数据结构与算法——图(游戏中的自动寻路-A*算法)
在复杂的 3D 游戏环境中如何能使非玩家控制角色准确实现自动寻路功能成为了 3D 游戏开 发技术中一大研究热点。其中 A*算法得到了大量的运用,A*算法较之传统的路径规划算法,实时性更高、灵活性更强,寻路 结果更加接近人工选择的路径结果. A*寻路算法并不是找到最优路径,只是找到相对近的路径,因为找最优要把所有可行 路径都找出来进行对比,消耗性能太大,寻路效果只要相对近路径就行了。

1.A* 算法的原理(如显示不全 刷新重试)
我们假设在推箱子游戏中人要从站里的地方移动到右侧的箱子目的地,但是这两点之间被一堵墙隔开。
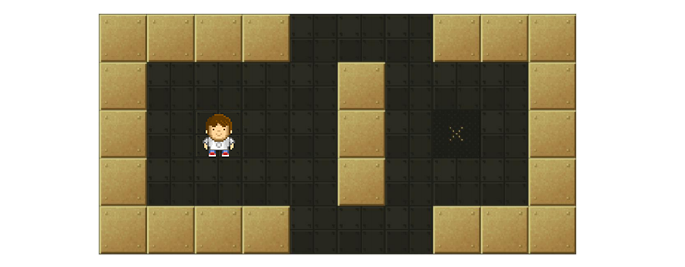
我们下一步要做的便是查找最短路径。既然是 AI 算法, A* 算法和人寻找路径的做法十分类似,当我们离目标较远时,我 们的目标方向是朝向目的点直线移动,但是在近距离上因为各种障碍需要绕行(走弯路)!而且已走过的地方就无须再次 尝试。
为了简化问题,我们把要搜寻的区域划分成了正方形的格子。这是寻路的第一步,简化搜索区域,就像推箱子游戏一样。 这样就把我们的搜索区域简化为了 2 维数组。数组的每一项代表一个格子,它的状态就是可走 (walkalbe) 和不可走 (unwalkable) 。通过计算出从起点到终点需要走过哪些方格,就找到了路径。一旦路径找到了,人物便从一个方格的中心 移动到另一个方格的中心,直至到达目的地。
简化搜索区域以后,如何定义小人当前走要走的格子离终点是近是远呢?我们需要两个指标来表示:
- G 表示从起点移动到网格上指定方格的移动距离 (暂时不考虑沿斜向移动,只考虑上下左右移动)。
- H 表示从指定的方格移动到终点的预计移动距离,只计算直线距离 (H 有很多计算方法, 这里我们设定只可以上 下左右移动,即该点与终点的直线距离)。
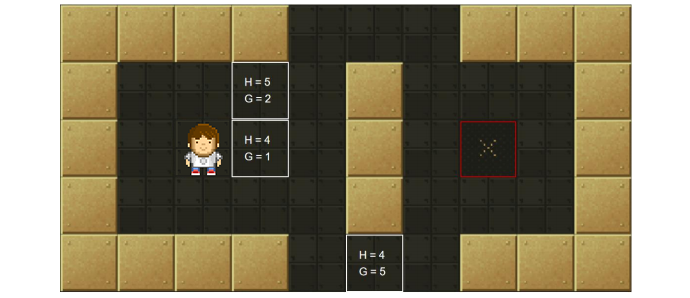
令 F = G + H ,F 即表示从起点经过此点预计到终点的总移动距离接下来我们从起点开始,按照以下寻路步骤,直至找到目标。
2.寻路步骤
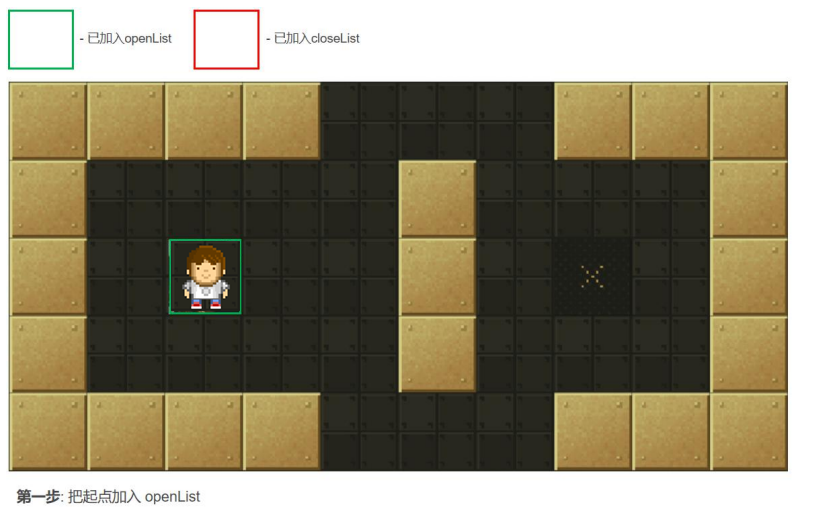
1. 从起点开始, 把它作为待处理的方格存入一个预测可达的节点列表,简称 openList, 即把起点放入“预测可达节点列表”, 可达节点列表 openList 就是一个等待检查方格的列表。
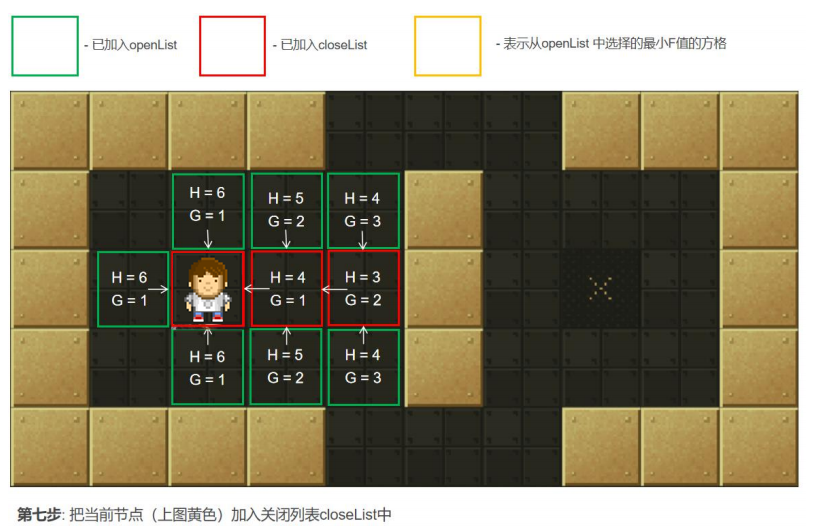
2. 寻找 openList 中 F 值最小的点 min(一开始只有起点)周围可以到达的方格(可到达的意思是其不是障碍物,也不存 在关闭列表中的方格,即不是已走过的方格)。计算 min 周围可到达的方格的 F 值。将还没在 openList 中点放入其中, 并 设置它们的"父方格"为点 min,表示他们的上一步是经过 min 到达的。如果 min 下一步某个可到达的方格已经在 openList 列表那么并且经 min 点它的 F 值更优,则修改 F 值并把其"父方格"设为点 min。
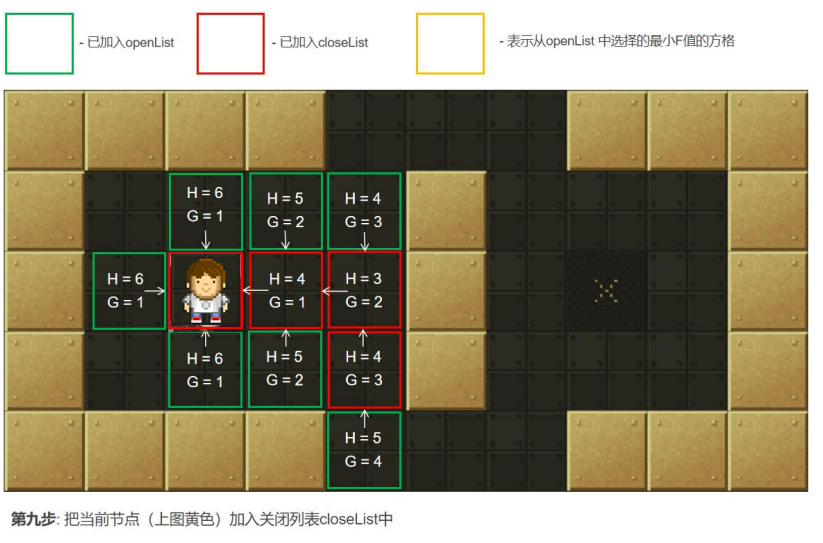
3. 把 2 中的点 min 从"开启列表"中删除并存入"关闭列表"closeList 中, closeList 中存放的都是不需要再次检查的方格。如 果 2 中点 min 不是终点并且开启列表的数量大于零,那么继续从第 2 步开始。如果是终点执行第 4 步,如果 openList 列 表数量为零,那么就是找不到有效路径。
4.如果第 3 步中 min 是终点,则结束查找,直接追溯父节点到起点的路径即为所选路径
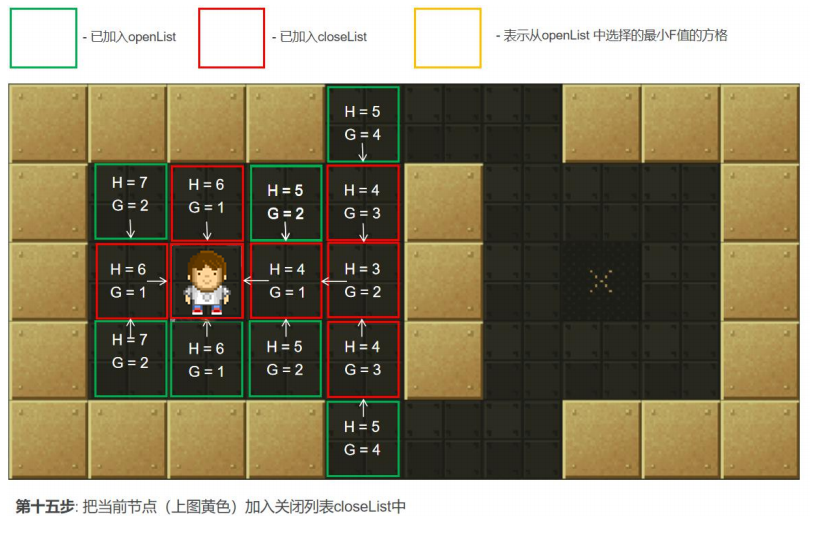
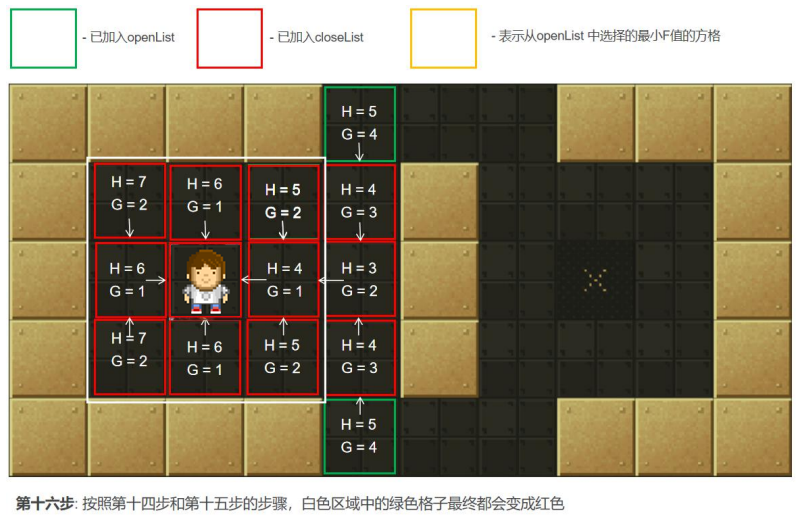
