ROS探索总结(六)——使用smartcar进行仿真
转自:https://www.ncnynl.com/archives/201609/843.html
总结:
一、机器人描述文件三个:
机器人主体body文件:
gazebo属性文件:
主文件 smartcar.urdf:
二、启动文件smartcar_display.rviz.launch:启动节点和模拟器。
三、新增smartcar_description/config/smartcar_arbotix.yaml文件:
四、urdf.rviz文件:
cp /opt/ros/indigo/share/urdf_tutorial/rviz/urdf.rviz
1.indigo版本机器人主体文件:smartcar_description/urdf/smartcar_body.urdf.xacro
- 修改
property,为xacro:property - 修改
include, 为xacro:include
<?xml version="1.0"?>
<robot name="smartcar" xmlns:xacro="http://ros.org/wiki/xacro">
<xacro:property name="M_PI" value="3.14159"/>
<!-- Macro for SmartCar body. Including Gazebo extensions, but does not include Kinect -->
<xacro:include filename="$(find smartcar_description)/urdf/gazebo.urdf.xacro"/>
<xacro:property name="base_x" value="0.33" />
<xacro:property name="base_y" value="0.33" />
<xacro:macro name="smartcar_body">
<link name="base_link">
<inertial>
<origin xyz="0 0 0.055"/>
<mass value="1.0" />
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
<visual>
<geometry>
<box size="0.25 .16 .05"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0.055"/>
<material name="blue">
<color rgba="0 0 .8 1"/>
</material>
</visual>
<collision>
<origin rpy="0 0 0" xyz="0 0 0.055"/>
<geometry>
<box size="0.25 .16 .05" />
</geometry>
</collision>
</link> <link name="left_front_wheel">
<inertial>
<origin xyz="0.08 0.08 0.025"/>
<mass value="0.1" />
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial> <visual>
<geometry>
<cylinder length=".02" radius="0.025"/>
</geometry>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
</visual>
<collision>
<origin rpy="0 1.57075 1.57075" xyz="0.08 0.08 0.025"/>
<geometry>
<cylinder length=".02" radius="0.025"/>
</geometry>
</collision>
</link> <joint name="left_front_wheel_joint" type="continuous">
<axis xyz="0 0 1"/>
<parent link="base_link"/>
<child link="left_front_wheel"/>
<origin rpy="0 1.57075 1.57075" xyz="0.08 0.08 0.025"/>
<limit effort="" velocity=""/>
<joint_properties damping="0.0" friction="0.0"/>
</joint> <link name="right_front_wheel"> <inertial> <origin xyz="0.08 -0.08 0.025"/> <mass value="0.1" /> <inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/> </inertial> <visual> <geometry> <cylinder length=".02" radius="0.025"/> </geometry> <material name="black"> <color rgba="0 0 0 1"/> </material> </visual> <collision> <origin rpy="0 1.57075 1.57075" xyz="0.08 -0.08 0.025"/> <geometry> <cylinder length=".02" radius="0.025"/> </geometry> </collision> </link> <joint name="right_front_wheel_joint" type="continuous"> <axis xyz="0 0 1"/> <parent link="base_link"/> <child link="right_front_wheel"/> <origin rpy="0 1.57075 1.57075" xyz="0.08 -0.08 0.025"/> <limit effort="" velocity=""/> <joint_properties damping="0.0" friction="0.0"/> </joint> <link name="left_back_wheel"> <inertial> <origin xyz="-0.08 0.08 0.025"/> <mass value="0.1" /> <inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/> </inertial> <visual> <geometry> <cylinder length=".02" radius="0.025"/> </geometry> <material name="black"> <color rgba="0 0 0 1"/> </material> </visual> <collision> <origin rpy="0 1.57075 1.57075" xyz="-0.08 0.08 0.025"/> <geometry> <cylinder