[ROS]2 尝试编译OrbSLAM
主要参考http://blog.csdn.net/dourenyin/article/details/48055441
1.编译g2o的过程中,
先是出现Eigen3依赖项的问题,要求Eigen3最低版本是3.1.0,而我的ROS上的版本是3.0.5.
于是下载了一个3.2.7的包进行编译并安装。
执行make命令,又出现如下两个错误。

解决方法:通过命令查看
$ gcc -march=native -Q --help=target | grep march
接下来修改CMakelists.txt文件
SET(CMAKE_CXX_FLAGS)项中-march=native中的native 设置成corei7-avx https://github.com/raulmur/ORB_SLAM 此处安装部分有具体说明。
参考:http://stackoverflow.com/questions/17126593/compile-errors-with-assembler-messages

2.编译OpenCV的时候出现如下错误:
make[2]: *** [modules/nonfree/CMakeFiles/opencv_perf_nonfree.dir/perf/perf_main.cpp.o] Error 1
make[1]: *** [modules/nonfree/CMakeFiles/opencv_perf_nonfree.dir/all] Error 2
make: ***[all] Error 2
在编译之前执行如下命令,怀疑会有后遗症,参考http://stackoverflow.com/questions/25354147/error-building-opencv-dumpopencldevice-method-error
cmake -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local -D WITH_OPENCL=OFF -D WITH_CUDA=OFF -D BUILD_opencv_gpu=OFF -D BUILD_opencv_nonfree=OFF -D BUILD_opencv_stitching=OFF -D BUILD_opencv_superres=OFF ..
3.编译OrbSLAM的时候注意文件夹名称和ROS工作空间名称为ORB_SLAM.
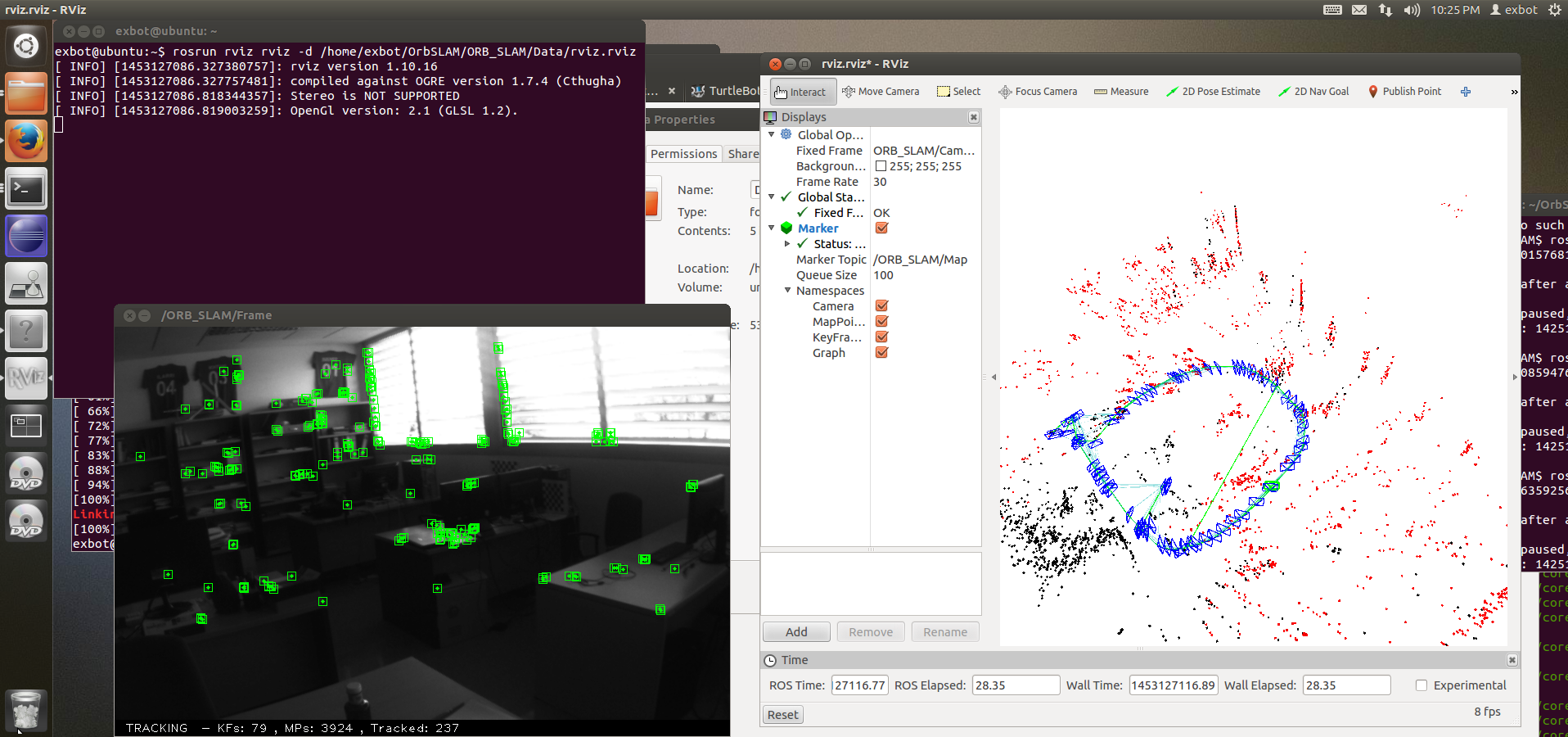
自己录了个视频记录一下成果http://www.tudou.com/programs/view/da6nQ9x6LWE/
[ROS]2 尝试编译OrbSLAM的更多相关文章
- ROS Learning-006 beginner_Tutorials 编译ROS程序包
ROS Indigo beginner_Tutorials-05 编译 ROS 程序包 我使用的虚拟机软件:VMware Workstation 11 使用的Ubuntu系统:Ubuntu 14.04 ...
