Halcon编程-基于纹理的mara检测
表面瑕疵检测是机器视觉领域非常重要的一个应用。机器视觉是集光学、机电和计算机三个领域的一门不算新的技术。但目前表面瑕疵检测在学界主要是计算机专业或者控制专业瞄准图像处理方向在做,而视觉光学系统这一块主要是光学工程专业在做。很少有研究者把这三块都结合的很好,而国内做这机器视觉(注意是机器视觉 不是计算机视觉)基本上都是小公司。
软件这一块就不说了,国内的整体软件环境不好。据我所知,日本、德国和美国在机器视觉方面有很多相对成熟的软件。中国农业大学的陈兵旗教授在留日期间弄过很多机器视觉方面的农业机器人,同时他也写过一本书介绍视觉图像处理,后面还附录了他们自己主推的软件。德国的软件就是下面要介绍的halcon。提到halcon就有必要和开源的opencv进行对比,opencv在图像处理方面也是小有名气,但是其成型的图像模块函数并不多,而且由于是开源,并没有专门对各种图像处理领域方面的检测需求进行扩展,还是那句话,毕竟是开源。
halcon是商业软件,国内主要是大恒公司在代理,其在图像处理方面,特别是检测测量方面有很多优势。下面我以一个例子在介绍halcon图像算法开发过程。
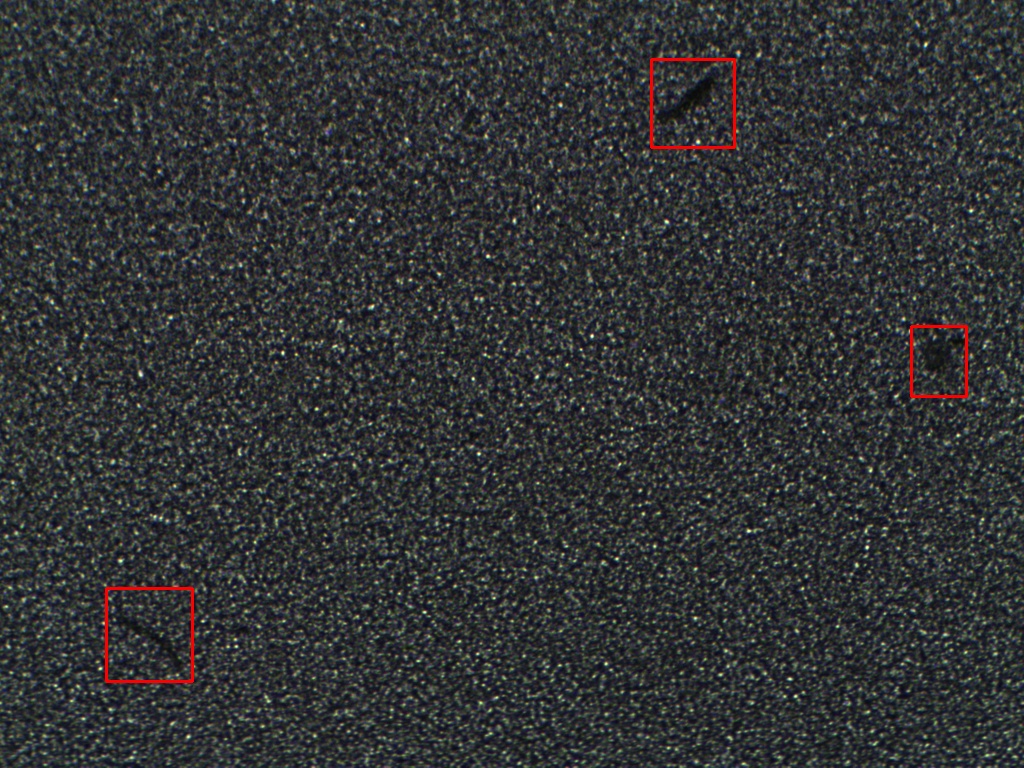
启动软件,ctrl+E弹出例程,选择表面检测中的detect_mura_defects_texture 。这个是液晶面板上的mura 损伤 。附录上张存在损伤的图像 
在杂乱的纹理上出现的黑色区域就是损伤。如何检测呢?
