实现图像上像素点与实际位置的GPS对应
作者有话说
这篇随笔是基于我自己完成的一个项目,这个项目虽然看起来较为简单,但是由于我本身不是学这个方向的,因此在做的过程中还是遇到了一些大大小小的问题。经过仔细研究并多次调试代码,终于把这个问题的原理弄懂了。下面我将详细介绍该问题的解决过程,并在随笔末尾附上所有相关代码,希望有兴趣的可以一起交流学习。
目录
- 问题介绍
- 相关专业术语介绍
- 解决思路及过程
- 一些值得注意的细节
- 结果
- 参考文献
- MATLAB代码
问题介绍
无人机的出现给拍照录像带来了极大的便利。如下图所示,无人机停留在高为2m的高空中,其所装配的相机的拍摄方向与垂直方向的夹角为60°,利用相机参数求解所拍摄图像上所有像素点的大地坐标,实现图像上所有像素点与实际位置的GPS对应。另外,相机拍摄时的经纬度为(118.8675992,32.032575),相机的焦距为16mm,成像像素长和宽分别为4.65µm和3.9µm。
相关名词介绍
- 焦距:焦距指镜头等效光心到相机传感器的距离。
- 大地坐标:大地测量中以参考椭球面(本文是以地球表面)为基准面的坐标。地面点P的位置用大地经度L、大地纬度B和大地高H表示。当点在参考椭球面上时,仅用大地经度和大地纬度表示。大地经度是通过该点的大地子午面与起始大地子午面之间的夹角,大地纬度是通过该点的法线与赤道面的夹角,大地高是地面点沿法线到参考椭球面的距离。
- 高斯平面坐标系:指的是以中央子午线与赤道的交点作为坐标原点,以中央子午线的投影为纵坐标轴X,规定X轴向北为正,以赤道的投影为横坐标轴Y,Y轴向东为正,形成的坐标系。
解决思路及过程
考虑到地球是椭球形状的,而经纬度是大地坐标,不方便计算,所以先利用高斯投影正算公式将大地平面坐标转换为高斯平面坐标,高斯平面坐标又和高度构成一个三维空间坐标。根据相机成像原理,把像素正中心坐标作为一个空间坐标,把相机中心坐标作为一个空间坐标,过这两点的直线与高斯平面的交点就是这个像素点所对应的实际位置。
- 具体步骤
- 我们将相机所在地理位置的大地坐标通过高斯正变换转换成高斯平面坐标,高斯平面加上高度构成了三维空间,所以就实现了每个点都有一个三维坐标与其对应。
- 我们根据焦距、相机中心的空间坐标、和角度确定出图像上每个像素点所对应的空间坐标。
- 根据像素点坐标和相机中心坐标求出像素点所对应的实际位置高斯平面中的坐标。
- 将步骤3得到的实际位置的高斯坐标通过高斯逆变换得到其对应的大地坐标。
- 图示说明
下图反映了由图片像素点得到对应实际位置的过程,考虑到成像屏的尺寸相对于拍摄的实物来说非常小,所以我们把这两部分分开画图。图1和图2结合起来表示由像素点对应到实际位置的原理,即过像素点(彩色方格)与相机中心(空心圆点)的射线(彩线)与高斯平面的交点即为像素点对应的实际位置(射线终点)。
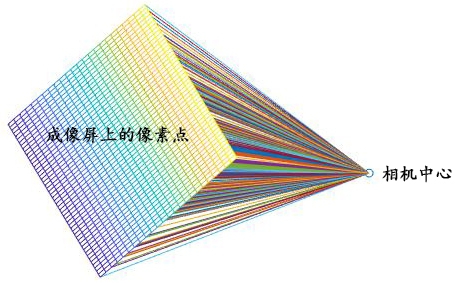
图1 光线从相机中心到像素点示意图
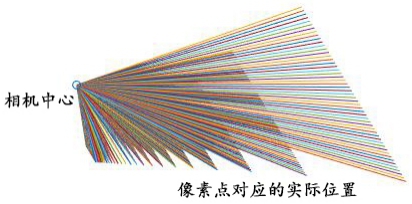
图2 光线从实际位置到相机中心示意图(斜视)

图3 光线从实际位置到相机中心示意图(俯视)
- 高斯投影说明
- 高斯投影正算公式
- 高斯投影反算公式
1.已知大地坐标$\left ( B,L \right )$及中央子午线经度$L_{0}$,计算高斯平面坐标$\left ( x,y \right )$,公式如下:
$ x=X+\frac{N}{2}sin\left ( B \right )cos\left ( B \right )l^{2}+\frac{N}{24}sin\left ( B \right )cos^{3}\left ( B \right )\left ( 5-t^{2}+9\eta ^{2}+4\eta ^{4} \right )l^{4}+\frac{N}{720}sin\left ( B \right )cos^{5}\left ( B \right )( 61-58t^{4}+270\eta ^{2}-330\eta ^{2}t^{2})l^{6}$