length=".02" radius="0.025"/> </geometry> </collision> </link> <joint name="left_back_wheel_joint" type="continuous"> <axis xyz="0 0 1"/> <parent link="base_link"/> <child link="left_back_wheel"/> <origin rpy="0 1.57075 1.57075" xyz="-0.08 0.08 0.025"/> <limit effort="" velocity=""/> <joint_properties damping="0.0" friction="0.0"/> </joint> <link name="right_back_wheel"> <inertial> <origin xyz="-0.08 -0.08 0.025"/> <mass value="0.1" /> <inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/> </inertial> <visual> <geometry> <cylinder length=".02" radius="0.025"/> </geometry> <material name="black"> <color rgba="0 0 0 1"/> </material> </visual> <collision> <origin rpy="0 1.57075 1.57075" xyz="-0.08 -0.08 0.025"/> <geometry> <cylinder length=".02" radius="0.025"/> </geometry> </collision> </link> <joint name="right_back_wheel_joint" type="continuous"> <axis xyz="0 0 1"/> <parent link="base_link"/> <child link="right_back_wheel"/> <origin rpy="0 1.57075 1.57075" xyz="-0.08 -0.08 0.025"/> <limit effort="" velocity=""/> <joint_properties damping="0.0" friction="0.0"/> </joint> <link name="head"> <inertial> <origin xyz="0.08 0 0.08"/> <mass value="0.1" /> <inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/> </inertial> <visual> <geometry> <box size=".02 .03 .03"/> </geometry> <material name="white"> <color rgba="1 1 1 1"/> </material> </visual> <collision> <origin xyz="0.08 0 0.08"/> <geometry> <cylinder length=".02" radius="0.025"/> </geometry> </collision> </link> <joint name="tobox" type="fixed"> <parent link="base_link"/> <child link="head"/> <origin xyz="0.08 0 0.08"/> </joint> </xacro:macro> </robot>
2.gazebo属性部分 smartcar_description/urdf/gazebo.urdf.xacro
<?xml version="1.0"?>
<robot xmlns:controller="http://playerstage.sourceforge.net/gazebo/xmlschema/#controller" xmlns:interface="http://playerstage.sourceforge.net/gazebo/xmlschema/#interface" xmlns:sensor="http://playerstage.sourceforge.net/gazebo/xmlschema/#sensor" xmlns:xacro="http://ros.org/wiki/xacro" name="smartcar_gazebo"> <!-- ASUS Xtion PRO camera for simulation --> <!-- gazebo_ros_wge100 plugin is in kt2_gazebo_plugins package --> <xacro:macro name="smartcar_sim"> <gazebo reference="base_link"> <material>Gazebo/Blue</material> </gazebo> <gazebo reference="right_front_wheel"> <material>Gazebo/FlatBlack</material> </gazebo> <gazebo reference="right_back_wheel"> <material>Gazebo/FlatBlack</material> </gazebo> <gazebo reference="left_front_wheel"> <material>Gazebo/FlatBlack</material> </gazebo> <gazebo reference="left_back_wheel"> <material>Gazebo/FlatBlack</material> </gazebo> <gazebo reference="head"> <material>Gazebo/White</material> </gazebo> </xacro:macro> </robot>
3.主文件:smartcar_description/urdf/smartcar.urdf.xacro
<?xml version="1.0"?>
