception_v3',[inputs]):
with slim.arg_scope([slim.conv2d,slim.max_pool2d,slim.avg_pool2d],
stride=1,padding='VALID'):
# 299*299*3 net = slim.conv2d(inputs,32,[3,3],stride=2,scope='Conv2d_1a_3x3') # 149*149*32
net = slim.conv2d(net,32,[3,3],scope='Conv2d_2a_3x3') # 147*147*32
net = slim.conv2d(net,64,[3,3],padding='SAME',scope='Conv2d_2b_3x3') # 147*147*64
net = slim.max_pool2d(net,[3,3],stride=2,scope='MaxPool_3a_3x3') # 73*73*64
net = slim.conv2d(net,80,[1,1],scope='Conv2d_3b_1x1') # 73*73*80
net = slim.conv2d(net,192,[1,1],scope='Conv2d_4a_3x3') # 71*71*192
net = slim.max_pool2d(net,[3,3],stride=2,scope='MaxPool_5a_3x3') # 35*35*192 with slim.arg_scope([slim.conv2d,slim.max_pool2d,slim.avg_pool2d],
stride=1,padding='SAME'):
'''Inception 第一模组块'''
# Inception_Module_1
with tf.variable_scope('Mixed_5b'): # 35*35*256
with tf.variable_scope('Branch_0'):
branch_0 = slim.conv2d(net,64,[1,1],scope='Conv2d_0a_1x1')
with tf.variable_scope('Branch_1'):
branch_1 = slim.conv2d(net,48,[1,1],scope='Conv2d_0a_1x1')
branch_1 = slim.conv2d(branch_1,64,[5,5],scope='Conv2d_0b_5x5')
with tf.variable_scope('Branch_2'):
branch_2 = slim.conv2d(net,64,[1,1],scope='Conv2d_0a_1x1')
branch_2 = slim.conv2d(branch_2,96,[3,3],scope='Conv2d_0b_3x3')
branch_2 = slim.conv2d(branch_2,96,[3,3],scope='Conv2d_0c_3x3')
with tf.variable_scope('Branch_3'):
branch_3 = slim.avg_pool2d(net,[3,3],scope='AvgPool_0a_3x3')
branch_3 = slim.conv2d(branch_3,32,[1,1],scope='Conv2d_0b_1x1')
net = tf.concat([branch_0,branch_1,branch_2,branch_3],axis=3) # Inception_Module_2
with tf.variable_scope('Mixed_5c'): # 35*35*288
with tf.variable_scope('Branch_0'):
branch_0 = slim.conv2d(net,64,[1,1],scope='Conv2d_0a_1x1')
with tf.variable_scope('Branch_1'):
branch_1 = slim.conv2d(net,48,[1,1],scope='Conv2d_0a_1x1')
branch_1 = slim.conv2d(branch_1,64,[5,5],scope='Conv2d_0b_5x5')
with tf.variable_scope('Branch_2'):
branch_2 = slim.conv2d(net,64,[1,1],scope='Conv2d_0a_1x1')
branch_2 = slim.conv2d(branch_2,96,[3,3],scope='Conv2d_0b_3x3')
branch_2 = slim.conv2d(branch_2,96,[3,3],scope='Conv2d_0c_3x3')
with tf.variable_scope('Branch_3'):
branch_3 = slim.avg_pool2d(net,[3,3],scope='AvgPool_0a_3x3')
branch_3 = slim.conv2d(branch_3,64,[1,1],scope='Conv2d_0b_1x1')
net = tf.concat([branch_0,branch_1,branch_2,branch_3],axis=3) # Inception_Module_3
with tf.variable_scope('Mixed_5d'): # 35*35*288
with tf.variable_scope('Branch_0'):
branch_0 = slim.conv2d(net,64,[1,1],scope='Conv2d_0a_1x1')
with tf.variable_scope('Branch_1'):
branch_1 = slim.conv2d(net,48,[1,1],scope='Conv2d_0a_1x1')
branch_1 = slim.conv2d(branch_1,64,[5,5],scope='Conv2d_0b_5x5')
with tf.variable_scope('Branch_2'):
branch_2 = slim.conv2d(net,64,[1,1],scope='Conv2d_0a_1x1')