$y=Ncos\left ( B \right )l+\frac{N}{6}cos^{3}\left ( B \right )\left ( 1-t^{2}+\eta ^{2} \right )l^{3}+\frac{N}{120}cos^{5}\left ( B \right )\left ( 5-18t^{2}+t^{4}+14\eta ^{2}-58\eta ^{2}t^{2} \right )l^{5}$
其中,$B$为纬度,$l=L-L_{0}$,单位为弧度,$N=\frac{a}{\sqrt{1-e^{2}sin^{2}\left ( B \right )}}$,为卯酉圈曲率半径,$t=tan\left ( B \right )$,$\eta ^{2}=e^{2}cos^{2}\left ( B \right )$,$e=\frac{\sqrt{a^{2}-b^{2}}}{b}$为第二偏心率,$a$为旋转椭球长半轴,$b$为短半轴,$X$为子午线弧长。
2.已知高斯平面坐标$\left (x,y \right )$及指定中央子午线经度$L_{0}$,计算大地坐标$\left ( B,L \right )$:
$B=B_{f}-\frac{t_{f}}{2M_{f}N_{f}}y^{2}+\frac{t_{f}}{24M_{f}N_{f}^{3}}\left (5+3t_{f}^{2}+\eta _{f}^{2}-9t_{f}^{2}\eta _{f}^{2} \right )y^{4}+\frac{t_{f}}{720M_{f}N_{f}^{5}}\left ( 61+90t_{f}^{2}+45t_{f}^{4} \right )y^{6}$
$L=L_{0}+\frac{1}{N_{f}cos\left ( B_{f} \right )}y-\frac{1}{6N_{f}^{3}cos\left ( B_{f} \right )}\left ( 1+2t_{f}^{2}+\eta _{f}^{2} \right )y^{3}+\frac{1}{120N_{f}^{5}cos\left ( B_{f} \right )}\left ( 5+28t_{f}^{2}+24t_{f}^{4}+6\eta _{f}^{2}+8t_{f}^{2}\eta _{f}^{2} \right )y^{5}$
其中,$N_{f}=\frac{a}{\sqrt{1-e^{2}sin\left ( B_{f} \right )}}$,$M_{f}=\frac{a\left ( 1-e^{2} \right )}{\sqrt{\left (1-e^{2}sin\left ( B_{f} \right ) \right )^{3}}}$,$\eta _{f}^{2}=e^{2}cos^{2}\left ( B_{f} \right )$,$t_{f}=tan\left ( B_{f} \right )$,$B_{f}$为根据子午线弧长$X$反算的底点纬度。
一些值得注意的细节
保证一定的精度:因为像素尺寸非常小,他们所对应的实际位置的经纬度差别也是很小的,我刚处理的时候没有考虑到这个问题,所以导致得到的结果很多都是一样的(结果被截断了)。所以我后来将输出数据的位数设定为10为小数,才看出其差别。
结果
经过编程计算,我们把得到经纬度数据分别根据像素大小画出一张曲面来观察结果的合理性,如下图(图4、图5)所示:
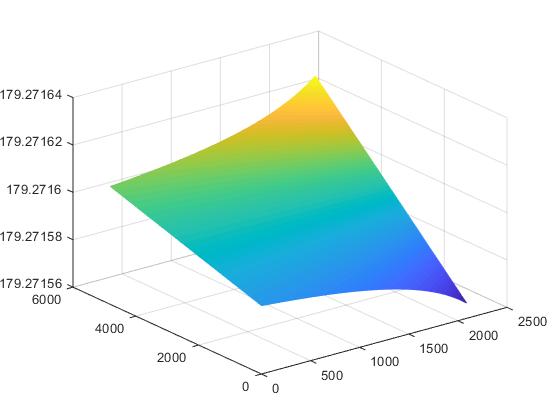
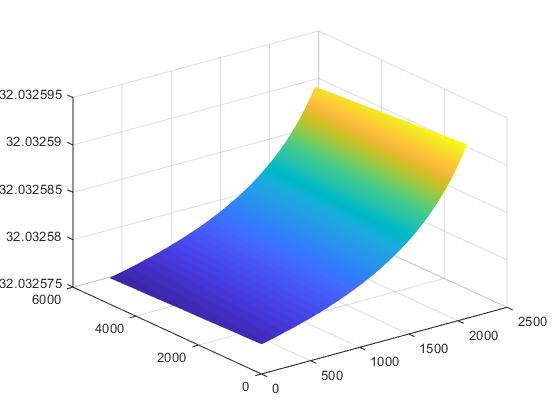
图4:经度 图5:纬度
根据图4和图5,可以看出经纬度变化的连续性和对称性,而且数值又徘徊在相机经纬度坐标周围,因此是合理的。
参考文献链接
matlab大地测量高斯投影正反算程序设计实验 - 百度文库https://wenku.baidu.com/view/121aedfdee06eff9aff807a3.html#
MATLAB代码
main.m
clear all;
clc;
tic
format long
jiaodu=(angle)/180*pi;
PixelLength=4.65/(10^6);
PixelWidth=3.9/(10^6);
ImageSize=[3376 6016];
U_0=ImageSize(1)/2;