<robot name="smartcar" xmlns:xi="http://www.w3.org/2001/XInclude" xmlns:gazebo="http://playerstage.sourceforge.net/gazebo/xmlschema/#gz" xmlns:model="http://playerstage.sourceforge.net/gazebo/xmlschema/#model" xmlns:sensor="http://playerstage.sourceforge.net/gazebo/xmlschema/#sensor" xmlns:body="http://playerstage.sourceforge.net/gazebo/xmlschema/#body" xmlns:geom="http://playerstage.sourceforge.net/gazebo/xmlschema/#geom" xmlns:joint="http://playerstage.sourceforge.net/gazebo/xmlschema/#joint" xmlns:controller="http://playerstage.sourceforge.net/gazebo/xmlschema/#controller" xmlns:interface="http://playerstage.sourceforge.net/gazebo/xmlschema/#interface" xmlns:rendering="http://playerstage.sourceforge.net/gazebo/xmlschema/#rendering" xmlns:renderable="http://playerstage.sourceforge.net/gazebo/xmlschema/#renderable" xmlns:physics="http://playerstage.sourceforge.net/gazebo/xmlschema/#physics" xmlns:xacro="http://ros.org/wiki/xacro"> <xacro:include filename="$(find smartcar_description)/urdf/smartcar_body.urdf.xacro" /> <!-- Body of SmartCar, with plates, standoffs and Create (including sim sensors) --> <smartcar_body/> <smartcar_sim/>
</robot>
二、lanuch文件,smartcar_description/launch/smartcar_display.rviz.launch
<launch>
<param name="/use_sim_time" value="false" />
<!-- Load the URDF/Xacro model of our robot -->
<arg name="urdf_file" default="$(find xacro)/xacro.py '$(find smartcar_description)/urdf/smartcar.urdf.xacro'" />
<arg name="gui" default="false" />
<param name="robot_description" command="$(arg urdf_file)" />
<param name="use_gui" value="$(arg gui)"/>
<node name="arbotix" pkg="arbotix_python" type="arbotix_driver" output="screen">
<rosparam file="$(find smartcar_description)/config/smartcar_arbotix.yaml" command="load" />
<param name="sim" value="true"/>
</node>
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" >
</node>
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher">
<param name="publish_frequency" type="double" value="20.0" />
</node>
<!-- We need a static transforms for the wheels -->
<node pkg="tf" type="static_transform_publisher" name="odom_left_wheel_broadcaster" args="0 0 0 0 0 0 /base_link /left_front_link 100" />
<node pkg="tf" type="static_transform_publisher" name="odom_right_wheel_broadcaster" args="0 0 0 0 0 0 /base_link /right_front_link 100" />
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find smartcar_description)/urdf.rviz" />
</launch>
4.在indigo版本里,新增smartcar_description/config/smartcar_arbotix.yaml文件,内容为:
port: /dev/ttyUSB0
baud:
rate:
sync_write: True
sync_read: True
read_rate:
write_rate: controllers: {
# Pololu motors: cpr = 0.3888105m travel = ticks per meter (empirical: )
base_controller: {type: diff_controller, base_frame_id: base_link, base_width: 0.26, ticks_meter: , Kp: , Kd: , Ki: , Ko: , accel_limit: 1.0 }
}
5.urdf.rviz文件:(或者自己按照目录找到了copy过来,如果没有就先安装这个包:urdf_tutorial
$ cp /opt/ros/indigo/share/urdf_tutorial/rviz/urdf.rviz
三、仿真测试
首先运行lanuch,既可以看到rviz中的机器人:
roslaunch smartcar_description smartcar_display.rviz.launch
然后在新建终端中运行:
rostopic pub -r /cmd_vel geometry_msgs/Twist '{linear: {x: 0.5, y: 0, z: 0}, angular: {x: 0, y: 0, z: 0.5}}'
运行结果:
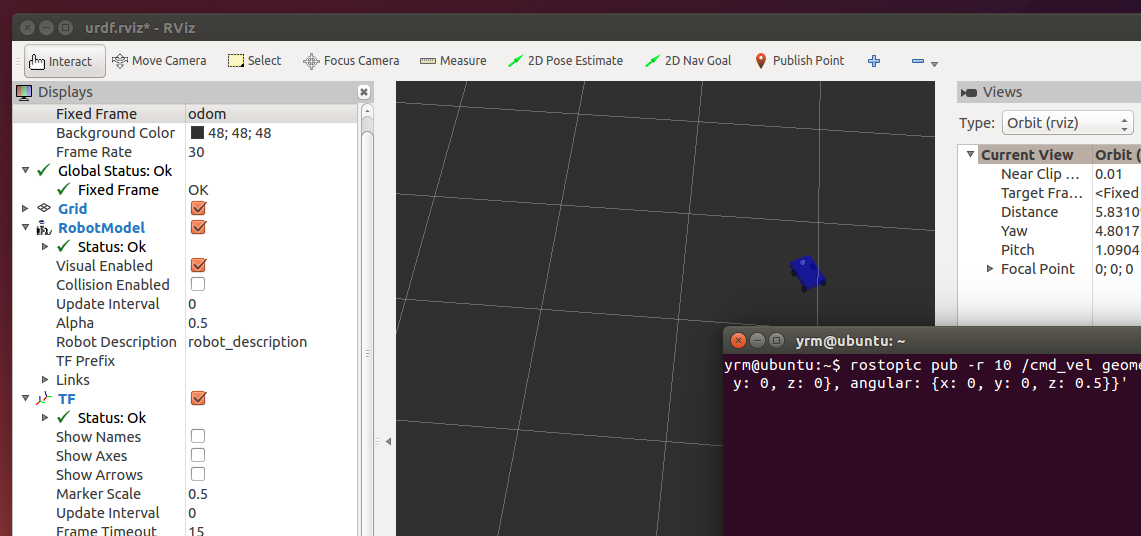
如果小车跑不起来,把Global中的fixed frame改成odom,就好了
ROS探索总结(六)——使用smartcar进行仿真的更多相关文章
- Robot Operating System (ROS)学习笔记2---使用smartcar进行仿真
搭建环境:XMWare Ubuntu14.04 ROS(indigo) 转载自古月居 转载连接:http://www.guyuehome.com/248 一.模型完善 文件夹urdf下,创建ga ...
- ROS学习记录(二)————使用smartcar进行仿真(用.xacro文件来运行rviz)
我发现一个学习ROS系统的好网站: 创客智造http://www.ncnynl.com/ 这里面关于ROS的各个方面都有很详细的介绍. 这周,不,上周我对整个ROS是绝望的,我用一个一个下午的时间在敲 ...