代码如下:
* this example shows how to detect mura defects
* in highly textured images
*
dev_close_window ()
dev_update_off ()
Path := 'lcd/mura_defects_texture_'
read_image (Image, Path+'01')
get_image_size (Image, Width, Height)
dev_open_window (0, 0, 640, 480, 'black', WindowHandle)
set_display_font (WindowHandle, 14, 'courier', 'true', 'false')
dev_set_draw ('margin')
dev_set_line_width (3)
dev_set_color ('red')
for f := 1 to 2 by 1
read_image (Image, Path+f$'.2i')
decompose3 (Image, R, G, B)
* defects are characterized by dark patches. Hence, by substracting the
* estimated background illumination from the original image the
* defects become more apparent
estimate_background_illumination (B, ImageFFT1)
sub_image (B, ImageFFT1, ImageSub, 2, 100)
* median filter smooths out the fine texture, simplifying the following
* segmentation and final detection of defects
median_image (ImageSub, ImageMedian, 'circle', 9, 'mirrored')
watersheds_threshold (ImageMedian, Basins, 20)
* dark patches corresponding to defects have a very low energy
cooc_feature_image (Basins, ImageMedian, 6, 0, Energy, Correlation, Homogeneity, Contrast)
tuple_find (sgn(Energy-0.05), -1, Indices)
select_obj (Basins, Defects, Indices+1)
*
dev_display (Image)
dev_display (Defects)
count_obj (Defects, NDefects)
disp_message (WindowHandle, NDefects+' \'mura\' defects detected', 'window', -1, -1, 'red', 'true')
if (f < 2)
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
endif
endfor
1对彩色图像进行R G B分解,选取B作为后续图像。这个原因是通过实验处理的,在B图像下黑色斑和背景差异最大吧。
2 生成背景模板,将图像傅里叶变换到频域中,通过高斯滤波,然后傅里叶反变换回来,得到的图像就是背景模板
3 背景差分。采用以下函数,增强两幅图像的差异
sub_image ( ImageMinuend, ImageSubtrahend : ImageSub : Mult, Add : )
ImageSub=(ImageMinuend-ImageSubtrahend)*Mult+Add
4 分水岭算法分割,在分割之前采用中值滤波来抑制小斑点或细线。分水岭后,图像分割为多个轮廓(region)。
5 计算多个轮廓region的灰度信息,包括能量。相关度、同一度、对比度,通过灰度共生矩阵。 前面的两个参数是灰度级和方向,灰度级是2^,方向即灰度共生矩阵方向。
6 根据能量信息对多个region进行筛选,筛选后的region就是检测结果。
Halcon::tuple_find ((Energy-0.05).Sgn(), -1, &Indices);
image_opencv_test=m_ip->HImageToIplImage(m_hoImage);
int number=Indices.Num();
for (int i=0;i<number;i++)
{
Halcon::HTuple new_Indices;
new_Indices[0]=Indices[i].I()+1;
Halcon::select_obj (Basins, &Defects, new_Indices);
Hlong x1,x2,y1,y2;
Halcon::smallest_rectangle1(Defects,&y1,&x1,&y2,&x2);
cvRectangle(image_opencv_test,cvPoint(x1,y1),cvPoint(x2,y2),cvScalar(0,0,255),2,8,0);
}
判断能量是否大于0.05,通过sgn函数将大于0.05的置1,小于的置-1。通过find
在(Energy-0.05).Sgn()中寻找-1出现的位置,注意这个位置是从0开始的。貌似这个是经过人为排序的,所以indices 中就是前三个 0 1 2
select_obj (Basins, &Defects, new_Indices);是从Basins提取序号为new_Indices的region 。为什么重新定义一个HTuple 因为HTuple实际上是个数组。find后得到的就是一个indices 数组,里面存在三个数。
select_obj 的参数必须是HTuple,也就是数组,所以只能重新定义,而且序号从1开始,因此要加1,只能获取数组中的值加1,
获取的代码为new_Indices[0]=Indices[i].I()+1; 也就是说数组中的值可以直接访问,然后转化为需要的类型。
这是我弄的比较笨的方法,直接通过halcon转化c++代码,只有一句。我觉得还是单个取出来比较靠谱。 贴一个检测结果吧:
Halcon编程-基于纹理的mara检测的更多相关文章
- Halcon编程-基于形状特征的模板匹配
halcon软件最高效的一个方面在于模板匹配,号称可以快速进行柔性模板匹配,能够非常方便的用于缺陷检测.目标定位.下面以一个简单的例子说明基于形状特征的模板匹配. 为了在右图中,定位图中的三 ...
- 基于纹理边缘抑制的轮廓和边界检测(Contour and Boundary Detection)
基于纹理边缘抑制的轮廓和边界检测(Contour and Boundary Detection) kezunhai@gmail.com http://blog.csdn.net/kezunhai 一幅 ...
