空间点绕轴旋转公式&程序(C++)
关键词:空间旋转、旋转轴
用途:相机位姿估计、无人机位姿估计、3D游戏、3D建模
文章类型:概念、公式总结(本文不带推导过程,若想了解公式是如何推出来的请搜索文献),C++函数展示
@Author:VShawn(singlex@foxmail.com)
@Date:2016-11-04
@Lab: CvLab202@CSU
写在前面的一些概念
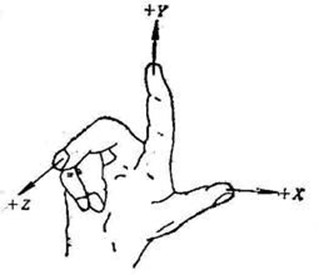
右手系
关于这个概念,搞3D的人应该都懂,而像我这样做图像处理的可能就对这个知道的比较少了。右手系这个概念其实很简单,看图就懂了。在坐标系中,右手摆成下图的样子,当拇指指向X轴食指指向Y轴时,中指指向了Z轴,满足这个条件的坐标系就是右手系。本文所有概念都在右手系下进行讨论。
右手系
旋转90°到底是怎么转
当我要让一个点,绕Y轴转动了90°,并且用程序计算出了旋转结果,为了验证这个点是否旋转正确,我们需要知道这个90°是怎么转的。在网上搜索了挺多文章,都没有对这个东西进行明确的定义,那么这里给出我的总结。从原点(0,0,0)往Y轴方向看,此时视野中的坐标系降维到二维坐标系XOZ,那么让点绕O点顺时针转90°,即为正确的旋转结果。
[图待补]
问题一:XYZ空间内某点绕X、Y、Z轴旋转一次
这个问题比较简单,网上已经有较多总结:
设旋转前坐标为 ,旋转后坐标为
,旋转后坐标为 。
。
1.绕Z轴旋转γ角
首先给出向量表示:
\[\left[ x',y',z',1 \right]=\left[ x,y,z,1 \right]\left[ \begin{matrix} \cos \gamma & \sin \gamma & 0 & 0 \\ -\sin \gamma & \cos \gamma & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \\\end{matrix} \right]\]
然后是公式表示:
\[\begin{align} & x'=cos\gamma \cdot x-sin\gamma \cdot y \\ & y'=\sin \gamma \cdot x+co\gamma \cdot y \\ & z'=z \\ \end{align}\]
最后是代码表示
//将空间点绕Z轴旋转
//输入参数 x y为空间点原始x y坐标
//thetaz为空间点绕Z轴旋转多少度,角度制范围在-180到180
//outx outy为旋转后的结果坐标
void codeRotateByZ(double x, double y, double thetaz, double& outx, double& outy)
{
double x1 = x;//将变量拷贝一次,保证&x == &outx这种情况下也能计算正确
double y1 = y;
double rz = thetaz * CV_PI / 180;
outx = cos(rz) * x1 - sin(rz) * y1;
outy = sin(rz) * x1 + cos(rz) * y1; }
2.绕Y轴旋转β角
首先给出向量表示:
\[\left[ x',y',z',1 \right]=\left[ x,y,z,1 \right]\left[ \begin{matrix} \cos \beta & 0 & -\sin \beta & 0 \\ 0 & 1 & 0 & 0 \\ \sin \beta & 0 & \cos \beta & 0 \\ 0 & 0 & 0 & 1 \\\end{matrix} \right]\]
然后是公式表示:
\[\begin{align} & x'=cos\beta \cdot x+sin\beta \cdot z \\ & y'=y \\ & z'=-\sin \beta \cdot x+\cos \beta \cdot z \\ \end{align}\]
最后是代码表示
//将空间点绕Y轴旋转
//输入参数 x z为空间点原始x z坐标
//thetay为空间点绕Y轴旋转多少度,角度制范围在-180到180
//outx outz为旋转后的结果坐标
void codeRotateByY(double x, double z, double thetay, double& outx, double& outz)
{
double x1 = x;
double z1 = z;
double ry = thetay * CV_PI / 180;
outx = cos(ry) * x1 + sin(ry) * z1;
outz = cos(ry) * z1 - sin(ry) * x1;
}
3.绕X轴旋转α角
首先给出向量表示:
\[\left[ x',y',z',1 \right]=\left[ x,y,z,1 \right]\left[ \begin{matrix} 1 & 0 & 0 & 0 \\ 0 & \cos \alpha & \sin \alpha & 0 \\ 0 & -\sin \alpha & \cos \alpha & 0 \\ 0 & 0 & 0 & 1 \\\end{matrix} \right]\]
然后是公式表示:
\[\begin{align} & x'=x \\ & y'=\cos \alpha \cdot y-\sin \alpha \cdot z \\ & z'=\sin \alpha \cdot y+\sin \alpha \cdot z \\ \end{align}\]
最后是代码表示
//将空间点绕X轴旋转
//输入参数 y z为空间点原始y z坐标
//thetax为空间点绕X轴旋转多少度,角度制范围在-180到180
//outy outz为旋转后的结果坐标
void codeRotateByX(double y, double z, double thetax, double& outy, double& outz)