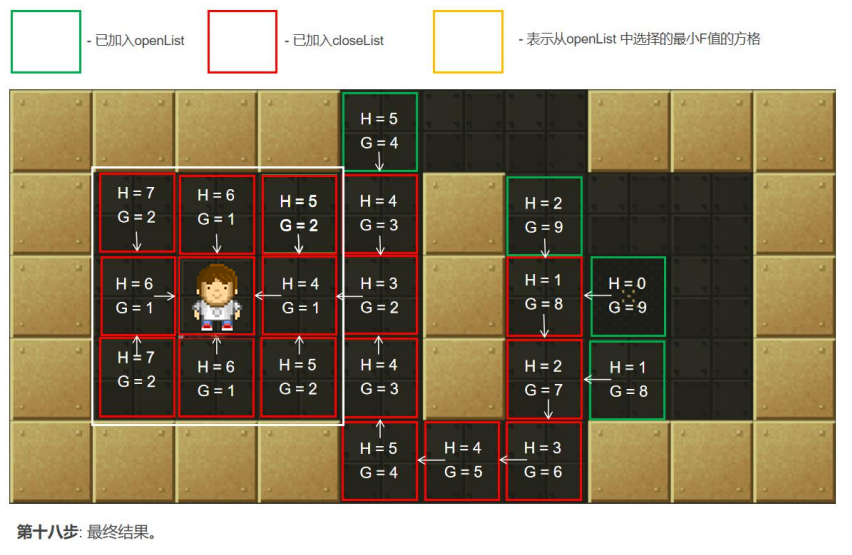
具体寻路步步骤如下所示:












3.算法实现
Astar.h
1 #pragma once
2
3 #include <list>
4
5 const int kCost1 = 10; //直移一格消耗
6 const int kCost2 = 14; //斜移一格消耗
7
8 typedef struct _Point
9 {
10 int x,y; //点坐标,这里为了方便按照 C++的数组来计算,x 代表横排,y 代表竖列
11 int F,G,H; //F=G+H
12 struct _Point *parent; //parent 的坐标
13 }Point;
14
15 /*分配一个节点(格子)*/
16 Point* AllocPoint(int x, int y);
17
18 /*初始化地图*/
19 void InitAstarMaze(int *_maze, int _lines, int _colums);
20
21 /*通过 A* 算法寻找路径*/
22 std::list<Point *> GetPath(Point *startPoint, Point *endPoint);
23
24 /*清理资源,结束后必须调用*/
25 void ClearAstarMaze();
Astar.cpp
1 #include <math.h>
2 #include "Astar.h"
3 #include <iostream>
4 #include <vector>
5
6 static int *maze; //迷宫对应的二维数组,使用一级指针表示
7 static int cols; //二维数组对应的列数
8 static int lines; //二维数组对应的行数
9 static std::list<Point *> openList; //开放列表
10 static std::list<Point *> closeList; //关闭列表
11
12 /*搜索从起点到终点的最佳路径*/
13 static Point* findPath(Point *startPoint,Point *endPoint) ;
14 /*从开启列表中返回 F 值最小的节点*/
15 static Point *getLeastFpoint();
16 /*获取当前点周围可达的节点*/
17 static std::vector<Point *> getSurroundPoints(const Point *point);
18 /*判断某点是否可以用于下一步判断 */
19 static bool isCanreach(const Point *point,const Point *target);
20 /*判断开放/关闭列表中是否包含某点*/
21 static Point *isInList(const std::list<Point *> &list,const Point *point);
22 //计算 FGH 值
23 static int calcG(Point *temp_start,Point *point);
24 static int calcH(Point *point,Point *end);
25 static int calcF(Point *point);
26
27 /*分配一个节点(格子)*/
28 Point* AllocPoint(int x, int y)
29 {
30 Point *temp = new Point;
31 memset(temp, 0, sizeof(Point)); //初始值清零
32 temp->x = x;
33 temp->y = y;
34 return temp;
35 }
36
37 /*初始化 A*搜索的地图*/