- 10分钟内基于gpu的目标检测
10分钟内基于gpu的目标检测 Object Detection on GPUs in 10 Minutes 目标检测仍然是自动驾驶和智能视频分析等应用的主要驱动力.目标检测应用程序需要使用大量数据集 ...
- 基于纹理的图片检索及demo(未启动)
基于纹理的图片检索及demo(未启动)
- 【AdaBoost算法】基于OpenCV实现人脸检测Demo
一.关于检测算法 分类器训练: 通过正样本与负样本训练可得到分类器,opencv有编译好的训练Demo,按要求训练即可生成,这里我们直接使用其已经训练好的分类器检测: 检测过程: 检测过程很简单,可以 ...
- C#脱离Halcon编程开发环境使用方法
在没有安装Halcon开发程序(HDevelop (SSE2))的电脑上面编程,使C#脱离Halcon编程开发环境使用方法,除了按照Halcon与编程环境必须要做的设置步骤外,还需要做如下两个工作: ...
- Unity编辑器:基于NGUI的引用检测工具
这里共享一个基于NGUI的引用检测工具.工具包括几个部分:Atlas/Sprite的引用查找:字库引用查找:UITexture引用查找:Component查找: 代码就不多介绍了,文章底部提供源码下载 ...
- 使用Dlib来运行基于CNN的人脸检测
检测结果如下 这个示例程序需要使用较大的内存,请保证内存足够.本程序运行速度比较慢,远不及OpenCV中的人脸检测. 注释中提到的几个文件下载地址如下 http://dlib.net/face_det ...
- 转-------基于R-CNN的物体检测
基于R-CNN的物体检测 原文地址:http://blog.csdn.net/hjimce/article/details/50187029 作者:hjimce 一.相关理论 本篇博文主要讲解2014 ...
随机推荐
- Oracle EBS进化史
https://blogs.oracle.com/ptian/entry/oracle_ebs%E8%BF%9B%E5%8C%96%E5%8F%B2 通过图表总结了下Oracle EBS的进化历史,回 ...
- asp.net导出dbf报错“未在本地计算机上注册“VFPOLEDB”提供程序。”
导出dbf文件报错,提示“未在本地计算机上注册“VFPOLEDB”提供程序.” 可以尝试一下方法: 方法一:下载VFPOLEDBSetup.msi 安装 如果方法一不行:继续方法二:下载vfp9.0 ...
- 分享一个漂亮的ASP.NET MVC界面框架
本文分享一个插件化的界面框架,该框架提供了用户.角色.权限管理功能,也提供了插件的管理和插件中心.下图是该界面框架的样式(全部源码和原理介绍下一篇分享,推荐越多,源码放的越早,呵呵). 要使用该界面框 ...
- 你眼中的async/await是什么样的?
又到了周末的code review环节,这次code review发现了一个对async/await的理解问题.让我们直奔主题: var foodsSearch = new FoodSearchSer ...
- 为自己搭建一个鹊桥 -- Native Page与Web View之间的JSBridge实现方式
说起JSBridge,大家最熟悉的应该就是微信的WeixinJSBridge,通过它各个公众页面可以调用后台方法和微信进行交互,为用户提供相关功能.我们就来说说UWP下怎么样实现我们自己的JSBrid ...
- Angular Module声明和获取重载
module是angular中重要的模块组织方式,它提供了将一组内聚的业务组件(controller.service.filter.directive…)封装在一起的能力.这样做可以将代码按照业务领域 ...
- Ng Http Request/response格式转换
angular作为Single Page Application推荐的交互方式当然是基于json的ajax调用.但今天要说的是当你不幸工作在一个遗留或者不可控制的服务上,而这服务是基于非json提交方 ...
- 据说每个大牛、小牛都应该有自己的库——JavaScript原生对象拓展
在据说每个大牛.小牛都应该有自己的库——框架篇中我扬言要做个小牛,没想到一天没更新,小伙儿伴们就戏谑的问我,油哥是不是要太监了?其实事情是这个样子的,这不是太监的节奏,一是,关于写个自己的库的想法由来 ...
- 在 Win10 命令行使用 Consolas + 微软雅黑
这个过程挺神奇的,步骤参考了下面两篇文章,但是过程很曲折: 1. 使用Monaco和微软雅黑字体美化cmd和PowerShell 2. [zz]Windows的cmd.exe使用consolas加中文 ...
- Linux C/C++的编译
以前在Linux上面编译过C,但是没有编译过C++,今天用到了,就稍微学习了一下. 简单的介绍 linux 中最重要的编译工具是 GCC.GCC 是 GNU 的 C 和 C++ 编译器.实际上,GCC ...