- ROS:ubuntu-Ros使用OrbSLAM
一般无误的官方连接:https://github.com/raulmur/ORB_SLAM ubuntu16.04没有多少改变,还是使用kinetic老代替indigo Related Publica ...
- Mac OS X上尝试编译CoreCLR源代码
CoreCLR登陆GitHub之后,体验CoreCLR首当其冲的方式就是在自己的电脑上编译它,昨天分别在Windows与Linux上成功编译了CoreCLR,详见: 1)Windows上成功编译Cor ...
- ubuntu16.04运行ros的时候编译工作空间catkin_make出现的一个问题Could not find a package configuration file provided by
最近在进行ros里面的gazebo仿真之前需要对自己创建的工作空间进行编译,但是进行编译的时候输入catkin_make出现如下错误提示 查阅ROS问答社区之后发现两个比较有用的链接,如下 https ...
- ros 安装c++编译的可执行文件
xxx为c++源文件名 install( TARGETS xxx ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION} LIBRARY DESTI ...
- ubuntu16.04下用笔记本摄像头和ROS编译运行ORB_SLAM2的单目AR例程
要编译ORB_SLAM2的ROS例程首先需要安装ROS,以及在ROS下安装usb_cam驱动并调用,最后搭建ORB_SLAM2. 1.ROS的安装 我的电脑安装的是ubuntu16.04系统,所以我安 ...
- ROS知识(3)----功能包package编译的两种方式
ROS的包编译有两种方法(我知道的),一种是用rosmake,这种方法简单:另一种是用catkin_make,这种方法更方便包的管理和开发.这两种方法都是先建立工作空间workspace(类似于vs下 ...
- 【神经网络与深度学习】【CUDA开发】caffe-windows win32下的编译尝试
[神经网络与深度学习][CUDA开发]caffe-windows win32下的编译尝试 标签:[神经网络与深度学习] [CUDA开发] 主要是在开发Qt的应用程序时,需要的是有一个使用的库文件也只是 ...
- Ros系列_学习一
刚入门ROS,不,没入门,还在门口,这是今天的总结: (一)创建一个工作空间 1.创建一个初始工作空间: mkdir -p ~/catkin_ws/src cd ~/catkin_ws/src cat ...
随机推荐
- Export-XLSX PowerShell generate real Excel XLSX files without Excel and COM
http://gallery.technet.microsoft.com/scriptcenter/Export-XLSX-PowerShell-f2f0c035
- 如何搭建redis扩展-Yii中文网
原文链接: 如何搭建redis扩展http://www.yii-china.com/post/detail/43.html 安装redis扩展: 1.通过composer进行安装,到项目根目录cmd运 ...
- 每天学点GDB 11
为了跟踪glibc库中函数的执行,需要带有debug symbol的glibc, 如果是debian或者是基于debian的发行版本如ubuntu和linuxmint之类的,很简单执行如下指令安装即可 ...
- 每天php函数 - floatval() 获取变量的浮点值
float floatval ( mixed $var ) 返回变量 var的 float 数值. var 可以是任何标量类型.你不能将 floatval() 用于数组或对象. <?php$va ...
- ip sevices
http://www.ip138.com/ip2city.asp http://www.bliao.com/ip.phtml http://www.whereismyip.com/ http://ww ...
- nginx服务器安装与启动
nginx服务器介绍 1.nginx服务器功能 nginx服务器可以扮演:轻量级的web服务器.应用服务器.代理服务器.反向代理服务器.后台服务器.CDN缓存服务器 nginx的基本模块: 内核模块C ...
- Git 忽略一些文件不加入版本控制
在git中如果想忽略掉某个文件,不让这个文件提交到版本库中,可以使用修改 .gitignore 文件的方法.这个文件每一行保存了一个匹配的规则例如: # 此为注释 – 将被 Git 忽略 *.a ...
- Subset sum problem
https://en.wikipedia.org/wiki/Subset_sum_problem In computer science, the subset sum problem is an i ...
- Why Apache Beam? A data Artisans perspective
https://cloud.google.com/dataflow/blog/dataflow-beam-and-spark-comparison https://github.com/apache/ ...
- Kafka可靠性的思考
首先kafka的throughput 很牛逼,参考:http://engineering.linkedin.com/kafka/benchmarking-apache-kafka-2-million- ...