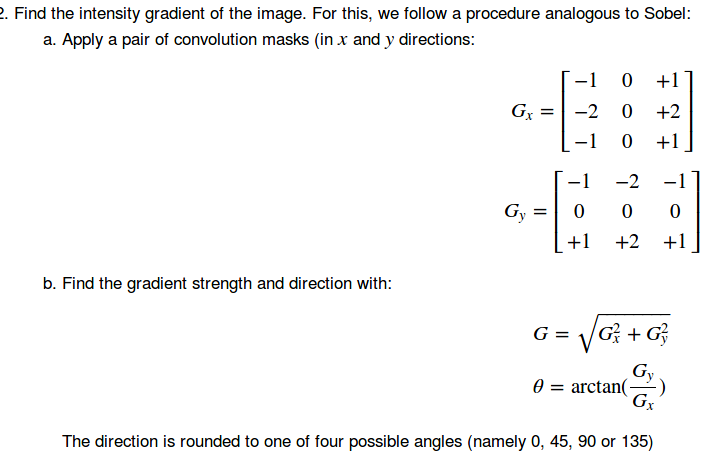
opencv目标检测之canny算法
canny
canny的目标有3个
- 低错误率 检测出的边缘都是真正的边缘
- 定位良好 边缘上的像素点与真正的边缘上的像素点距离应该最小
- 最小响应 边缘只能标识一次,噪声不应该标注为边缘
canny分几步
- 滤掉噪声 比如高斯滤波
- 计算梯度 比如用索贝尔算子算出梯度
- 非极大值抑制
上一步算出来的边缘可能比较粗糙,假设边缘是一条很细的线的话,上面处理完的结果你可以理解为得到一条比较粗的线条,所谓非极大值抑制,就是要在局部像素点中找到变换最剧烈的一个点,这样就得到了更细的边缘. - 双阈值检测和连接边缘
前面2步我们应该很熟悉了,不熟悉的参考https://www.cnblogs.com/sdu20112013/p/11608469.html 和 https://www.cnblogs.com/sdu20112013/p/11600436.html
非极大值抑制
在求解梯度这一步,我们可以得到梯度的模长和方向
这一步为我们下面做nms(非极大值抑制)打下了基础,索贝尔算子处理后的图像得到的边缘可能是很粗糙的,反映到图像上也就是边缘比较宽,我们采用nms把非极大值的点的灰度都置为0,这样就可以滤掉很多非边缘的像素点.
如下图所示,C表示为当前非极大值抑制的点,g1-4为它的8连通邻域点,图中蓝色线段表示上一步计算得到的角度图像C点的值,即梯度方向,第一步先判断C灰度值在8值邻域内是否最大,如是则继续检查图中梯度方向交点dTmp1,dTmp2值是否大于C,如C点大于dTmp1,dTmp2点的灰度值,则认定C点为极大值点,置为1,因此最后生成的图像应为一副二值图像,边缘理想状态下都为单像素边缘.
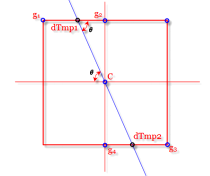
这一步里有一点需要注意的就是dTmp1,dTmp2,这两个像素点是不存在的,是通过双线性插值法算出来的. 在John Canny提出的Canny算子的论文中,非最大值抑制就只是在0、90、45、135四个梯度方向上进行的,每个像素点梯度方向按照相近程度用这四个方向来代替.实际检测过程里,为了更准确地过滤出属于边缘的像素点,会做双线性插值得到dTmp1,dTmp2.再去做前面所说的nms过程去判断一个像素点是否属于边缘.
推荐2篇讲的比较好的:https://blog.csdn.net/kezunhai/article/details/11620357 https://www.cnblogs.com/techyan1990/p/7291771.html
关于如何得到梯度方向的像素点,如下图所示

这样的话就达到了将"粗大的边缘"过滤地更加细腻.
这一步之后,得到的边缘还包含很多由噪声及其他原因造成的假边缘.
双阈值检测和边缘连接
经过nms以后,已经很接近真实边缘了.但还是有一些由于噪声或者别的一些原因造成的假的边缘.我们通过2个阈值来作进一步的过滤.