- ROS探索总结(一)——ROS简介
转自古-月 ROS探索总结(一)——ROS简介 一.历史 随着机器人领域的快速发展和复杂化,代码的复用性和模块化的需求原来越强烈,而已有的开源机器人系统又不能很好的适应需求.2010年Willow G ...
- ROS学习笔记六:xxx.launch文件详解
每当我们需要运行一个ROS节点或工具时,都需要打开一个新的终端运行一个命令.当系统中的节点数量不断增加时,每个节点一个终端的模式会变得非常麻烦.那么有没有一种方式可以一次性启动所有节点呢?答案当然是肯 ...
- ROS探索总结(十八)——重读tf
在之前的博客中,有讲解tf的相关内容,本篇博客重新整理了tf的介绍和学习内容,对tf的认识会更加系统. 1 tf简介 1.1 什么是tf tf是一个让用户随时间跟踪多个参考系的功能包,它使用一种树型数 ...
- ROS_Kinetic_07 ROS中机器人三维物理引擎高保真仿真利器gazebo 7.0
ROS_Kinetic_07 ROS中机器人三维物理引擎高保真仿真利器gazebo 7.0 ROS kinetic中的gazebo版本是7.0,有很多新的特性. 首先,启动gazebo: ~$ gaz ...
- ROS探索总结(二)——ROS总体框架
个人分类: ROS 所属专栏: ROS探索总结 一. 总体结构 根据ROS系统代码的维护者和分布来标示,主要有两大部分: (1)main:核心部分,主要由Willow G ...
- 【kinetic】操作系统探索总结(六)使用smartcar进行仿真
p { margin-bottom: 0.1in; direction: ltr; line-height: 120%; text-align: justify } a:link { color: r ...
- ROS进阶学习手记 7.2 -- RViz仿真实例2:Create SmartCar
上一节玩了 exbot 在RViz里的仿真控制,这里我们用urdf文件写个自己的小车模型,ref: http://blog.csdn.net/hcx25909/article/details/8904 ...
随机推荐
- 【VS2013编译DirectX Tutorials时遇到的错误】FXC : error X3501: 'main': entrypoint not found
修改于2015年9月6日: 去年写这篇解决方案的时候其实对着色器编程还一知半解,摸索了一个治标不治本的方法解决问题,结果被一个CSDN的博主原封不动抄了去,还打上个原创的标签= =,简直无语... 最 ...
- svg札记
1.人老了,有些事情太容易忘记了,这里做下笔记,供参考,for self for you. 2.源于地图监控,建筑级别各大地图商的api(高德.百度.腾讯等)已经足够使用,唯独室内图这块还差点. 3. ...
- Mybatis_总结_03_用_动态SQL
一.前言 MyBatis 的强大特性之一便是它的动态 SQL.如果你有使用 JDBC 或其它类似框架的经验,你就能体会到根据不同条件拼接 SQL 语句的痛苦.例如拼接时要确保不能忘记添加必要的空格,还 ...
- 康托展开与逆康托展开模板(O(n^2)/O(nlogn))
O(n2)方法: namespace Cantor { ; int fac[N]; void init() { fac[]=; ; i<N; ++i)fac[i]=fac[i-]*i; } in ...
- web.xml & web-fragment.xml (Servlet 2.3, 2.4, 2.5 + 3.0)模板
转自:http://jlcon.iteye.com/blog/890964 web.xml v2.3 <?xml version="1.0" encoding="I ...
- BZOJ5341: [Ctsc2018]暴力写挂
BZOJ5341: [Ctsc2018]暴力写挂 https://lydsy.com/JudgeOnline/problem.php?id=5341 分析: 学习边分治. 感觉边分治在多数情况下都能用 ...
- Yii 常用命令
一.Yii的Active Recorder包装了很多. 特别是把SQL中 把where,order,limit,IN/not IN,like等常用短句都包含进CDbCriteria这个类中去,这样整个 ...
- C++对C语言的拓展(2)—— inline内联函数
C语言中有宏函数的概念.宏函数的特点是内嵌到调用代码中去,避免了函数调用 的开销.但是由于宏函数的处理发生在预处理阶段,缺失了语法检测和有可能带来的语意差错. 1.内联函数基本概念 C++提供了 in ...
- axios 请求报错
报错如下: 解决:axios的请求配置中的baseURL配置错误,修改好即可. 报错前: baseURL: "192.168.30.220:3000", 解决后:baseURL: ...
- win32 获取本机网卡信息(MAC地址,IP地址等)
由于一个需求需要获取网卡的MAC地址,就搜了一下,大部分都是COPY来COPY去的一些代码,有很多甚至不能直接运行或有还有内存泄漏.自己查了一下MSDN然后封装了一下: 需要注意,一个机器可能有多个网 ...