{
double y1 = y;//将变量拷贝一次,保证&y == &y这种情况下也能计算正确
double z1 = z;
double rx = thetax * CV_PI / 180;
outy = cos(rx) * y1 - sin(rx) * z1;
outz = cos(rx) * z1 + sin(rx) * y1;
}
问题二:空间点绕任意轴旋转
首先,需要定义"任意轴"的单位向量,例如X轴可以用向量 来表示。
来表示。
那么假设旋转轴的单位向量为 ,旋转前坐标为
,旋转前坐标为 ,旋转后坐标为
,旋转后坐标为 ,旋转角为
,旋转角为 ,于是有:
,于是有:
\[\begin{align} & x'=(vx\cdot vx\cdot (1-cos\theta )+cos\theta )\cdot x+(vx\cdot vy\cdot (1-cos\theta )-vz\cdot sin\theta )\cdot y+(vx\cdot vz\cdot (1-cos\theta )+vy\cdot sin\theta )\cdot z \\ & y'=(vx\cdot vy\cdot (1-cos\theta )+vz\cdot sin\theta )\cdot x+(vy\cdot vy\cdot (1-cos\theta )+cos\theta )\cdot y+(vy\cdot vz\cdot (1-cos\theta )-vx\cdot sin\theta )\cdot z \\ & z'=(vx\cdot vz\cdot (1-\cos \theta )-vy\cdot \sin \theta )\cdot x+(vy\cdot vz\cdot (1-\cos \theta )+vx\cdot \sin \theta )\cdot y+(vz\cdot vz\cdot (1-\cos \theta )+\cos \theta )\cdot z \\ \end{align}\]
计算时照着公式代入即可。
最后给出代码实现:
//定义返回结构体
struct Point3f
{
Point3f(double _x, double _y, double _z)
{
x = _x;
y = _y;
z = _z;
}
double x;
double y;
double z;
}; //点绕任意向量旋转,右手系
//输入参数old_x,old_y,old_z为旋转前空间点的坐标
//vx,vy,vz为旋转轴向量
//theta为旋转角度角度制,范围在-180到180
//返回值为旋转后坐标点
Point3f RotateByVector(double old_x, double old_y, double old_z, double vx, double vy, double vz, double theta)
{
double r = theta * CV_PI / 180;
double c = cos(r);
double s = sin(r);
double new_x = (vx*vx*(1 - c) + c) * old_x + (vx*vy*(1 - c) - vz*s) * old_y + (vx*vz*(1 - c) + vy*s) * old_z;
double new_y = (vy*vx*(1 - c) + vz*s) * old_x + (vy*vy*(1 - c) + c) * old_y + (vy*vz*(1 - c) - vx*s) * old_z;
double new_z = (vx*vz*(1 - c) - vy*s) * old_x + (vy*vz*(1 - c) + vx*s) * old_y + (vz*vz*(1 - c) + c) * old_z;
return Point3f(new_x, new_y, new_z);
}
问题三:空间点绕xyz轴连续旋转
前面的问题比较基础,到这个问题就需要一点空间想象力了。
首先我假设一个点绕x、y、z轴旋转90°,最终它会落在哪里?这个答案不是唯一的,因为旋转的顺序将会影响到最终的结果。
以点(1,2,3)为例
A 我让它首先绕x轴转90°,再绕y轴转90°,再绕z轴转90°。
double x = 1, y = 2, z = 3;
codeRotateByX(y, z, 90, y, z);
codeRotateByY(x, z, -90, x, z);
codeRotateByZ(x, y, -90, x, y);
cout << endl << " (1,2,3) -> (" << x << ',' << y << ',' << z << ")" << endl << endl;
旋转结果是:
B 这一次我让它首先绕z轴转90°,再绕y轴转90°,最后绕z轴转90°。
double x = 1, y = 2, z = 3;
codeRotateByZ(x, y, -90, x, y);
codeRotateByY(x, z, -90, x, z);
codeRotateByX(y, z, 90, y, z);
cout << endl << " (1,2,3) -> (" << x << ',' << y << ',' << z << ")" << endl << endl;
这次的结果是:
显然,不同的旋转顺序导致了结果的不同,因此在处理空间内绕轴旋转的问题时,我们需要严格定义每次旋转的顺序,否则会导致错误的答案。
空间点绕轴旋转公式&程序(C++)的更多相关文章
- threejs绕轴转,粒子系统,控制器操作等(二)
前言:threejs系列的第二篇文章,也是一边学习一边总结: 1,一个物体绕着另一个物体转动 上一篇文中主要是物体自转,为了描述一个一个物体绕另一个物体转,这里我描述了一个月球绕地球公转,并且自转的场 ...