V_0=ImageSize(2)/2;
a=6378137;%长半轴
f1=1/298.257223563;%扁率
b=a*(1-f1);%短半轴
e=(sqrt(a^2-b^2))/a;%第一偏心率
e_=(sqrt(a^2-b^2))/b;%第二偏心率
A=[120.2719052 33.1664600];
f=16/(10^3);
global c
c=num2str(floor(A(2)*1000));
c=str2num(c(end));
H=2;
X=latitude2meridian(dms2rad(A(:,2)),a,e);%X为子午线弧长,有纬度B算出
[x,y,L0]=GaussianMapDirect(dms2rad(A(:,2)),dms2degree(A(:,1)),X);
CameraCenter=[x,y,H];
TT=[cos(jiaodu) -sin(jiaodu);sin(jiaodu) cos(jiaodu)];
I=zeros(ImageSize(1),ImageSize(2)*3);
T=zeros(ImageSize(1),ImageSize(2)*2);
MeridianLongitude=L0;
for i=1:ImageSize(1)
for j=1:ImageSize(2)
I(i,(j-1)*3+1:j*3)=ImagePointCoordinates(ImageSize(1),ImageSize(2),i,j,PixelLength,PixelWidth,f,CameraCenter);
P=I(i,(j-1)*3+1:j*3-1)-CameraCenter(1:2);
P=P*TT;
I(i,(j-1)*3+1:j*3-1)=P+CameraCenter(1:2);
[T(i,(j-1)*2+1),T(i,j*2)]=ImagePointMapping(CameraCenter,I(i,(j-1)*3+1:j*3));
[G(i,(j-1)*2+1),G(i,j*2)]=GaussianMapInverse(T(i,(j-1)*2+1),T(i,j*2),dms2rad(MeridianLongitude));
end
end
for i=1:ImageSize(1)
for j=1:1
I(i,(j-1)*3+1:j*3)=ImagePointCoordinates(ImageSize(1),ImageSize(2),i,j,PixelLength,PixelWidth,f,CameraCenter);
P=I(i,(j-1)*3+1:j*3-1)-CameraCenter(1:2);
P=P*TT;
I(i,(j-1)*3+1:j*3-1)=P+CameraCenter(1:2);
[T(i,(j-1)*2+1),T(i,j*2)]=ImagePointMapping(CameraCenter,I(i,(j-1)*3+1:j*3));
[G(i,(j-1)*2+1),G(i,j*2)]=GaussianMapInverse(T(i,(j-1)*2+1),T(i,j*2),dms2rad(MeridianLongitude));
end
end
for i=2:ImageSize(1)
for j=2:ImageSize(2)
if j<=ImageSize(2)/2
I(i,(j-1)*3+2)=I(1,(j-1)*3+2);
I(i,(j-1)*3+1)=I(i,1);
I(i,j*3)=I(i,3);
T(i,(j-1)*2+1)=T(i,1);
[T(i,(j-1)*2+1),T(i,j*2)]=ImagePointMapping(CameraCenter,I(i,(j-1)*3+1:j*3));
[G(i,(j-1)*2+1),G(i,j*2)]=GaussianMapInverse(T(i,(j-1)*2+1),T(i,j*2),dms2rad(MeridianLongitude));
else
T(i,(j-1)*2+1)=T(i,1);
T(i,j*2)=2*CameraCenter(2)-T(i,(ImageSize(2)+1-j)*2);