38 void InitAstarMaze(int *_maze, int _lines, int _colums)
39 {
40 maze = _maze;
41 lines = _lines;
42 cols = _colums;
43 }
44
45 /*通过 A* 算法寻找路径*/
46 std::list<Point *> GetPath(Point *startPoint, Point *endPoint)
47 {
48 Point *result=findPath(startPoint, endPoint);
49 std::list<Point *> path;
50
51 //返回路径,如果没找到路径,返回空链表
52 while(result)
53 {
54 path.push_front(result);
55 result=result->parent;
56 }
57 return path;
58 }
59
60 /*搜索从起点到终点的最佳路径*/
61 static Point* findPath(Point *startPoint,Point *endPoint)
62 {
63 openList.push_back(AllocPoint(startPoint->x, startPoint->y)); //置入起点,拷贝开辟一个节点,内外隔离
64 while(!openList.empty())
65 {
66 //第一步,从开放列表中取最小 F 的节点
67 Point *curPoint = getLeastFpoint(); //找到 F 值最小的点
68
69 //第二步,把当前节点放到关闭列表中
70 openList.remove(curPoint);
71 closeList.push_back(curPoint);
72
73 //第三步,找到当前节点周围可达的节点,并计算 F 值
74 std::vector<Point *> surroundPoints = getSurroundPoints(curPoint);
75 std::vector<Point *>::const_iterator iter;
76
77 for(iter=surroundPoints.begin();iter!=surroundPoints.end(); iter++)
78 {
79 Point *target = *iter;
80
81 //对某一个格子,如果它不在开放列表中,加入到开启列表,设置当前格为其父节点,计算 F G H
82 Point *exist = isInList(openList, target);
83 if(!exist)
84 {
85 target->parent=curPoint;
86 target->G=calcG(curPoint,target);
87 target->H=calcH(target,endPoint);
88 target->F=calcF(target);
89 openList.push_back(target);
90 }
91 else
92 {
93 int tempG = calcG(curPoint, target);
94 if(tempG<target->G)
95 {
96 exist->parent = curPoint;
97 exist->G=tempG;
98 exist->F=calcF(target);
99 }
100 delete target;
101 }
102 }//end for
103
104 surroundPoints.clear();
105 Point *resPoint = isInList(openList, endPoint);
106 if(resPoint)
107 {
108 return resPoint;
109 }