branch_2 = slim.conv2d(branch_2,96,[3,3],scope='Conv2d_0b_3x3')
branch_2 = slim.conv2d(branch_2,96,[3,3],scope='Conv2d_0c_3x3')
with tf.variable_scope('Branch_3'):
branch_3 = slim.avg_pool2d(net,[3,3],scope='AvgPool_0a_3x3')
branch_3 = slim.conv2d(branch_3,64,[1,1],scope='Conv2d_0b_1x1')
net = tf.concat([branch_0,branch_1,branch_2,branch_3],axis=3) '''Inception 第二模组块'''
# Inception_Module_1
with tf.variable_scope('Mixed_6a'): # 17*17*768
with tf.variable_scope('Branch_0'):
branch_0 = slim.conv2d(net,384,[3,3],stride=2,
padding='VALID',scope='Conv2d_1a_1x1')
with tf.variable_scope('Branch_1'):
branch_1 = slim.conv2d(net,64,[1,1],scope='Conv2d_0a_1x1')
branch_1 = slim.conv2d(branch_1,96,[3,3],scope='Conv2d_0b_3x3')
branch_1 = slim.conv2d(branch_1,96,[3,3],stride=2,
padding='VALID',scope='Conv2d_1a_3x3')
with tf.variable_scope('Branch_2'):
branch_2 = slim.max_pool2d(net,[3,3],stride=2,padding='VALID',
scope='Max_Pool_1a_3x3')
net = tf.concat([branch_0,branch_1,branch_2],axis=3) # Inception_Module_2
with tf.variable_scope('Mixed_6b'): # 17*17*768
with tf.variable_scope('Branch_0'):
branch_0 = slim.conv2d(net,192,[1,1],scope='Conv2d_0a_1x1')
with tf.variable_scope('Branch_1'):
branch_1 = slim.conv2d(net,128,[1,1],scope='Conv2d_0a_1x1')
branch_1 = slim.conv2d(branch_1,128,[1,7],scope='Conv2d_0b_1x7')
branch_1 = slim.conv2d(branch_1,192,[7,1],scope='Conv2d_0c_7x1')
with tf.variable_scope('Branch_2'):
branch_2 = slim.conv2d(net,128,[1,1],scope='Conv2d_0a_1x1')
branch_2 = slim.conv2d(branch_2,128,[7,1],scope='Conv2d_0b_7x1')
branch_2 = slim.conv2d(branch_2,128,[1,7],scope='Conv2d_0c_1x7')
branch_2 = slim.conv2d(branch_2,128,[7,1],scope='Conv2d_0d_7x1')
branch_2 = slim.conv2d(branch_2,192,[1,7],scope='Conv2d_0e_1x7')
with tf.variable_scope('Branch_3'):
branch_3 = slim.avg_pool2d(net,[3,3],scope='AvgPool_0a_3x3')
branch_3 = slim.conv2d(branch_3,192,[1,1],scope='Conv2d_0b_1x1')
net = tf.concat([branch_0,branch_1,branch_2,branch_3],axis=3) # Inception_Module_3
with tf.variable_scope('Mixed_6c'): # 17*17*768
with tf.variable_scope('Branch_0'):
branch_0 = slim.conv2d(net,192,[1,1],scope='Conv2d_0a_1x1')
with tf.variable_scope('Branch_1'):
branch_1 = slim.conv2d(net,160,[1,1],scope='Conv2d_0a_1x1')
branch_1 = slim.conv2d(branch_1,160,[1,7],scope='Conv2d_0b_1x7')
branch_1 = slim.conv2d(branch_1,192,[7,1],scope='Conv2d_0c_7x1')
with tf.variable_scope('Branch_2'):
branch_2 = slim.conv2d(net,160,[1,1],scope='Conv2d_0a_1x1')
branch_2 = slim.conv2d(branch_2,160,[7,1],scope='Conv2d_0b_7x1')
branch_2 = slim.conv2d(branch_2,160,[1,7],scope='Conv2d_0c_1x7')
branch_2 = slim.conv2d(branch_2,160,[7,1],scope='Conv2d_0d_7x1')
branch_2 = slim.conv2d(branch_2,192,[1,7],scope='Conv2d_0e_1x7')
with tf.variable_scope('Branch_3'):
