【持续更新】 | OpenCV 学习笔记
本文地址:http://www.cnblogs.com/QingHuan/p/7365732.html,转载请注明出处
###############################################################################
OpenCV的入门书籍有很多,这里选择的是《OpenCV 3计算机视觉-Python语言实现-第二版》
所有书上的源代码:https://github.com/techfort/pycv
安装过程请查看我的另一篇博客:
http://www.cnblogs.com/QingHuan/p/7354074.html
###############################################################################
第2章 处理文件、摄像头和图形用户界面
2.1 基本I/O脚本
2.1.5 捕获摄像头的帧
下面的代码实现了捕获摄像头10秒的视频信息,并将其写入一个AVI文件中
import cv2 cameraCapture = cv2.VideoCapture(0)
fps = 30
size = (int(cameraCapture.get(cv2.CAP_PROP_FRAME_WIDTH)),
int(cameraCapture.get(cv2.CAP_PROP_FRAME_HEIGHT)))
videoWriter = cv2.VideoWriter(
'MyOutputVid.avi', cv2.VideoWriter_fourcc('I', '', '', ''),
fps, size) success, frame = cameraCapture.read()
numFrameRemaining = 10*fps - 1
while success and numFrameRemaining > 0:
videoWriter.write(frame)
success, frame = cameraCapture.read()
numFrameRemaining -= 1 cameraCapture.release()
2.1.6 在窗口显示图像
一般情况下使用imshow()来显示图片,图片会闪一下然后消失,下面代码可以是图片一直显示
import cv2
import numpy img = cv2.imread("data/aero1.jpg")
cv2.imshow('Test Image', img)
cv2.waitKey()
cv2.destroyAllWindows()
虽然左上角没有关闭按钮,但是随便按一个按键,都会将其关闭
2.1.7 实时显示摄像头的内容
import cv2
import numpy clicked = False
def onMouse(event, x, y, flags, param):
global clicked
if event == cv2.EVENT_FLAG_LBUTTON:
clicked = True cameraCapture = cv2.VideoCapture(0)
cv2.namedWindow('MyWindow')
cv2.setMouseCallback('MyWindow', onMouse) print 'Show camera feed. Click window or press any key to stop' success, frame = cameraCapture.read()
while success and cv2.waitKey(1) == -1 and not clicked:
cv2.imshow('MyWindow', frame)
success, frame = cameraCapture.read() cv2.destroyWindow('MyWindow')
cameraCapture.release()
setMouseCallback可以获取鼠标的输入
namedWindow()用来创建窗口
imshow()用来显示窗口
destroyWindow()用来销毁窗口
cameraCapture.release()用来释放摄像头
cv2.waitKey(1) == -1 :
参数为等待键盘触发的时间,返回值-1表示没有按键被按下
OpenCV不能处理窗口,当单击窗口的关闭按钮时,并不能将其关闭
2.3 一个小程序—— Cameo——面向对象的设计