[G(i,(j-1)*2+1),G(i,j*2)]=GaussianMapInverse(T(i,(j-1)*2+1),T(i,j*2),dms2rad(MeridianLongitude));
end
end
end toc
GaussianTransformation.m
%首先读取文件data1 .txt中的数据,计算其在相应六度带高斯投影带内的高斯平面直角坐标,并存贮在文件data2.txt 中,
%datal.txt格式为:经度( dd.mmss) 纬度( dd.mmss) 大地高
%data2.txt格式为:x(m) y(m) 中央子午线经度(dd.mmss)
clear all;
clc;
[filename,pathname]=uigetfile('*.*');%文件查找窗口
file=fullfile(pathname,filename);%合并路径文件名.
A=importdata(file);%将生成的文件导入工作空间,变量名为A
%RefEllipsoid为椭球参数
%RefEllipsoid=[a,b,c,f,e2,e2_];
a=6378137;%WGS84椭球参数:长半轴
f=1/298.257223563;%扁率
b=a*(1-f);%WGS84椭球参数:短半轴
e=(sqrt(a^2-b^2))/a;
% [a b]=size(A.data);
% A1=[];
% for i=1:a
% data1=A.data(i,:);
% data1=data1(find(isnan(data1)==0));
% A1=[A1;data1];
% end
% A.data=A1;
X=latitude2meridian(dms2rad(A.data(:,2)),a,e);%X为子午线弧长,有纬度B算出
[x,y,L0]=GaussianMapDirect(dms2rad(A.data(:,2)),dms2degree(A.data(:,1)),X);
B=[x,y,L0];
%B为重组矩阵
[filename_out,pathname_out]=uiputfile('*.txt','请输入文件名');
%文件查找窗口
fileout=fullfile(pathname_out,filename_out);
%合并路径文件名
fid=fopen(fileout,'wt');
%新建打开txt文件
fprintf(fid,'x(m) y(m) 中央子午线经度(dd.mms)\n');
[a b]=size(B);
for i=1:a
fprintf(fid,'%f %f %f\n',B(i,:));
end
fclose(fid);
InverseGaussianTransform.m
%然后根据文件data2.txt中的高斯平面直角坐标及其中央子午线经度,计算其经纬度,并将计算结果按照格式存贮在文件data3.txt 中,
%data3.txt格式为:经度(dd.mmss) 纬度(dd.mmss)
clear all;
clc;
format long
[filename,pathname]=uigetfile('*.*');%文件查找窗口
file=fullfile(pathname,filename);%合并路径文件名
A=importdata(file);%将生成的文件导入工作空间,变量名为A
A.data(:,3)=177*ones(10051632,1);
[L,B]=GaussianMapInverse(A.data(:,1),A.data(:,2),dms2rad(A.data(:,3)));
C=[L,B];%C为重组矩阵
[filename_out,pathname_out]=uiputfile('*.txt','请输入文件名');
%文件查找窗口
fileout=fullfile(pathname_out,filename_out);%合并路径文件名
fid=fopen(fileout,'wt');%新建打开txt文件
fprintf(fid,'经度(dd.mmss) 纬度(dd.mmss)\n');
[a b]=size(C);
for i=1:a
fprintf(fid,'%.10f %.10f\n',C(i,:));
end
fclose(fid);
degree2dms.m