branch_3 = slim.avg_pool2d(net,[3,3],scope='AvgPool_0a_3x3')
branch_3 = slim.conv2d(branch_3,192,[1,1],scope='Conv2d_0b_1x1')
net = tf.concat([branch_0,branch_1,branch_2,branch_3],axis=3) # Inception_Module_4
with tf.variable_scope('Mixed_6d'): # 17*17*768
with tf.variable_scope('Branch_0'):
branch_0 = slim.conv2d(net,192,[1,1],scope='Conv2d_0a_1x1')
with tf.variable_scope('Branch_1'):
branch_1 = slim.conv2d(net,160,[1,1],scope='Conv2d_0a_1x1')
branch_1 = slim.conv2d(branch_1,160,[1,7],scope='Conv2d_0b_1x7')
branch_1 = slim.conv2d(branch_1,192,[7,1],scope='Conv2d_0c_7x1')
with tf.variable_scope('Branch_2'):
branch_2 = slim.conv2d(net,160,[1,1],scope='Conv2d_0a_1x1')
branch_2 = slim.conv2d(branch_2,160,[7,1],scope='Conv2d_0b_7x1')
branch_2 = slim.conv2d(branch_2,160,[1,7],scope='Conv2d_0c_1x7')
branch_2 = slim.conv2d(branch_2,160,[7,1],scope='Conv2d_0d_7x1')
branch_2 = slim.conv2d(branch_2,192,[1,7],scope='Conv2d_0e_1x7')
with tf.variable_scope('Branch_3'):
branch_3 = slim.avg_pool2d(net,[3,3],scope='AvgPool_0a_3x3')
branch_3 = slim.conv2d(branch_3,192,[1,1],scope='Conv2d_0b_1x1')
net = tf.concat([branch_0,branch_1,branch_2,branch_3],axis=3) # Inception_Module_5
with tf.variable_scope('Mixed_6e'): # 17*17*768
with tf.variable_scope('Branch_0'):
branch_0 = slim.conv2d(net,192,[1,1],scope='Conv2d_0a_1x1')
with tf.variable_scope('Branch_1'):
branch_1 = slim.conv2d(net,192,[1,1],scope='Conv2d_0a_1x1')
branch_1 = slim.conv2d(branch_1,192,[1,7],scope='Conv2d_0b_1x7')
branch_1 = slim.conv2d(branch_1,192,[7,1],scope='Conv2d_0c_7x1')
with tf.variable_scope('Branch_2'):
branch_2 = slim.conv2d(net,192,[1,1],scope='Conv2d_0a_1x1')
branch_2 = slim.conv2d(branch_2,192,[7,1],scope='Conv2d_0b_7x1')
branch_2 = slim.conv2d(branch_2,192,[1,7],scope='Conv2d_0c_1x7')
branch_2 = slim.conv2d(branch_2,192,[7,1],scope='Conv2d_0d_7x1')
branch_2 = slim.conv2d(branch_2,192,[1,7],scope='Conv2d_0e_1x7')
with tf.variable_scope('Branch_3'):
branch_3 = slim.avg_pool2d(net,[3,3],scope='AvgPool_0a_3x3')
branch_3 = slim.conv2d(branch_3,192,[1,1],scope='Conv2d_0b_1x1')
net = tf.concat([branch_0,branch_1,branch_2,branch_3],axis=3)
end_points['Mixed_6e'] = net '''Inception 第三模组块'''
# Inception_Module_1
with tf.variable_scope('Mixed_7a'): # 8*8*1280
with tf.variable_scope('Branch_0'):
branch_0 = slim.conv2d(net,192,[1,1],scope='Conv2d_0a_1x1')
branch_0 = slim.conv2d(branch_0,320,[3,3],stride=2,
padding='VALID',scope='Conv2d_1a_3x3')
with tf.variable_scope('Branch_1'):
branch_1 = slim.conv2d(net,192,[1,1],scope='Conv2d_0a_1x1')
branch_1 = slim.conv2d(branch_1,192,[1,7],scope='Conv2d_0b_1x7')
branch_1 = slim.conv2d(branch_1,192,[7,1],scope='Conv2d_0c_7x1')
branch_1 = slim.conv2d(branch_1,192,[3,3],stride=2,padding='VALID',scope='Conv2d_1a_3x3')