- Canvas实现文字粒子化,并且绕轴旋转(初号机)
写下来发现,程序在细节上处理的很差,比如旋转的时候,在终点处有明显的撞墙感觉,以及小部分粒子存在精度差异,导致撞击后不与整体平衡. 注释全在代码中了,就不多说了,另外感觉写的旋转的规则有点怪,后续再调 ...
- Canvas实现文字粒子化,并且绕轴旋转(完善)
1. 之前有放过一个初始版本,但是因为在旋转的时候,有比较大的瑕疵,造成每个点运动到端点后,出现类似撞击的感觉. 2. 所以本文对旋转作了些调整,运用类似水平方向的圆周运动 a. HTML代码,定义c ...
- 子坐标系C在父坐标系W中的旋转问题
关键词:空间旋转.旋转轴.刚体旋转 用途:相机位姿估计.无人机位姿估计 文章类型:概念.公式总结(本文不带推倒过程,若想了解公式是如何推出来的请自习搜索文献),C++函数展示 @Author:VSha ...
- C++小项目:directx11图形程序(七):modelclass
模型类是世界空间中的表示物体的类,那么他的所做的事就是加载模型,移动模型,渲染模型 modelclass.h #pragma once #include <d3d11.h> #includ ...
- 微信小程序--图片相关问题合辑
图片上传相关文章 微信小程序多张图片上传功能 微信小程序开发(二)图片上传 微信小程序上传一或多张图片 微信小程序实现选择图片九宫格带预览 ETL:微信小程序之图片上传 微信小程序wx.preview ...
- 基于西门子S7-1500的大型焊接机全套程序,使用博图V14打开(带全部注释)
程序说明:本套程序是在从事自动化行业时候的做的项目的程序,经过在设备上运行测试,其中包含20多个轴的伺服控制以及模拟量,数字量IO的控制,包括扫描枪的读取,属于大型程序,总步数有好几万步. 本程序注释 ...
- 相机位姿估计1_1:OpenCV:solvePnP二次封装与性能测试
关键词:OpenCV::solvePnP 文章类型:方法封装.测试 @Author:VShawn(singlex@foxmail.com) @Date:2016-11-27 @Lab: CvLab20 ...
- 【Ray Tracing The Next Week 超详解】 光线追踪2-7 任意长方体 && 场景案例
上一篇比较简单,很久才发是因为做了一些好玩的场景,后来发现这一章是专门写场景例子的,所以就安排到了这一篇 Preface 这一篇要介绍的内容有: 1. 自己做的光照例子 2. Cornell box画 ...
随机推荐
- CSS补充之--页面布局、js补充,dom补充
CSS补充之--页面布局 主站一:(下面是一个大致的模板) <div class="pg-header"> <div style="width: 120 ...
- Wampserver 2.5 多站点配置方法
写在开头:本文适用于wampserver2.5版本,和wamp的老版本配置有语法上的区别,笔者正是因为被老版本的配置办法给整迷糊了所以才总结了一篇针对2.5版本的配置方法,如果您还停留在1.x或着已经 ...
- Hadoop学习笔记: 安装配置Hive
1. 在官网http://hive.apache.org/下载所需要版本的Hive,以下我们就以hive 2.1.0版为例. 2. 将下载好的压缩包放到指定文件夹解压,tar -zxvf apache ...
- could not deduce template argument for 'const std::_Tree<_Traits> &' from 'const std::string'
VS2008, 写一个简单的demo的时候出现了这个: 1>------ Build started: Project: GetExportTable, Configuration: Relea ...
- 【git常见问题】fatal: Not a valid object name: 'master'.
创建本地分支:git branch dev 报错:fatal: Not a valid object name: 'master'. 原因: 问题描述-一个非法的master,原因:本地还没有创建ma ...
- 2.6 C#的标识符命名规则
C#标识符的命名规则 程序中的变量名.常量名.类名.方法名,都叫做标识符.C#有一套标识符的命名规则,如果命名时不遵守规则,就会出错.这套规则简单说有下面三条: ①标识符只能由英文字母.数字和下划线组 ...
- 4. 什么是AJAX
术语Ajax用来描述一组技术,它使浏览器可以为用户提供更为自然的浏览体验.在Ajax之前,Web站点强制用户进入提交/等待/重新显示范例,用户的动作总是与服务器的“思考时间”同步.Ajax提供与服务器 ...
- [nodejs] Error: unable to verify the first certificate
Error: unable to verify the first certificate Solution npm config set registry http://registry.npmjs ...
- AppCan JSSDK模块扩展
1. 从源码开始: 我们先看源码的8188行到9525行: window.appcan && appcan.define('window',function($,export ...
- Makefile使用库
这篇文章演示了Makefile使用mysqlpp库和lua库的写法. test.cpp: #include <iostream> #include <stdint.h> #in ...