基于STM32F429+HAL库编写的定时器主从门控模式级联输出固定个数PWM脉冲的程序
硬件设备
42步进电机,步进电机驱动器,正点原子F429开发板
开发软件
keil5,Cube
综述
一般要精准的控制电机,就要控制单片机的引脚输出指定个数的PWM波,有多种可实现的方法,其中最好用的方法是用定时器级联输出固定个数PWM脉冲,虽然多用了一个定时器,但大大减少了CPU的处理资源。STM32的每个定时器可以通过另外一个定时器的某一个条件被触发而启动.这里所谓某一个条件可以是定时到时、定时器超时、比较成功等许多条件.这种通过一个定时器触发另一个定时器的工作方式称为定时器的同步,发出触发信号的定时器工作于主模式,接受触发信号而启动的定时器工作于从模式。

Cube配置定时器,主定时器为PWM输出,从定时器为门控模式
1.主定时器为TIM3,其中通道1配置为PWM输出,主模式的更新事件选为触发输入
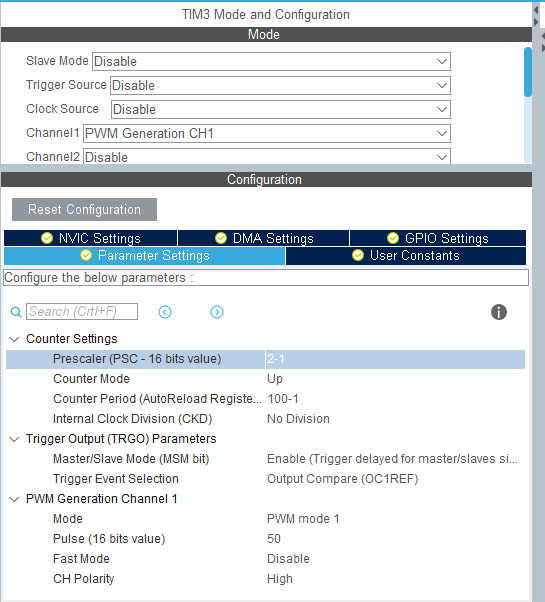
Cube的配置为参考,一切以代码为准
void MX_TIM3_Init(void)
{
TIM_ClockConfigTypeDef sClockSourceConfig;
TIM_MasterConfigTypeDef sMasterConfig = {};
TIM_OC_InitTypeDef sConfigOC = {}; htim3.Instance = TIM3; //设置主定时器为TIM3
htim3.Init.Prescaler = -; //设置PWM频率
htim3.Init.CounterMode = TIM_COUNTERMODE_UP; //设置计数模式为向上计数
htim3.Init.Period = -; //设置占空比
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; //设置为无分频
if (HAL_TIM_PWM_Init(&htim3) != HAL_OK)
{
Error_Handler();
} sMasterConfig.MasterOutputTrigger = TIM_TRGO_UPDATE; //更新事件被选为触发输入
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_ENABLE; //开启主从模式
if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK)
{
Error_Handler();
} sConfigOC.OCMode = TIM_OCMODE_PWM1; //设置PWM模式为PWM1
sConfigOC.Pulse = ; //设置PWM占空比为50%(50/100)
sConfigOC.OCPolarity = TIM_OCPOLARITY_LOW; //设置PWM空闲状态引脚拉低
if (HAL_TIM_PWM_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
} HAL_TIM_MspPostInit(&htim3); //设置PA6复用为PWM输出引脚
HAL_TIM_Base_Stop(&htim3);
}
2.从定时器为TIM4,选为门控模式——触发输入
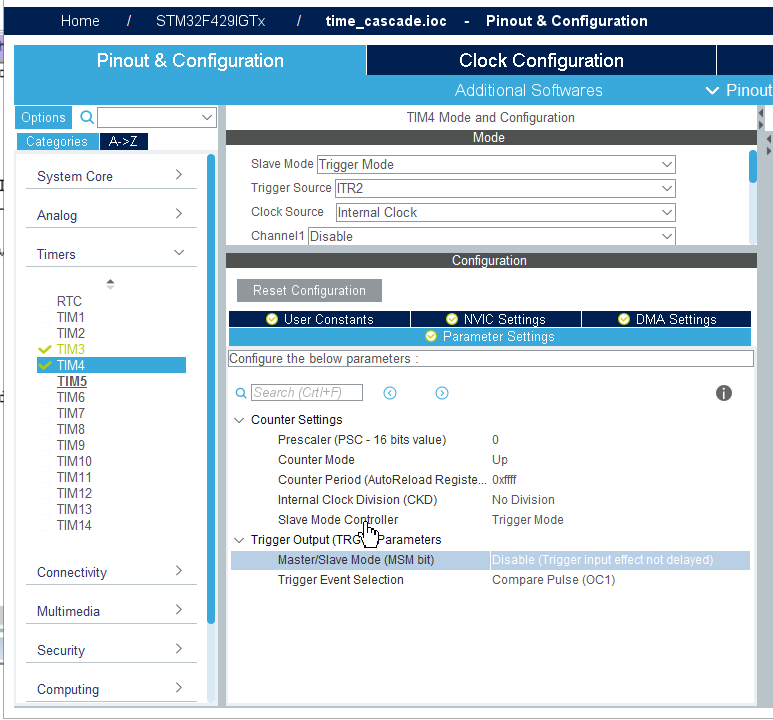
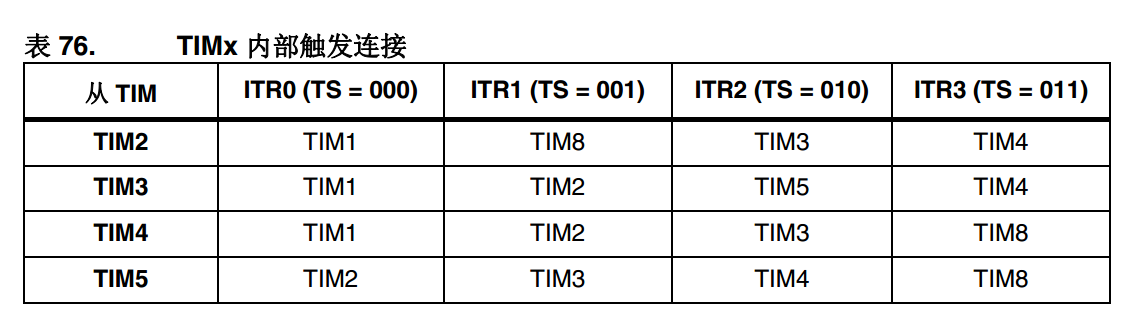
从为TIM4,主为TIM3,根据下图,所以从模式的触发时钟为ITR2
void MX_TIM4_Init(void)
{
TIM_ClockConfigTypeDef sClockSourceConfig = {};
TIM_SlaveConfigTypeDef sSlaveConfig = {}; htim4.Instance = TIM4; //设置从定时器为TIM4
htim4.Init.Prescaler =; //设置从定时器频率为0
htim4.Init.CounterMode = TIM_COUNTERMODE_UP; //设置计数模式为向上计数
htim4.Init.Period =0xffff; //这个大于0就行