Hysteresis: The final step. Canny does use two thresholds (upper and lower): - If a pixel gradient is higher than the upper threshold, the pixel is accepted as an edge .If a pixel gradient value is below the lower threshold, then it is rejected.If the pixel gradient is between the two thresholds, then it will be accepted only if it is connected to a pixel that is above the upper threshold.
Canny recommended a upper:lower ratio between 2:1 and 3:1.
- 对于梯度大于高阈值的点,认为是真的边缘上的像素点.
- 对于梯度小于低阈值的点,认为是假的边缘像素点,是噪声造成的,去掉这些点.
- 对于梯度介于高低阈值之间的点,如果它周围的邻域像素点有"真边缘点"(也就是梯度大于高阈值的点),则认为这点也是"真边缘点".
推荐的高低阈值比在2:1到3:1之间
实际工程里,这两个参数要针对你自己的图像数据去调整,太低有可能造成假边缘太多,太高有可能造成想要保留的边缘也被滤掉了.
canny api
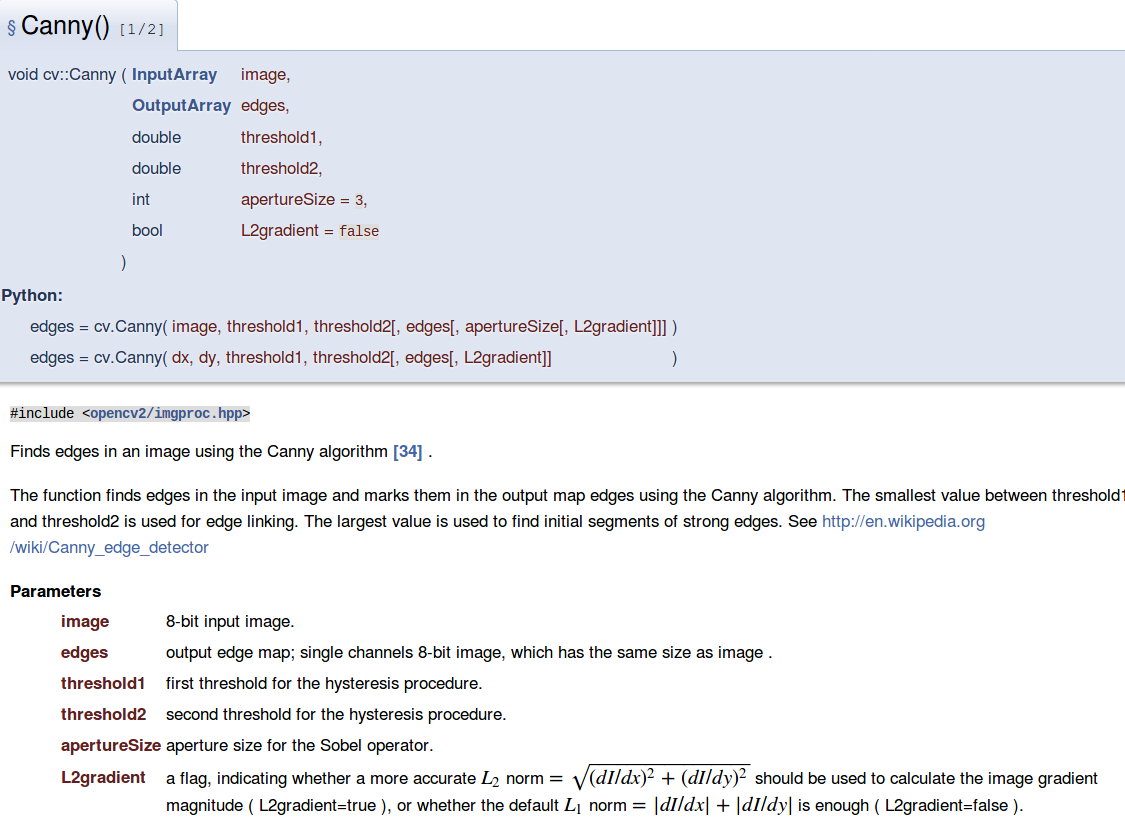
参数3,4表示低阈值和高阈值,L2gradient默认false,表示是否用开平方的方式计算梯度的大小.