with tf.variable_scope('Branch_2'):
branch_2 = slim.max_pool2d(net,[3,3],stride=2,padding='VALID',
scope='MaxPool_1a_3x3')
net = tf.concat([branch_0,branch_1,branch_2],3) # Inception_Module_2
with tf.variable_scope('Mixed_7b'): # 8*8*2048
with tf.variable_scope('Branch_0'):
branch_0 = slim.conv2d(net,320,[1,1],scope='Conv2d_0a_1x1')
with tf.variable_scope('Branch_1'):
branch_1 = slim.conv2d(net,384,[1,1],scope='Conv2d_0a_1x1')
branch_1 = tf.concat([
slim.conv2d(branch_1,384,[1,3],scope='Conv2d_0b_1x3'),
slim.conv2d(branch_1,384,[3,1],scope='Conv2d_0b_3x1')],axis=3)
with tf.variable_scope('Branch_2'):
branch_2 = slim.conv2d(net,448,[1,1],scope='Conv2d_0a_1x1')
branch_2 = slim.conv2d(branch_2,384,[3,3],scope='Conv2d_0b_3x3')
branch_2 = tf.concat([
slim.conv2d(branch_2,384,[1,3],scope='Conv2d_0c_1x3'),
slim.conv2d(branch_2,384,[3,1],scope='Conv2d_0d_3x1')],axis=3)
with tf.variable_scope('Branch_3'):
branch_3 = slim.max_pool2d(net,[3,3],scope='AvgPool_0a_3x3')
branch_3 = slim.conv2d(branch_3,192,[1,1],scope='Conv2d_0b_1x1')
net = tf.concat([branch_0,branch_1,branch_2,branch_3],3) # Inception_Module_3
with tf.variable_scope('Mixed_7c'): # 8*8*2048
with tf.variable_scope('Branch_0'):
branch_0 = slim.conv2d(net,320,[1,1],scope='Conv2d_0a_1x1')
with tf.variable_scope('Branch_1'):
branch_1 = slim.conv2d(net,384,[1,1],scope='Conv2d_0a_1x1')
branch_1 = tf.concat([
slim.conv2d(branch_1,384,[1,3],scope='Conv2d_0b_1x3'),
slim.conv2d(branch_1,384,[3,1],scope='Conv2d_0b_3x1')],axis=3)
with tf.variable_scope('Branch_2'):
branch_2 = slim.conv2d(net,448,[1,1],scope='Conv2d_0a_1x1')
branch_2 = slim.conv2d(branch_2,384,[3,3],scope='Conv2d_0b_3x3')
branch_2 = tf.concat([
slim.conv2d(branch_2,384,[1,3],scope='Conv2d_0c_1x3'),
slim.conv2d(branch_2,384,[3,1],scope='Conv2d_0d_3x1')],axis=3)
with tf.variable_scope('Branch_3'):
branch_3 = slim.max_pool2d(net,[3,3],scope='AvgPool_0a_3x3')
branch_3 = slim.conv2d(branch_3,192,[1,1],scope='Conv2d_0b_1x1')
net = tf.concat([branch_0,branch_1,branch_2,branch_3],3) return net,end_points def inception_v3(inputs,
num_classes=1000,
is_training=True,
dropout_keep_prob=0.8,
prediction_fn=slim.softmax,
spatial_squeeze=True,
reuse=None,
scope='Inception_v3'):
with tf.variable_scope(scope,'Inception_v3',[inputs,num_classes],reuse=reuse) as scope:
with slim.arg_scope([slim.batch_norm,slim.dropout],
is_training=is_training):
net,end_points = inception_v3_base(inputs,scope=scope)
with slim.arg_scope([slim.conv2d,slim.max_pool2d,slim.avg_pool2d],
stride=1,padding='SAME'):
# 17*17*768
aux_logits = end_points['Mixed_6e']
with tf.variable_scope('AuxLogits'):
aux_logits = slim.avg_pool2d(aux_logits,[5,5],stride=3,padding='VALID',scope='AvgPool_1a_5x5')