htim4.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; //设置为无分频
if (HAL_TIM_Base_Init(&htim4) != HAL_OK)
{
Error_Handler();
} sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL; //设置为内部时钟触发,即为TIM3
if (HAL_TIM_ConfigClockSource(&htim4, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
} sSlaveConfig.SlaveMode = TIM_SLAVEMODE_GATED; //设置为门触发
sSlaveConfig.InputTrigger = TIM_TS_ITR2; //设置ITR2(tim3)为输入源
sSlaveConfig.TriggerPolarity = TIM_TRIGGERPOLARITY_RISING; //设置触发模式为上升沿
sSlaveConfig.TriggerPrescaler = TIM_TRIGGERPRESCALER_DIV1; //设置无预分频
sSlaveConfig.TriggerFilter = 0x0; //设置无滤波 if (HAL_TIM_SlaveConfigSynchronization(&htim4, &sSlaveConfig) != HAL_OK)
{
Error_Handler();
}
HAL_TIM_Base_Stop_IT(&htim4); }
从定时器的频率一定要设为0,不然输出的PWM会加倍
中断处理函数
HAL里的中断处理函数要选HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim),当TIM4->CNT的值达到TIM4->ARR的值时触发中断,关闭主从定时器,清零中断标志位SR
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{ FLAG1_OK = ; if(htim==(&htim4))
{ //****************************************************//
if(__HAL_TIM_GET_FLAG(&htim4, TIM_FLAG_CC1) != RESET) //判断是否触发中断
{
__HAL_TIM_CLEAR_FLAG(&htim4, TIM_FLAG_CC1); //清除中断标志位 HAL_TIM_PWM_Stop_IT(&htim3, TIM_CHANNEL_1); //关闭主定时器的PWM输出 HAL_TIM_Base_Stop_IT(&htim4); //关闭从定时器的计数 //****************************************************// } delay_ms();
FLAG1_OK = ;
} }
脉冲输出主函数
中断函数关闭的,于此要重新开启,有始有终
while(1)
{ if(FLAG1_OK == ) //标志判断
{ she10 __HAL_TIM_SET_AUTORELOAD(&htim4,10-); //ARR装载要输出的PWM脉冲数 HAL_TIM_Base_Start_IT(&htim4); //从定时器计数开启 HAL_TIM_PWM_Start_IT(&htim3, TIM_CHANNEL_1); //主定时器PWM脉冲输出 } }
分析仪实测波形

很漂亮整洁的10个PWM波,在1MHz以下挺准的,但上去了就多了一两个波,还需要细调。
这个是单定时器的单通道的程序,已经写好单定时器多通道的了,有时间再发。
有不足之处还请各位不吝赐教。
基于STM32F429+HAL库编写的定时器主从门控模式级联输出固定个数PWM脉冲的程序的更多相关文章
- 基于STM32F429和Cube的主从定时器多通道输出固定个数的PWM波形
主从定时器的原理已在上篇博文: 基于STM32F429+HAL库编写的定时器主从门控模式级联输出固定个数PWM脉冲的程序 讲解了,这篇重点就讲如何实现多通道的PWM级联输出. 1.软件环境 Keil5 ...