110 }
111 return NULL;
112 }
113
114 /*从开启列表中返回 F 值最小的节点*/
115 static Point *getLeastFpoint()
116 {
117 if(!openList.empty())
118 {
119 Point *resPoint = openList.front();
120 std::list<Point*>::const_iterator itor;
121
122 for(itor = openList.begin(); itor!= openList.end(); itor++)
123 {
124 if((*itor)->F < resPoint->F)
125 {
126 resPoint = *itor;
127 }
128 }
129 return resPoint;
130 }
131 return NULL;
132 }
133
134 /*获取当前点周围可达的节点*/
135 static std::vector<Point *> getSurroundPoints(const Point *point)
136 {
137 std::vector<Point *> surroundPoints;
138 for(int x=point->x-1; x<=point->x+1; x++)
139 {
140 for(int y=point->y-1; y<=point->y+1; y++)
141 {
142 Point *temp = AllocPoint(x, y);
143 if(isCanreach(point, temp))
144 {
145 surroundPoints.push_back(temp);
146 }
147 else
148 {
149 delete temp;
150 }
151 }
152 }
153 return surroundPoints;
154 }
155
156 /*判断某点是否可以用于下一步判断 */
157 static bool isCanreach(const Point *point,const Point *target)
158 {
159 if(target->x<0||target->x>(lines-1)
160 ||target->y<0||target->y>(cols-1)
161 ||maze[target->x *cols + target->y]==1
162 ||maze[target->x *cols + target->y]==2
163 ||(target->x==point->x && target->y==point->y)
164 ||isInList(closeList, target))
165 {
166 return false;
167 }
168 if(abs(point->x-target->x)+abs(point->y-target->y)==1)
169 {
170 return true;
171 }
172 else
173 {
174 return false;
175 }
176 }
177 static Point* isInList(const std::list<Point *> &list,const Point *point)
178 {
179 //判断某个节点是否在列表中,这里不能比较指针,因为每次加入列表是新开辟的节点,只能比较坐标
180 std::list<Point *>::const_iterator itor;
181 for(itor = list.begin(); itor!=list.end();itor++)
182 {
183 if((*itor)->x==point->x&&(*itor)->y==point->y)
184 {
185 return *itor;