aux_logits = slim.conv2d(aux_logits,128,[1,1],scope='Conv2d_1b_1x1')
aux_logits = slim.conv2d(aux_logits,768,[5,5],
weights_initializer=trunc_normal(0.01),
padding='VALID',
scope='Conv2d_2a_5x5')
aux_logits = slim.conv2d(aux_logits,num_classes,[1,1],activation_fn=None,
normalizer_fn=None,weights_initializer=trunc_normal(0.001),
scope='Conv2d_2b_1x1')
if spatial_squeeze:
aux_logits = tf.squeeze(aux_logits,[1,2],
name='SpatialSqueeze')
end_points['AuxLogits'] = aux_logits
with tf.variable_scope('Logits'):
net = slim.avg_pool2d(net,[8,8],padding='VALID',
scope='AvgPool_1a_8x8')
net = slim.dropout(net,keep_prob=dropout_keep_prob,scope='Dropout_1b')
end_points['PreLogits'] = net
logits = slim.conv2d(net,num_classes,[1,1],activation_fn=None,
normalizer_fn=None,scope='Conv2d_1c_1x1')
if spatial_squeeze:
logits = tf.squeeze(logits,[1,2],name='SpatialSqueeze')
end_points['Logits'] = logits
end_points['Predictions'] = prediction_fn(logits,scope='Predictions')
return logits, end_points def time_tensorflow_run(session, target, info_string):
'''
网路运行时间测试函数
:param session: 会话对象
:param target: 运行目标节点
:param info_string:提示字符
:return: None
'''
num_steps_burn_in = 10 # 预热轮数
total_duration = 0.0 # 总时间
total_duration_squared = 0.0 # 总时间平方和
for i in range(num_steps_burn_in + num_batches):
start_time = time.time()
_ = session.run(target)
duration = time.time() - start_time # 本轮时间
if i >= num_steps_burn_in:
if not i % 10:
print('%s: step %d, duration = %.3f' %
(datetime.now(),i-num_steps_burn_in,duration))
total_duration += duration
total_duration_squared += duration**2 mn = total_duration/num_batches # 平均耗时
vr = total_duration_squared/num_batches - mn**2
sd = math.sqrt(vr)
print('%s:%s across %d steps, %.3f +/- %.3f sec / batch' %
(datetime.now(), info_string, num_batches, mn, sd)) if __name__ == '__main__':
batch_size=32
height,width = 299,299
inputs = tf.random_uniform((batch_size,height,width,3))
with slim.arg_scope(inception_v3_arg_scope()):
logits,end_points = inception_v3(inputs,is_training=False)
init = tf.global_variables_initializer()
sess = tf.Session()
sess.run(init)
num_batches = 100
time_tensorflow_run(sess,logits,'Forward')
运行起来时耗过长,就不贴了。
『TensorFlow』读书笔记_Inception_V3_下的更多相关文章
- 『TensorFlow』读书笔记_Inception_V3_上
1.网络背景 自2012年Alexnet提出以来,图像分类.目标检测等一系列领域都被卷积神经网络CNN统治着.接下来的时间里,人们不断设计新的深度学习网络模型来获得更好的训练效果.一般而言,许多网络结 ...
- 『TensorFlow』读书笔记_降噪自编码器
『TensorFlow』降噪自编码器设计 之前学习过的代码,又敲了一遍,新的收获也还是有的,因为这次注释写的比较详尽,所以再次记录一下,具体的相关知识查阅之前写的文章即可(见上面链接). # Aut ...
- 『TensorFlow』读书笔记_VGGNet
VGGNet网络介绍 VGG系列结构图, 『cs231n』卷积神经网络工程实践技巧_下 1,全部使用3*3的卷积核和2*2的池化核,通过不断加深网络结构来提升性能. 所有卷积层都是同样大小的filte ...
- 『TensorFlow』读书笔记_ResNet_V2
『PyTorch × TensorFlow』第十七弹_ResNet快速实现 要点 神经网络逐层加深有Degradiation问题,准确率先上升到饱和,再加深会下降,这不是过拟合,是测试集和训练集同时下 ...