function dms=degree2dms(du)
%度一>度分秒(ddmmss)
degree=fix(du);
min=fix((du-degree)*60);
second=(((du-degree)*60-min)*60);
dms=degree+min/100+second/10000;
end
dms2degree.m
function degree=dms2degree(jiaodu)
%度分秒(dd.mmss)->度
degree=fix(jiaodu);
mimute=fix((jiaodu-degree)*100);
second=(jiaodu-degree-mimute/100)*10000;
degree=degree+mimute/60+second/3600;
end
dms2rad.m
function rad=dms2rad(n)
deg=fix(n);%度取所给数n的整数部分
min_tem=(n-deg)*100;%去掉整数部分后小数点后移两位
min=fix(min_tem);%分取整
sec=(min_tem-min)*100;%秒是小数点再向后移两位的数字
rad=(deg+min/60.00+sec/3600)*pi/180.0;
end
GaussianMapDirect.m
function [x,y,L0]=GaussianMapDirect(B,L,X)
%WGS84椭球参数:
a=6378137;%长半轴
f=1/298.257223563;%扁率
b=a*(1-f);%短半轴
e=(sqrt(a^2-b^2))/a;%第一偏心率
e_=(sqrt(a^2-b^2))/b;%第二偏心率
%当地中央子午线决定于当地的直角坐标系统,首先确定您的直角坐标系统是3度带还是6度带投影,然后再根据如下公式推算。
Q=input('请选择投影带:\n');
if Q==6
%6度带:
M=round((L+3)./6);
%带号M=round[(L+3)/6],即对(L+3)/6的值四舍五入取整数,L为当地经度;
L0=6.*M-3 ;
%则中央子午线经度L0=6 X M-3
else
%3度带:
M=round(L./3);%带号M=round([L/3),即对(L/3)的值四舍五入取整数,L为当地经度;
L0=3.*M;
%则中央子午线经度L0=3 X M
end
l=(L-L0).*pi/180;
N=a./(sqrt(1-(e^2).*(sin(B).^2)));
t=tan(B);
p=e_.*cos(B);%p表示yita
%计算高斯平面坐标(x,y)
x=X+(N.*(sin(B)).*(cos(B)).*(l.^2))./2+(N.*(sin(B)).*((cos(B)).^3).*(5-((t).^2)+9.*(p.^2)+4.*(p.^4)).*(l.^4))./24+(N.*sin(B).*(cos(B)).^5.*(61-58.*(t.^2)+(t.^4)+270.*(p.^2)-330.*(p.^2).*(t.^2)).*(l.^6))./720;
y=N.*cos(B).*l+(N.*(cos(B)).^3.*(1-t.^2+p.^2).*(l.^3))./6+(N.*((cos(B)).^5).*(5-18.*(t.^2)+t.^4+14.*(p.^2)-58.*(p.^2).*(t.^2)).*(l.^5))./120;
L0=degree2dms(L0);
end
GaussianMapInverse.m
function [L,B] = GaussianMapInverse(x,y,L0)
%WGS84椭球参数:
a=6378137;%长半轴
f=1/298.257223563; %扁率
b=a*(1-f);%短半轴
e=(sqrt(a^2-b^2))/a;%第- -偏心率
e_=(sqrt(a^2-b^2))/b;%第二偏心率
%根据中央子午线弧长x反算底点纬度Bf
Bf=meridian2latitude(x,a,e);
Nf=a./sqrt(1-(e.^2).*(sin(Bf).^2));
Mf=a.*(1-e.^2)./sqrt((1-(e.^2).*(sin(Bf).^2)).^3);
pf=e_.*cos(Bf);