186 }
187 }
188 return NULL;
189 }
190
191 /*计算节点的 G 值*/
192 static int calcG(Point *temp_start, Point *point)
193 {
194 int extraG=(abs(point->x-temp_start->x)+abs(point->y-temp_start->y))==1?kCost1:kCost2;
195
196 //如果是初始节点,则其父节点是空
197 int parentG=(point->parent==NULL? NULL:point->parent->G);
198
199 return parentG+extraG;
200 }
201
202 static int calcH(Point *point,Point *end)
203 {
204 //用简单的欧几里得距离计算 H,可以用多中方式实现
205 return (int)sqrt((double)(end->x-point->x)*
206 (double)(end->x-point->x)+(double)(end->y-point->y)*
207 (double)(end->y-point->y))*kCost1;
208 }
209
210 /*计算节点的 F 值*/
211 static int calcF(Point *point)
212 {
213 return point->G+ point->H;
214 }
215
216 /*清理资源,结束后必须调用*/
217 void ClearAstarMaze()
218 {
219 maze = NULL;
220 lines = 0;
221 cols = 0;
222 std::list<Point *>::iterator itor;
223
224 //清除 openList 中的元素
225 for(itor = openList.begin(); itor!=openList.end();)
226 {
227 delete *itor;
228 itor = openList.erase(itor);//获取到下一个节点
229 }
230
231 //清理 closeList 中的元素
232 for(itor = closeList.begin(); itor!=closeList.end();)
233 {
234 delete *itor;
235 itor = closeList.erase(itor);
236 }
237 }
main.cpp
1 #include "Astar.h"
2 #include <list>
3 #include <iostream>
4 #include <windows.h>
5
6 using namespace std;
7
8 //定义地图数组,二维数组在内存顺序存储的
9 int map[13][13] = {
10 { 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, },
11 { 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, },
12 { 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, },
13 { 0, 1, 0, 1, 0, 1, 2, 1, 0, 1, 0, 1, 0, },
14 { 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, },
15 { 0, 1, 0, 1, 0, 0, 0, 1, 0, 1, 0, 1, 0, },
16 { 0, 0, 0, 0, 0, 1, 0, 1, 0, 0, 0, 0, 0, },
