VINS中的重力-尺度-速度初始化(2)
VINS中的重力-尺度-速度初始化(2)
细化重力
\(\quad\)上一篇文章中得到的 \(g\) 一般是存在误差的。因为在实际应用中,当地的重力向量的模一般是已知固定大小的(所以只有两个自由度未知),而我们在前面求解时并没有利用这个条件,因此最后计算出来的重力向量很难刚好满足这个条件。于是,在vins的初始化中,还会对得到的重力向量进行修正。
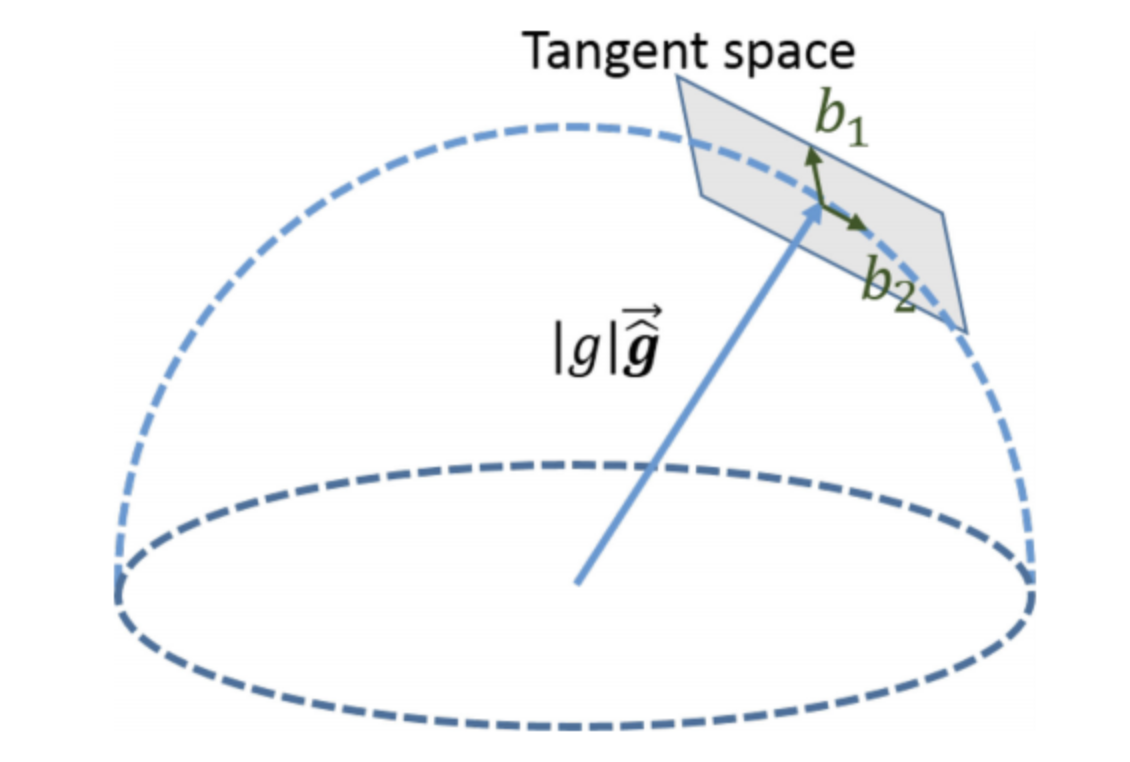
\(\quad\)首先,作者对重力向量进行参数化:
\]
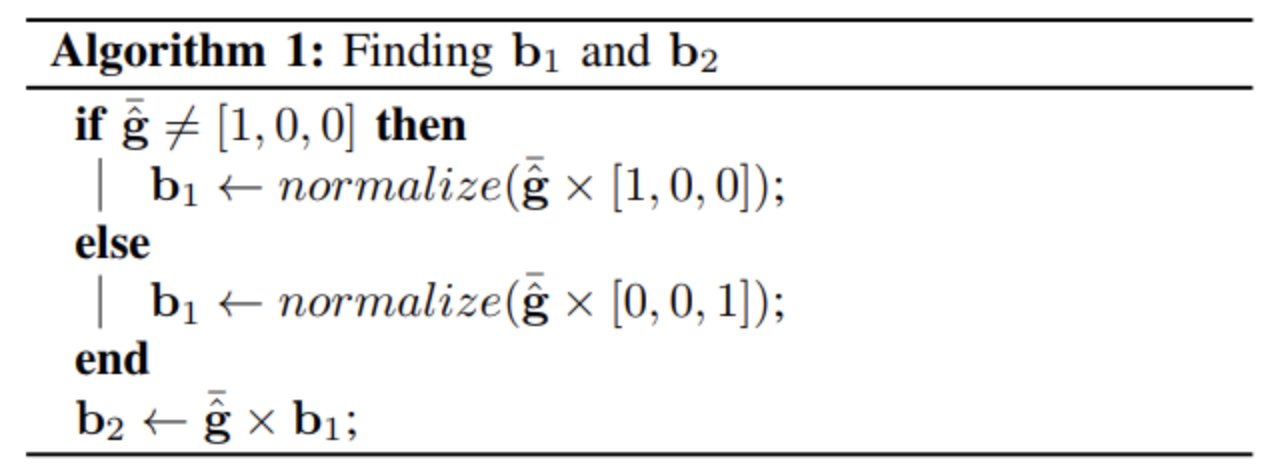
其中,\(\overline{\hat{g}}\)是上一步中估计得到的重力向量方向的单位向量,\(b_1\)与\(b_2\)是另外两个单位向量,是\(\overline{\hat{g}}\)切平面上的两个互相垂直的单位向量,获得方式如下:
此时我们可以从上面的式子知道,原本三维的优化变量 \(g^{c 0}\) 已经可以使用两维的 \(w^{2 \times 1}\) 替代。参考上一节的推导,待优化变量变成了
v_{b_{k}}^{b_{k}} \\
v_{b_{k+1}}^{b_{k+1}} \\
w^{2 \times 1} \\
s
\end{array}\right]
\]
最后得到的观测方程也变为了
-I \Delta t_{k} & 0 & \frac{1}{2} R_{c_{0}}^{b_{k}} \Delta t_{k}^{2} \vec{b} & R_{c_{0}}^{b_{k}}\left(p_{c_{k+1}}^{c_{0}}-p_{c_{k}}^{c_{0}}\right) \\
-I & R_{c_{0}}^{b_{k}} R_{b_{k+1}}^{c_{0}} & R_{c_{0}}^{b_{k}} \Delta t_{k} \vec{b} & 0
\end{array}\right]\left[\begin{array}{c}
v_{b_{k}}^{b_{k}} \\
v_{b_{k+1}}^{b_{k+1}} \\
w \\
s
\end{array}\right]=\left[\begin{array}{c}