tf=tan(Bf);
%已知高斯平面坐标(x, y)及指定中央子午线经度L0,计算大地坐标(B,L)
B=Bf-tf.*(y.^2)./(2.*Mf.*Nf)+tf.*(5+3.*(tf.^2)+pf.^2-9.*(tf.^2).*(pf.^2)).*(y.^4)./(24.*Mf.*(Nf.^3))+tf.*(61+90.*(tf.^2)+45.*(tf.^4)).*(y.^6)./(720.*Mf.*(Nf.^5));
L=L0+y./(Nf.*cos(Bf))-(1+2.*(tf.^2)+pf.^2).*y.^3./(6.*(Nf.^3).*cos(Bf))+(5+28.*tf.^2+24.*tf.^4+6.*pf.^2+8.*(tf.^2).*pf.^2).*y.^5./(120.*Nf.^5.*cos(Bf));
B=rad2dms(B);
L=rad2dms(L);
end
ImagePointCoordinates.m
function PixelCoordinates=ImagePointCoordinates(L,H,m,n,PixelLength,PixelWidth,focalLength,CameraCenter)
format long g
HH=H/2;
LL=L/2;
ImageCenter(1)=CameraCenter(1)-focalLength*sin(pi/3);
ImageCenter(2)=CameraCenter(2);
ImageCenter(3)=CameraCenter(3)+focalLength*sin(pi/3);
if m<=HH&&n<=LL
PixelCoordinates(1)=ImageCenter(1)+((HH-m)*PixelWidth+0.5*PixelWidth)*sin(pi/6);
PixelCoordinates(2)=ImageCenter(2)+(LL-n)*PixelLength+0.5*PixelLength;
PixelCoordinates(3)=ImageCenter(3)+((HH-m)*PixelWidth+0.5*PixelWidth)*cos(pi/6);
end
if m<=HH&&n>LL
PixelCoordinates(1)=ImageCenter(1)+((HH-m)*PixelWidth+0.5*PixelWidth)*sin(pi/6);
PixelCoordinates(2)=ImageCenter(2)+(LL-n)*PixelLength-0.5*PixelLength;
PixelCoordinates(3)=ImageCenter(3)+((HH-m)*PixelWidth+0.5*PixelWidth)*cos(pi/6);
end
if m>HH&&n<=LL
PixelCoordinates(1)=ImageCenter(1)+((HH-m)*PixelWidth-0.5*PixelWidth)*sin(pi/6);
PixelCoordinates(2)=ImageCenter(2)+(LL-n)*PixelLength+0.5*PixelLength;
PixelCoordinates(3)=ImageCenter(3)+((HH-m)*PixelWidth-0.5*PixelWidth)*cos(pi/6);
end
if m>HH&&n>LL
PixelCoordinates(1)=ImageCenter(1)+((HH-m)*PixelWidth-0.5*PixelWidth)*sin(pi/6);
PixelCoordinates(2)=ImageCenter(2)+(LL-n)*PixelLength-0.5*PixelLength;
PixelCoordinates(3)=ImageCenter(3)+((HH-m)*PixelWidth-0.5*PixelWidth)*cos(pi/6);
end
ImagePointMapping.m
function [x,y]=ImagePointMapping(CameraCenter,Point)
format long