17 { 2, 0, 1, 1, 0, 0, 0, 1, 0, 1, 1, 0, 2, },
18 { 0, 0, 0, 0, 0, 1, 1, 1, 0, 0, 0, 0, 0, },
19 { 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, },
20 { 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, },
21 { 0, 1, 0, 1, 0, 0, 0, 0, 0, 1, 0, 1, 0, },
22 { 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, }
23 };
24
25 void AStarTest()
26 {
27 InitAstarMaze(&map[0][0], 13, 13);
28
29 //设置起始和结束点
30 Point* start = AllocPoint(12, 4);
31 Point* end = AllocPoint(0, 0);
32
33 //A*算法找寻路径
34 list<Point *> path = GetPath(start, end);
35 cout<<"寻路结果:"<<endl;
36 list<Point *>::const_iterator iter;
37
38 for(iter=path.begin(); iter!=path.end(); iter++)
39 {
40 Point *cur = *iter;
41 cout<<'('<<cur->x<<','<<cur->y<<')'<<endl;
42 Sleep(800);
43 }
44
45 ClearAstarMaze();
46 }
47
48 int main(void)
49 {
50 AStarTest();
51 system("pause");
52 return 0;
53 }
============================================================================================================
数据结构与算法——图(游戏中的自动寻路-A*算法)的更多相关文章
- 游戏中的自动寻路-A*算法(第一版优化——走斜线篇)
一.简述以及地图 G 表示从起点移动到网格上指定方格的移动距离 (暂时不考虑沿斜向移动,只考虑上下左右移动). H 表示从指定的方格移动到终点的预计移动距离,只计算直线距离,走直角篇走的是直角路线. ...
- 如何在Cocos2D游戏中实现A*寻路算法(一)
大熊猫猪·侯佩原创或翻译作品.欢迎转载,转载请注明出处. 如果觉得写的不好请告诉我,如果觉得不错请多多支持点赞.谢谢! hopy ;) 免责申明:本博客提供的所有翻译文章原稿均来自互联网,仅供学习交流 ...
- 如何在Cocos2D游戏中实现A*寻路算法(八)
大熊猫猪·侯佩原创或翻译作品.欢迎转载,转载请注明出处. 如果觉得写的不好请告诉我,如果觉得不错请多多支持点赞.谢谢! hopy ;) 免责申明:本博客提供的所有翻译文章原稿均来自互联网,仅供学习交流 ...
- 如何在Cocos2D游戏中实现A*寻路算法(六)
大熊猫猪·侯佩原创或翻译作品.欢迎转载,转载请注明出处. 如果觉得写的不好请告诉我,如果觉得不错请多多支持点赞.谢谢! hopy ;) 免责申明:本博客提供的所有翻译文章原稿均来自互联网,仅供学习交流 ...
- 如何在Cocos2D游戏中实现A*寻路算法(四)
大熊猫猪·侯佩原创或翻译作品.欢迎转载,转载请注明出处. 如果觉得写的不好请告诉我,如果觉得不错请多多支持点赞.谢谢! hopy ;) 免责申明:本博客提供的所有翻译文章原稿均来自互联网,仅供学习交流 ...