opencv示例
from __future__ import print_function
import cv2 as cv
import argparse
max_lowThreshold = 100
window_name = 'Edge Map'
title_trackbar = 'Min Threshold:'
ratio = 3
kernel_size = 3
def CannyThreshold(val):
low_threshold = val
#img_blur = cv.blur(src_gray, (3,3))
detected_edges = cv.Canny(src_gray, low_threshold, low_threshold*ratio, kernel_size)
mask = detected_edges != 0
dst = src * (mask[:,:,None].astype(src.dtype))
cv.imshow(window_name, dst)
src = cv.imread("/home/sc/disk/keepgoing/opencv_test/sidetest.jpeg")
src = cv.GaussianBlur(src, (3, 3), 0)
src_gray = cv.cvtColor(src, cv.COLOR_BGR2GRAY)
cv.namedWindow(window_name)
cv.createTrackbar(title_trackbar, window_name , 0, max_lowThreshold, CannyThreshold)
CannyThreshold(0)
cv.waitKey()
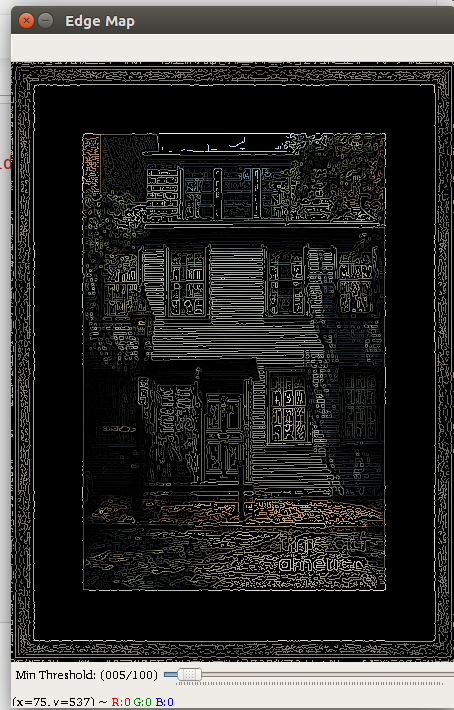
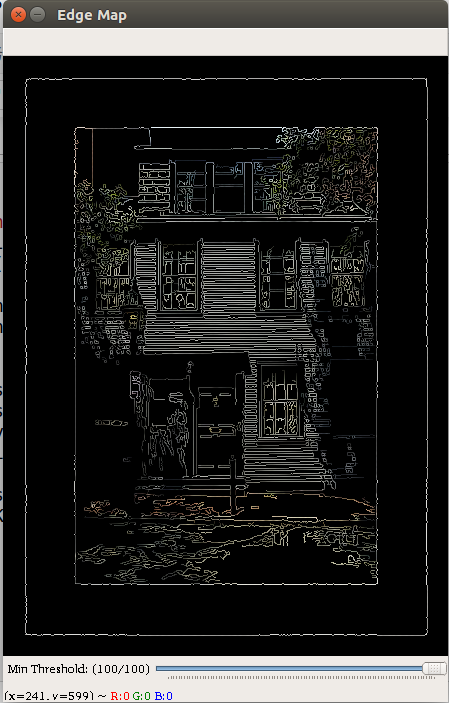
注意阈值的不同造成的影响,可以看到阈值很低的时候线条更多,当然"伪边缘"更多,当阈值很高的时候,"伪边缘"减少了,但也丢失了更多的细节.所以需要根据自己实际的图片数据去调参.
opencv目标检测之canny算法的更多相关文章
- 第三十五节,目标检测之YOLO算法详解
Redmon, J., Divvala, S., Girshick, R., Farhadi, A.: You only look once: Unified, real-time object de ...
- OpenCV:OpenCV目标检测Boost方法训练
在古老的CNN方法出现以后,并不能适用于图像中目标检测.20世纪60年代,Hubel和Wiesel( 百度百科 )在研究猫脑皮层中用于局部敏感和方向选择的神经元时发现其独特的网络结构可以有效地降低反馈 ...
- OpenCV:OpenCV目标检测Adaboost+haar源代码分析
使用OpenCV作图像检测, Adaboost+haar决策过程,其中一部分源代码如下: 函数调用堆栈的底层为: 1.使用有序决策桩进行预测 template<class FEval> i ...