x=-CameraCenter(3)/(CameraCenter(3)-Point(3))*(CameraCenter(1)-Point(1))+CameraCenter(1);
y=-CameraCenter(3)/(CameraCenter(3)-Point(3))*(CameraCenter(2)-Point(2))+CameraCenter(2);
end
latitude2meridian.m
function x=latitude2meridian(B,a,e)
%由纬度B求对应的子午线弧长x,计算公式
m0=a*(1-e^2);
m2=(3*(e^2)*m0)/2;
m4=(5*(e^2)*m2)/4;
m6=(7*(e^2)*m4)/6;
m8=(9*(e^2)*m6)/8;
a0=m0+m2/2+3*m4/8+5*m6/16+35*m8/128;
a2=m2/2+m4/2+15*m6/32+7*m8/16;
a4=m4/8+3*m6/16+7*m8/32;
a6=m6/32+m8/16;
a8=m8/128;
x=a0*B-(a2*sin(2*B))/2+(a4*sin(4*B))/4-(a6*sin(6*B))/6+(a8*sin(8*B))/8;
end
meridian2latitude.m
function B=meridian2latitude(x,a,e)
m0=a*(1-e^2);
m2=(3*(e^2)*m0)/2;
m4=(5*(e^2)*m2)/4;
m6=(7*(e^2)*m4)/6;
m8=(9*(e^2)*m6)/8;
a0=m0+m2/2+3*m4/8+5*m6/16+35*m8/128;
a2=m2/2+m4/2+15*m6/32+7*m8/16;
a4=m4/8+3*m6/16+7*m8/32;
a6=m6/32+m8/16;
a8=m8/128;
%%纬度B的计算
B0=x./a0;%B的初始值
while 1
F=-(a2.*sin(2.*B0))./2+(a4.*sin(4.*B0))./4-(a6.*sin(6.*B0))./6+(a8.*sin(8.*B0))./8;
B=(x-F)./a0;
if abs(B0-B)<10^(-6)
break;
end
abs(B0-B);
B0=B;
end
end
rad2dms.m
function dms=rad2dms(azimuth)%弧度转度分秒
dgree_tem=azimuth*180/pi;
dgree=fix(dgree_tem);
min_tem=((dgree_tem-dgree)*60);
min=fix(min_tem);
second=((min_tem-min)*60);
dms=dgree+min/100+second/10000;
end
实现图像上像素点与实际位置的GPS对应的更多相关文章
- 机器学习进阶-图像金字塔与轮廓检测-模板匹配(单目标匹配和多目标匹配)1.cv2.matchTemplate(进行模板匹配) 2.cv2.minMaxLoc(找出矩阵最大值和最小值的位置(x,y)) 3.cv2.rectangle(在图像上画矩形)
1. cv2.matchTemplate(src, template, method) # 用于进行模板匹配 参数说明: src目标图像, template模板,method使用什么指标做模板的匹配 ...
- [图像]用Matlab在图像上画矩形框
原创文章,欢迎转载.转载请注明:转载自 祥的博客 原文链接:http://blog.csdn.net/humanking7/article/details/46819527 在毕业设计的时候写论文画图 ...
- 在YUV图像上根据背景色实现OSD反色
所谓的OSD其实就是在视频图像上叠加一些字符信息,比如时间,地点,通道号等, 在图像上叠加OSD通常有两种方式: 一种是在前端嵌入式设备上,在图像数据上叠加OSD, 这样客户端这边只需解码显示数据即可 ...
- OpenCV学习笔记(4)——图像上的算术运算
学习图像上的算术运算,加法,减法,位运算等 1.图像加法 使用cv2.add()将两幅图像进行加法运算,也可以用numpy运算,直接img+img1.两幅图像的大小和类型必须一致,或者第二个图像可以是 ...