- python数据结构与算法——图的广度优先和深度优先的算法
根据维基百科的伪代码实现: 广度优先BFS: 使用队列,集合 标记初始结点已被发现,放入队列 每次循环从队列弹出一个结点 将该节点的所有相连结点放入队列,并标记已被发现 通过队列,将迷宫路口所有的门打 ...
- 如何在Cocos2D游戏中实现A*寻路算法(二)
大熊猫猪·侯佩原创或翻译作品.欢迎转载,转载请注明出处. 如果觉得写的不好请告诉我,如果觉得不错请多多支持点赞.谢谢! hopy ;) 免责申明:本博客提供的所有翻译文章原稿均来自互联网,仅供学习交流 ...
- 如何在Cocos2D游戏中实现A*寻路算法(七)
大熊猫猪·侯佩原创或翻译作品.欢迎转载,转载请注明出处. 如果觉得写的不好请告诉我,如果觉得不错请多多支持点赞.谢谢! hopy ;) 免责申明:本博客提供的所有翻译文章原稿均来自互联网,仅供学习交流 ...
- 如何在Cocos2D游戏中实现A*寻路算法(五)
大熊猫猪·侯佩原创或翻译作品.欢迎转载,转载请注明出处. 如果觉得写的不好请告诉我,如果觉得不错请多多支持点赞.谢谢! hopy ;) 免责申明:本博客提供的所有翻译文章原稿均来自互联网,仅供学习交流 ...
随机推荐
- ubuntu掉电出现检查文件系统的问题
修改: /etc/default/rcS FSCKFIX=no 为 FSCKFIX=yes 出现这个情况的原因是硬件时钟偏移了 显示上次挂载根目录在未来时间. 写于: 2013年11月28日 更新于: ...
- SQL SERVER数据库使用过程中系统提示死锁处理办法
马上双节(国庆节.中秋节)了,这篇文章是双节前的最后一篇,祈祷过节期间,数据库稳定运行,服务器正常发挥.祝大家假期愉快!!!! 任何的数据库都会出现死锁的情况,特别是一些大型的复杂业务,数据库架构的设 ...
- HDU100题简要题解(2030~2039)
HDU2030 汉字统计 题目链接 Problem Description 统计给定文本文件中汉字的个数. Input 输入文件首先包含一个整数n,表示测试实例的个数,然后是n段文本. Output ...
- Hadoop大数据平台节点的动态增删
环境:CentOS 7.4 (1708 DVD) 工具:MobaXterm 一. 节点的动态增加 1. 为新增加的节点(主机)配置免密码登录.使用ssh-keygen和ssh-copy-id命令(详 ...
- cProfile分析程序性能
Python标准库中提供了三种用来分析程序性能的模块,分别是cProfile, profile和hotshot,另外还有一个辅助模块stats.这些模块提供了对Python程序的确定性分析功能,同时也 ...
- MathType总结编辑括号的类型(中)
MathType中的符号模板多种多样,能够满足各类用户的使用需求.即使是一些不常用的符号也有相应的模板,因为在工作学习中我们都需要他们,只是有的用的多有的用的少而已,下面我们就一起来看看公式编辑器编辑 ...
- Gradle全局代理配置
配置文件路径:C:\Users\myName\.gradle\gradle.properties 代理配置内容: systemProp.http.proxyHost=127.0.0.1 systemP ...
- FL Studio新手入门:FL Studio五大常用按钮介绍
我们打开FL Studio编曲软件会发现界面中有好多的菜单和窗口,这些窗口每个都有其单独的功能.今天小编主要给大家详细讲解下FL Studio水果软件的五大常用按钮. 1.首先我,我们双击桌面的水果图 ...
- shardingsphere与分布式事务
rt https://blog.csdn.net/l1028386804/article/details/79769043 https://blog.csdn.net/qq_20387013/arti ...
- EggJS 云原生应用硬核实战(Kubernetes+Traefik+Helm+Prometheus+Grafana),提供 Demo
介绍 这是一个关于 Egg.js 应用上云️的示例,笔者所在的大前端团队的已应用于生产. CI/CD & DevOps & GitOps & HPA 等这里暂不做讨论,因为每一 ...