- 目标检测:SSD算法详解
一些概念 True Predict True postive False postive 预测为正类 False negivate True negivate 预测为负类 真实为 ...
- 【58】目标检测之YOLO 算法
YOLO 算法(Putting it together: YOLO algorithm) 你们已经学到对象检测算法的大部分组件了,在这个笔记里,我们会把所有组件组装在一起构成YOLO对象检测算法. ...
- OpenCV:OpenCV目标检测Hog+SWindow源代码分析
参考文章:OpenCV中的HOG+SVM物体分类 此文主要描述出HOG分类的调用堆栈. 使用OpenCV作图像检测, 使用HOG检测过程,其中一部分源代码如下: 1.HOG 检测底层栈的检测计算代码: ...
- 【目标检测】RCNN算法详解
网址: 1. https://blog.csdn.net/zijin0802034/article/details/77685438 (box regression 边框回归) 2. https:// ...
- 第二十九节,目标检测算法之R-CNN算法详解
Girshick, Ross, et al. “Rich feature hierarchies for accurate object detection and semantic segmenta ...
- 目标检测算法之R-CNN算法详解
R-CNN全称为Region-CNN,它可以说是第一个成功地将深度学习应用到目标检测上的算法.后面提到的Fast R-CNN.Faster R-CNN全部都是建立在R-CNN的基础上的. 传统目标检测 ...
随机推荐
- json-server的安装及使用
首先介绍一下什么是json-server,用处是什么,其实很简单:JSON-Server 是一个 Node 模块,运行 Express 服务器,你可以指定一个 json 文件作为 api 的数据源. ...
- 手把手教你用深度学习做物体检测(六):YOLOv2介绍
本文接着上一篇<手把手教你用深度学习做物体检测(五):YOLOv1介绍>文章,介绍YOLOv2在v1上的改进.有些性能度量指标术语看不懂没关系,后续会有通俗易懂的关于性能度量指标的介绍文章 ...
- CF1198E Rectangle Painting 2(最小割 思维
这个题主要是转化为最小割的思路不好想到. 大意:给你一个大的正方形,有的点黑,有的点白,要把黑染白,你每次可以选一个矩形染色,代价是min(长,宽),问最小代价. 思路:对于一个要染色的块来说,他要被 ...
- HDU - 4009 - Transfer water 朱刘算法 +建立虚拟节点
HDU - 4009:http://acm.hdu.edu.cn/showproblem.php?pid=4009 题意: 有n户人家住在山上,现在每户人家(x,y,z)都要解决供水的问题,他可以自己 ...
- BZOJ2152 聪聪可可 (点分治)
2152: 聪聪可可 题意: 在一棵边带权的树中,问任取两个点,这两个点间的权值和是3的倍数的概率. 思路: 经典的点分治题目. 利用点分治在计算所有路径长度,把路径长度对3取模,用t[0],t[1] ...
- 电脑修改密码后,git push 报错unable to access
电脑修改密码后,git push 时报错 remote: Permission to xxx A. fatal: unable to access 解决这个问题有两种方法,一种是界面修改,一种是命令 ...
- 深入vue源码,了解vue的双向数据绑定原理
大家都知道vue是一种MVVM开发模式,数据驱动视图的前端框架,并且内部已经实现了双向数据绑定,那么双向数据绑定是怎么实现的呢? 先手动撸一个最最最简单的双向数据绑定 <div> < ...
- 【Offer】[43] 【1~n整数中1出现的次数】
题目描述 思路分析 测试用例 Java代码 代码链接 题目描述 输入一个整数n,求1~n这n个整数的十进制表示中1出现的次数.例如,输入12, 1~12这些整数中包含1的数字有1.10.11和12,1 ...
- 8 分钟入门 K8s | 详解容器基本概念
作者| 阿里巴巴高级开发工程师 傅伟 一.容器与镜像 什么是容器? 在介绍容器的具体概念之前,先简单回顾一下操作系统是如何管理进程的. 首先,当我们登录到操作系统之后,可以通过 ps 等操作看到各式各 ...
- JDBC处理mysql大数据
大数据也称之为LOB(Large Objects),LOB又分为:clob和blob,clob用于存储大文本,blob用于存储二进制数据,例如图像.声音.二进制文等. 在实际开发中,有时是需要用程序把 ...