\alpha_{b_{k+1}}^{b_{k}}+R_{c_{0}}^{b_{k}} R_{b_{k+1}}^{c_{0}} p_{c}^{b}-p_{c}^{b}-\frac{1}{2} R_{c_{0}}^{b_{c}} \Delta t_{k}^{2}\|g\| \hat{\hat{g}} \\
\beta_{b_{k+1}}^{b_{k}}-R_{c_{0}}^{b_{k}} \Delta t_{k}\|g\| \hat{g}
\end{array}\right]
\]
基于新得到的观测方程(可以使用LDLT分解求解),我们可以通过重力约束不断地对初始化结果进行修正,迭代对其 进行求解(vins中迭代了4次),最后得到一个修正后的初始化结果。
与世界坐标系对齐
这一步一般是最后一步,一般世界坐标系选择的是东北天坐标系。则这个对齐操作就是得到将重力向量旋转到Z轴上的旋转矩阵,这个旋转矩阵就是将原本坐标变换到世界坐标系(东北天坐标系)的变换矩阵。
找到这个变换矩阵后,接下来就是使用这个变换矩阵将位姿,速度等状态信息都变换到世界坐标系下。
加速度计bias
通过上面的阅读,我们会发现在vins的初始化中并没有对加速度计的bias进行估计,感觉对于超定的方程,多计算一个加速度计的bias好像也不是什么难事,,而且建模应该会更准确。在这个初始化工作的论文中其实有解释原因:
- 通过仿真实验证明,如果运动不剧烈,加速度计的bias很难被观测出来;
- 忽略加速计的bias对估计其他初始值的影响不大;
- 加速度计的bias是可以通过之后的VIO紧耦合优化,慢慢估计出来的;
参考资料
- [1] https://github.com/HKUST-Aerial-Robotics/VINS-Mono
- [2] VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator, Tong Qin, Peiliang Li, Zhenfei Yang, Shaojie Shen, IEEE Transactions on Robotics
- [3] https://xhy3054.github.io/
VINS中的重力-尺度-速度初始化(2)的更多相关文章
- VI ORB-SLAM初始化与VINS初始化对比(将vi orb-slam初始化方法移植到vins中)
初始化时需要求出的变量:相机和imu外参r t.重力g.尺度s.陀螺仪和加速度计偏置ba bg. 下面对两种算法初始化的详细步骤进行对比: 求陀螺仪偏置bg 求解公式相同,求解方法不同.公式如下,VI ...