- OpenCV之响应鼠标(四):在图像上绘制出矩形并标出起点的坐标
涉及到两方面的内容:1. 用鼠标画出矩形.2.在图像上绘制出点的坐标 用鼠标绘制矩形,涉及到鼠标的操作,opencv中有鼠标事件的介绍.需要用到两个函数:回调函数CvMouseCallback和注册回 ...
- c# PictureBox 的图像上使用鼠标画矩形框
C# 中在图像上画框,通过鼠标来实现主要有四个消息响应函数MouseDown, MouseMove, MouseUp, Paint重绘函数实现.当鼠标键按下时开始画框,鼠标键抬起时画框结束. Poin ...
- 在DirectShow的视频图像上叠加线条和文字
在DirectShow的视频图像上叠加线条和文字 最近一直在从事工业测量方面的开发工作,难免会用到各种各样的相机,其中支持DX的USB相机开发起来比较方便,由于工作需要经常要在视频图像上叠加线条和文字 ...
- LindDotNetCore~docker里图像上生成中文乱码问题
回到目录 因为docker上的大部分镜像都是基于linux系统的,所以在向图像中写中文时需要考虑中文字体问题,例如在microsoft/aspnetcore2.0这个镜像,它是基于debian系统的, ...
- [问题解决]Android7.0上PopupWindow的showAsDropDown位置问题
[问题解决]Android7.0上PopupWindow的showAsDropDown位置问题 /** * Created by diql on 2017/02/16. */ 问题说明 我的popup ...
随机推荐
- Appium 用途和特点
Appium 是一个移动 App (手机应用)自动化工具. 手机APP 自动化有什么用? 自动化完成一些重复性的任务 比如微信客服机器人 爬虫 就是通过手机自动化爬取信息. 为什么不通过网页.HTTP ...
- 网络端口及nmap扫描
端口: 计算机与外界交流的出口,在渗透测试当中常用的端口号: 21号端口FTP:文件传输协议 23号端口Telent :远程登录接口 53号端口 DNS: 域名端口 80号端口HTTP:超文本传输协议 ...
- JVM内存模型不再是秘密
前言 上篇文章我们一起了解了jvm虚拟机类的加载机制,而且是以一种纯大白话进行的一场闲聊,相信小伙伴们应该印象深刻,感兴趣的小伙伴可以重温一下上一篇文章大白话谈JVM的类加载机制. 当jvm加载了类后 ...
- Android 字符串的常用操作
目录 Substring 基本语法 IndexOf 基本语法 Split 基本语法 Substring 基本语法 str.substring(","); //从第一个,号开始截取 ...
- Django新手图文入门教程
版权所有,转载需注明来源! 本文是广受大家欢迎的<Django1.10新手图文入门教程>的2.1版本升级篇,原1.10版本传送门点击我 本文面向有一些的Python基础,但刚接触web框架 ...
- 01 How does C Programming work ? C语言如何工作?
where is C used ? C 语言的应用场景 C is widely used C语言被广泛应用于: For creating desktop applications 用于创建桌面应用程序 ...
- C1853 编译器错误:fatal error C1853: 'pjtname.pch' precompiled header file is from a previous
转载:https://www.cnblogs.com/emanlee/archive/2010/10/16/1852998.html 用VC++ 2008 编写C语言程序,编译出现错误: 预编译头文件 ...
- 6-kubernetes网络
1.service存在的意义 防止破的失联(服务发现) 定义一组pod的访问策略(提供负载均衡) 2.pod与service的关系 通过label-selector相关联 通过service实现pod ...
- CentOS7 系统安全的设置
一.禁止root远程直接登录 # 创建普通用户,并设置密码 useradd bluceli #新建账户 passwd bluceli #设置密码 # 不允许root远程直接登录 vim /etc/ss ...
- 小试牛刀-hello,world!(第一个程序)
1.打开python的IDLE,启动Python解释器(按键盘的windows键,然后输入IDLE),在提示符下>>>输入命令:print("hello,world!&qu ...