- 『TensorFlow』读书笔记_进阶卷积神经网络_分类cifar10_下
数据读取部分实现 文中采用了tensorflow的从文件直接读取数据的方式,逻辑流程如下, 实现如下, # Author : Hellcat # Time : 2017/12/9 import os ...
- 『TensorFlow』读书笔记_简单卷积神经网络
如果你可视化CNN的各层级结构,你会发现里面的每一层神经元的激活态都对应了一种特定的信息,越是底层的,就越接近画面的纹理信息,如同物品的材质. 越是上层的,就越接近实际内容(能说出来是个什么东西的那些 ...
- 『TensorFlow』读书笔记_进阶卷积神经网络_分类cifar10_上
完整项目见:Github 完整项目中最终使用了ResNet进行分类,而卷积版本较本篇中结构为了提升训练效果也略有改动 本节主要介绍进阶的卷积神经网络设计相关,数据读入以及增强在下一节再与介绍 网络相关 ...
- 『TensorFlow』读书笔记_SoftMax分类器
开坑之前 今年3.4月份的时候就买了这本书,同时还买了另外一本更为浅显的书,当时读不懂这本,所以一度以为这本书很一般,前些日子看见知乎有人推荐它,也就拿出来翻翻看,发现写的的确蛮好,只是稍微深一点,当 ...
- 『TensorFlow』读书笔记_多层感知机
多层感知机 输入->线性变换->Relu激活->线性变换->Softmax分类 多层感知机将mnist的结果提升到了98%左右的水平 知识点 过拟合:采用dropout解决,本 ...
随机推荐
- WebDriver API--元素定位
WebDriver属于Selenium体系中设计出来操作浏览器的一套API, 站在WebDriver的角度, 因为它针对多种编程语言都实现了一遍这套API,所以它可以支持多种编程语言: 站在编程语言的 ...
- CentOS下rpm命令详解
CentOS下rpm命令详解 rpm,Redhat Package Manager,即为红帽公司为RHEL开发的专用包管理器,后来更改为RPM Package Manager,类似于GNU项目,使用递 ...
- 去掉Tomcat的管理页面
一.去掉Tomcat的管理页面 一.方法一:如果要去掉默认该界面,可以重命名tomcat目录下的ROOT,并新建空文件夹命名为ROOT 1.刚打开tomcat,默认访问的是tomcat管理页面,比如X ...
- Nginx、Tomcat配置https
一.Nginx.Tomcat配置https 前提就是已经得到了CA机构颁发的证书 一.合并证书 1.假设证书文件如下 秘钥文件server.key,证书CACertificate-INTERMEDIA ...
- 21 python的魔法方法(转)
魔法方法 含义 基本的魔法方法 __new__(cls[, ...]) 1. __new__ 是在一个对象实例化的时候所调用的第一个方法2. 它的第一个参数是这个类,其他的参数是用来直接传递给 _ ...
- poj3155 最大密度子图
求最大密度子图 记得在最后一次寻找的时候记得将进入的边放大那么一点点,这样有利于当每条边都满流的情况下会选择点 #include <iostream> #include <algor ...
- 牛客网 完数VS盈数
题目链接:https://www.nowcoder.com/practice/ccc3d1e78014486fb7eed3c50e05c99d?tpId=40&tqId=21351&t ...
- C# 生成 COM控件
C#编写COM组件 软件:Microsoft VisualStudio 2010 1.新建一个类库项目 2.将Class1.cs改为我们想要的名字(例如:MyClass.cs) 问是否同时给类改名,确 ...
- 获取JS数组中所有重复元素
//获取数组内所有重复元素,并以数组返回 //例:入参数组['1','2','4','7','1','2','2'] 返回数组:['1','2'] function GetRepeatFwxmmc(a ...
- 爬起点小说 day02
总的来说起点小说还是挺好爬的,就是爬取小说的时候太慢了,4000多本小说就爬了2天一夜 首先爬取的是网页的所有类别,并把类别名存入到mongodb中,链接存到redis中: import scrapy ...