- 定时器同步+触发三ADC采样+输出6路PWM波
为了熟悉定时器定时器和ADC 用STM32F407DIS做了一个简单的工程: 通过高级定时器TIM1溢出更新时间作为触发输出信号(TRGO),触发TIM8开始计数: 同时TIM1的通道1.2.3以及分 ...
- STM32 HAL库学习系列---定时器TIM 输入捕获功能
基本方法 1.设置TIM2 CH1为输入捕获功能: 2.设置上升沿捕获: 3.使能TIM2 CH1捕获功能: 4.捕获到上升沿后,存入capture_buf[0],改为捕获下降沿: 5.捕获到下降沿后 ...
- 新建基于STM32F103ZET6的工程-HAL库版本
1.STM32F103ZET6简介 STM32F103ZET6的FLASH容量为512K,64K的SRAM.按照STM32芯片的容量产品划分,STM32F103ZET6属于大容量的芯片. 2.下载HA ...
- STM32 之 HAL库(固件库) _
1 STM32的三种开发方式 通常新手在入门STM32的时候,首先都要先选择一种要用的开发方式,不同的开发方式会导致你编程的架构是完全不一样的.一般大多数都会选用标准库和HAL库,而极少部分人会通过直 ...
- STM32 之 HAL库(固件库)
1 STM32的三种开发方式 通常新手在入门STM32的时候,首先都要先选择一种要用的开发方式,不同的开发方式会导致你编程的架构是完全不一样的.一般大多数都会选用标准库和HAL库,而极少部分人会通过直 ...
- STM32,下载HAL库写的代码后J-Link识别不到芯片,必须要按住复位才能下载?
问题描述:最近在学STM32的HAL库,据说可以统一STM32江湖,前途无量.最近一段时间参照STM32CubeMX和原子的资料自己学着建了两个HAL库的工程模板,F4的还好说,F1的出现了一个玄学问 ...
- stm32定时器主从模式
TIM2作master:TIM3,TIM4作slave 定时器2事件更新被用作触发输出TRGO 从定时器TIM3,TIM4工作在从模式:门控模式 触发选择设为:ITR1,这样TIM2的TRGO就连到了 ...
- 基于STM32F429和HAL库的CAN收发例程
1.CAN协议介绍 CAN 是 Controller Area Network 的缩写(以下称为 CAN),是 ISO 国际标准化的串行通信协议.在当前的汽车产业中,出于对安全性.舒适性.方便性.低公 ...
随机推荐
- 批量ping测试的脚本
#脚本开始 #!/bin/bash HOSTLIST=`cat /usr/local/ipaddrs.txt` for IP in $HOSTLIST do ping -c 3 -i 0.2 -W 3 ...
- Sql Server查看死锁及堵塞脚本
--每秒死锁数量 SELECT * FROM sys.dm_os_performance_counters WHERE counter_name LIKE 'Number of Deadlocksc% ...
- 【Centos】Postgresql连接测试(Perl和Ruby)
Centos安装了PostgreSQL之后,将考虑如何让Perl与Ruby连接它. Perl连接方式 1,安装Perl的数据库连接包 perl-DBD-Pg perl-DBI yum install ...
- Sql case when 示例
SELECT 单元编号,年,月, 项目编号='11111', sum(case when 项目编号= 'ZB010201' then [当月额] else 0 end ) 医疗收 ...
- 协程gevent
协程,利用线程在等待其他资源期间去执行其他的函数. gevent里面封装了greenlet,greenlet里面封装了yield. from gevent import monkey import g ...
- 解决spring-boot配置文件使用加密方式保存敏感数据启动报错No decryption for FailsafeTextEncryptor. Did you configure the keystore correctly
spring-boot配置文件使用加密方式保存敏感数据 application.yml spring: datasource: username: dbuser password: '{cipher} ...
- 搭建 Jest+ Enzyme 测试环境
1.为什么要使用单元测试工具? 因为代码之间的相互调用关系,又希望测试过程单元相互独立,又能正常运行,这就需要我们对被测函数的依赖函数和环境进行mock,在测试数据输入.测试执行和测试结果检查方面存在 ...
- JS基础——原型和原型链
1.相关知识点 (1)构造函数 (函数名首字母大写表示构造函数) function Foo(name,age){ this.name = name; this.age = age; this.cla ...
- UnityShaderVariant的一些探究心得
最近遇到了一个问题,角色在Unity编辑器里运行渲染结果都是好的,打包到IOS上却发现,角色身上渲染的很黑.花了些时间查了查,又试了试,把这方面算是初步弄清楚了. 先说出现问题的原因,由于我们把sha ...
- 自学大数据(hadoop)小插曲__虚拟机工具
安装VMware Tools VMware 版本:10.0.1 ubuntu(linux) 版本:16.04 LTS 序言:本来第一天可以访问共享文件夹,第二天重新安装了四个ubuntu,可惜确无法访 ...