立体像对空间前方交会-点投影系数法(python实现)
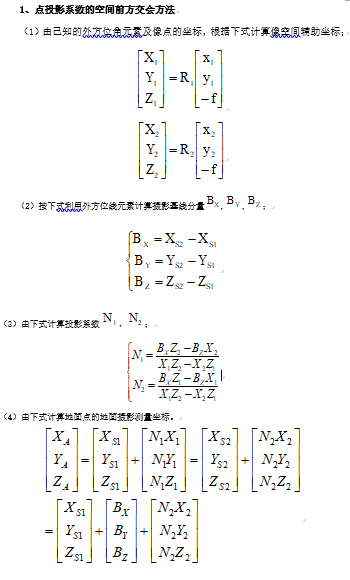
一、原理

二、步骤
a.用各自像片的角元素计算出左右像片的旋转矩阵R1和R2。
b.根据左右像片的外方位元素计算摄影基线分量Bx,By,Bz。
c.逐点计算像点的空间辅助坐标。
d.计算投影系数。
e.计算未知点的地面摄影测量坐标。
f.重复以上步骤完成所有点的地面坐标的计算。
三、示例代码
# -*- coding: utf-8 -*-
"""
Created on Mon Nov 25 08:18:30 2019 @author: L JL
""" import numpy as np
import math as m def r_mat(f,w,k):
Rf = np.mat([[m.cos(f), 0, -m.sin(f)],
[0, 1, 0],
[m.sin(f), 0, m.cos(f)]]) Rw = np.mat([[1, 0, 0],
[0, m.cos(w), -m.sin(w)],
[0, m.sin(w), m.cos(w)]]) Rk = np.mat([[m.cos(k), -m.sin(k), 0],
[m.sin(k), m.cos(k), 0],
[0, 0, 1]]) R = Rf*Rw*Rk return R def SpatialAuxiliaryCoordinate(xy,f,R):
coor1 = np.mat([[xy[0]],
[xy[1]],
[-f]])
coor2 = R*coor1
return coor2
def ProjectionCoefficient(SAC1,SAC2,B):
N1 = (B[0,0]*SAC2[2,0]-B[2,0]*SAC2[0,0])/(SAC1[0,0]*SAC2[2,0]-SAC2[0,0]*SAC1[2,0])
N2 = (B[0,0]*SAC1[2,0]-B[2,0]*SAC1[0,0])/(SAC1[0,0]*SAC2[2,0]-SAC2[0,0]*SAC1[2,0])
return N1,N2 #main
left_HomonymousImagePoints = [0.153,91.798]
right_HomonymousImagePoints = [-78.672,89.122] left_In = np.mat([0,0,152.91])
left_Ex = np.mat([[970302.448784],
[-1138644.971216],
[3154.584941],
[0.010425],
[-0.012437],
[0.003380]])
right_In = np.mat([0,0,152.91])
right_Ex = np.mat([[971265.303768],
[-1138634.245942],
[3154.784258],
[0.008870],
[-0.005062],
[-0.008703]]) R_L = np.mat(np.zeros((3,3)))
R_R = np.mat(np.zeros((3,3)))
left_SACoordinate = np.mat(np.zeros((3,1)))
right_SACoordinate = np.mat(np.zeros((3,1)))
baselineComponent = np.mat(np.zeros((3,1))) R_L = r_mat(left_Ex[3,0],left_Ex[4,0],left_Ex[5,0])
R_R = r_mat(right_Ex[3,0],right_Ex[4,0],right_Ex[5,0]) #left_SpatialAuxiliaryCoordinate = R_L*left_In.T
#right_SpatialAuxiliaryCoordinate = R_R*right_In.T
left_SACoordinate = SpatialAuxiliaryCoordinate(left_HomonymousImagePoints,left_In[0,2],R_L)
right_SACoordinate = SpatialAuxiliaryCoordinate(right_HomonymousImagePoints,right_In[0,2],R_R) baselineComponent = right_Ex[0:3,0] - left_Ex[0:3,0]
N1,N2 = ProjectionCoefficient(left_SACoordinate,right_SACoordinate,baselineComponent)
#GPhotogrammetrCoordinates
GPCoordinates = np.mat(np.zeros((3,1)))
GPCoordinates = ((left_Ex[0:3,0]+N1*left_SACoordinate) + (right_Ex[0:3,0]+N2*right_SACoordinate))/2 print("左影像同名点:",left_HomonymousImagePoints)
print("左影像同名点:",right_HomonymousImagePoints)
print("地面点坐标:\n X=%f,\n Y=%f,\n Z=%f"
%(GPCoordinates[0,0],GPCoordinates[1,0],GPCoordinates[2,0]))
立体像对空间前方交会-点投影系数法(python实现)的更多相关文章
- 立体像对空间前方交会-共线方程求解法(python实现)
一.原理 二.步骤 a.用各自像片的角元素计算出左右像片的旋转矩阵R1和R2. b.有同名像点列出共线方程. c.将方程写为未知数的线性方程形式,计算线性系数. d.写出误差方程,系数矩阵与常数项. ...