- SpringMVC的Controller中使用线程安全的初始化
因为SpringMVC的Controller默认是单例, 在这种情况下, Controller中使用的私有变量必须也是单例, 例如各种service, 否则会有多线程访问数据互相修改的问题. 对于需要 ...
- Struts2中实现Web项目的初始化工作
Struts2中实现Web项目的初始化工作 注:通常web系统在启动时需要做一些初始化的工作,比如初始化系统全局变量,加载自定义配置文件,启动定时任务等. 一.在Struts中实现系统的初始化工作 ...
- [百度空间] [转] 在 Visual C++ 中控制全局对象的初始化顺序
from: http://blog.csdn.net/classfactory/archive/2004/08/07/68202.aspx 在 C++ 中,同一个翻译单位(.cpp文件)里的全局对象的 ...
- java中哪些数值不能被初始化
main方法中的变量不能被初始化 final修饰的变量不能被初始化·
- 如何设置vim中tab键缩进---配置初始化设置
转载自:http://blog.51cto.com/xuding/1725376:加了一些补充说明 问题: Linux系统下,Tab键默认为8个字符,需呀将其修改为4个字符的方式使用 步骤: 1.在用 ...
- linux内核中网络文件系统的注册初始化
针对内核3.9 系统开启时,会使用init/main.c,然后再里面调用kernel_init(),在里面会再调用do_basic_setup(),调用do_initcalls(),调用do_one_ ...
- 从以下哪一个选项中可以获得Servlet的初始化参数。
从以下哪一个选项中可以获得Servlet的初始化参数. A.Servlet B.ServletContext C.ServletConfig D.GenericServlet 解答:C servlet ...
- C++ 类中的static成员的初始化和特点
C++ 类中的static成员的初始化和特点 #include <iostream> using namespace std; class Test { public: Test() : ...
- 记一次uboot中gunzip解压速度慢的问题排查
背景 在项目中需要用到解压功能,之前还记录了下,将uboot解压代码移植到另外的bootloader中时,碰到的效率问题.最终查明是cache的配置导致的. https://www.cnblogs.c ...
随机推荐
- springboot 多环境配置及配置文件的位置
了解即可
- Request header field userRole is not allowed by Access-Control-Allow-Headers in preflight response.
今使用axios 请求数据过程中遇到同事设置的请求头,在我请求的接口中部不被允许,于是老是提示Request header field userRole is not allowed by Acces ...
- \n被当成回车处理
Regex.Escape C# 字符串变量str 的值为"a\nb"如果直接输出显示的话,就成了:ab需要输出显示为:a\nb string str = "a\nb& ...
- Java并发(九)----线程join、interrupt
1.join 方法详解 1.1 为什么需要 join? 下面的代码执行,打印 r 是什么? static int r = 0; public static void main(String[] arg ...
- celery笔记二之建立celery项目、配置及几种加载方式
本文首发于公众号:Hunter后端 原文链接:celery笔记二之建立celery项目.配置及几种加载方式 接下来我们创建一个 celery 项目,文件夹及目录如下: proj/__init__.py ...
- oracle常用函数(持续更新)
1.table() 把返回结果集合的函数返回的结果,以表的形式返回 例:table(p_split('1,2,3'),',') 2.to_char() 按照指定格式输出字符串 to_char(sysd ...
- 尚医通-day14【创建订单】(内附源码)
页面预览 订单详情 订单列表 第01章-创建订单 生成订单分析 生成订单方法参数:就诊人id与 排班id 生成订单需要获取就诊人信息(微服务远程调用service-user) 获取排班信息与规则信息( ...
- PostgreSQL 12 文档: 部分 IV. 客户端接口
部分 IV. 客户端接口 这一部分描述和PostgreSQL一起发布的客户端编程接口.这些章中的每一个都能被独立阅读.注意,还有很多用于客户端程序的其他编程接口是被独立发布的并且包含它们自己的文档(附 ...
- 学习C++这一篇就够了(提升篇)
C++中除了面向对象的编程思想外,还有另一种就是泛型编程 主要用到的技术就是模板 模板机制的分类: 函数模板 类模板 函数模板 作用:建立一个通用函数,其函数返回值类型和形参类型可以不具体定制,用虚拟 ...
- Unity的OnOpenAsset:深入解析与实用案例
Unity OnOpenAsset 在Unity中,OnOpenAsset是一个非常有用的回调函数,它可以在用户双击资源文件时自动打开一个编辑器窗口.这个回调函数可以用于自定义资源编辑,提高工作效率. ...