- 相关性系数及其python实现
参考文献: 1.python 皮尔森相关系数 https://www.cnblogs.com/lxnz/p/7098954.html 2.统计学之三大相关性系数(pearson.spearman.ke ...
- LSH︱python实现局部敏感随机投影森林——LSHForest/sklearn(一)
关于局部敏感哈希算法.之前用R语言实现过,可是由于在R中效能太低.于是放弃用LSH来做类似性检索.学了python发现非常多模块都能实现,并且通过随机投影森林让查询数据更快.觉得能够试试大规模应用在数 ...
- Python实现客观赋权法
本文从阐述Python实现客观赋权法的四种方式: 一. 熵权法 二. 因子分析权数法(FAM) 三. 主成分分析权数法(PCA) 四. 独立性权系数法 Python实现客观赋权法,在进行赋权前,先导入 ...
- Python 名称空间与作用域、闭包与装饰器
Python 的名称 Python 的名称(Name)是对象的一个标识(Identifier).我们知道,在 Python 里面一切皆对象,名称就是用来引用对象的.说得有点玄乎,我们以例子说明. 例如 ...
- python基础语法6 名称空间与作用域
目录: 1.函数对象 2.函数嵌套 3.名称空间 4.作用域 函数是第一类对象 1.函数名是可以被引用: def index(): print('from index') a = index a() ...
- Python名称空间与作用域
什么是名称空间? 比如下图的长方形代表内存,在这个内存里我要设置一个变量100,那么这个变量得有个门牌号,就叫他a吧,但其实变量不是这么存储的,他其实的存储方式是这样的,他会有一个名称空间,这个名称空 ...
- Python基础之函数:1、函数的介绍及名称空间
目录 一.函数 1.什么是函数 2.函数的语法结构 3.函数的定义与调用 4.函数的分类 5.函数的返回值 6.函数的参数 二.函数参数 1.位置参数 2.默认参数 3.可变长参数 1.一个*号 2. ...
- 3.2 一般的哈尔空间Vj
例3.2给予我们继续往下面做的动力.很明显的我们对于g(t)的逼近还是太粗糙了.很自然的,我们会想到,如果继续细分我们的短点,比如每1/2取一个值,甚至每1/4取一个值,那么就会有更好的逼近效果. 不 ...
随机推荐
- HearthBuddy修改系统时间
将以下代码保存在.bat文件,然后用管理员权限运行 pushd "%~dp0" #下面修改时间,根据操作系统的语言不同,会有不同的格式,比如2019-10-26date 10/26 ...
- How to receive JSON as an MVC 5 action method parameter
How to receive JSON as an MVC 5 action method parameter 解答1 Unfortunately, Dictionary has problems ...
- JVM 字节码的结构
编译的.class文件,可以用javap进行反编译 javap Test.class javap -c Test.class javap -verbose Test.class 1.创建MyTest1 ...
- Spring’s RestTemplate
Spring’s RestTemplate /** * After the word document is generated in memory we can upload it to the s ...
- ES6 克隆对象 浅克隆:只能克隆原始对象自身的值,不能克隆它继承的值
https://www.cnblogs.com/xbblogs/p/8954165.html return JSON.parse(JSON.stringify(origin)) 最早由Barbara ...
- AndoridSQLite数据库开发基础教程(6)
AndoridSQLite数据库开发基础教程(6) 为数据库添加添加空表 如果开发者想要往数据库中添加表和列,操作步骤如下: (1)在打开的数据库中,单击左下方的“+”按钮,弹出Table Edito ...
- java类型 jdbcType类型 mysql类型关系
java类型 jdbcType类型 mysql类型关系 Java类型 JdbcType Mysql类型 备注 String VARCHAR VARCHAR 变长字符串 String LONGVARCH ...
- iptables 配置场景3
iptables -I INPUT -i lo -j ACCEPT #允许本地回环地址访问: iptables -I INPUT -m state --state ESTABLISHED,REL ...
- 初始化html font-size
(function () { var docEl = document.documentElement, resizeEvt = 'orientationchange' in window ? 'or ...
- 从0开始学爬虫8使用requests/pymysql和beautifulsoup4爬取维基百科词条链接并存入数据库
从0开始学爬虫8使用requests和beautifulsoup4爬取维基百科词条链接并存入数据库 Python使用requests和beautifulsoup4爬取维基百科词条链接并存入数据库 参考 ...