2.3.1 使用 managers.CaptureManager 提取视频流
这里中文版讲的不太通顺,建议看看英文原版
# CaptureManager 高级I/O流接口 import cv2
import numpy
import time # 初始化CaptureManager类 class CaptureManager(object): def __init__(self, capture, previewWindowManager = None,
shouldMirrorPreview = False): # 更新:前面有下划线的是非公有变量,主要与当前帧的状态与文件写入操作有关
# self 类似于结构体,里面有很多变量,下面是在初始化这些变量
# 类比于C++ 中学的"类"来比较
self.previewWindowManager = previewWindowManager
self.shouldMirrorPreview = shouldMirrorPreview self._capture = capture
self._channel = 0
self._enteredFrame = False
self._frame = None
self._imageFilename = None
self._videoFilename = None
self._videoEncoding = None
self._videoWriter = None self._startTime = None
self._frameElapsed = long(0)
self._fpsEstimate = None # @ 符号的解释参见:http://gohom.win/2015/10/25/pyDecorator/
@property
def channel(self):
return self._channel @channel.setter
def channel(self, value):
if self._channel != value
self._channel = value
self._frame = None @property
def frame(self):
if self._enteredFrame and self._frame is None:
_, self._frame = self._capture.retrieve()
return self._frame @property
def isWritingImage (self):
return self._imageFilename is not None @property
def isWrtingVideo(self):
return self._videoFilename is not None def enterFrame(self):
"""Capture the next frame, if any"""
暂停在书Page 30
代码暂时写到这里,因为这里根本不认真讲原理,就是简单的堆砌代码,
感觉学习不到知识,所以就不看了,跳到下一章
第3章 使用OpenCV 3 处理图像
3.2 傅立叶变换
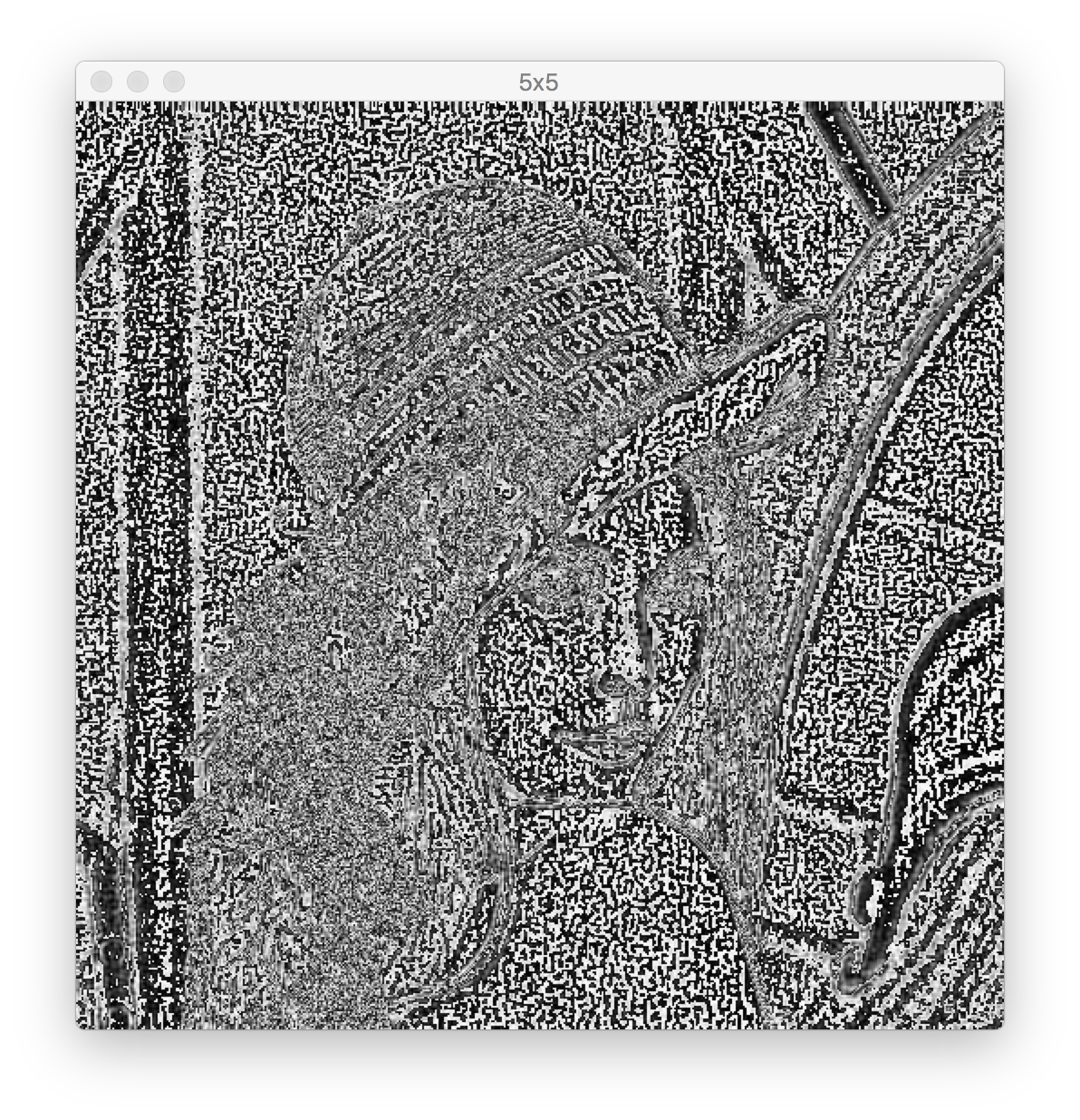
下面是一个高通滤波器和低通滤波器的例子:注意看注释,写的很详细
import cv2
import numpy as np
from scipy import ndimage # kernel defined by ourself
kernel_3x3 = np.array([[-1, -1, -1],
[-1, 8, -1],
[-1, -1, -1]]) kernel_5x5 = np.array([[-1, -1, -1, -1, -1],
[-1, 1, 2, 1, -1],
[-1, 2, 4, 2, -1],
[-1, 1, 2, 1, -1],
[-1, -1, -1, -1, -1]]) # http://docs.opencv.org/3.1.0/d4/da8/group__imgcodecs.html
# in func "imread", 0 means trans to gray image
img = cv2.imread("data/lena.jpg", 0) k3 = ndimage.convolve(img, kernel_3x3)
k5 = ndimage.convolve(img, kernel_5x5) """Gaussian kernel: The function convolves the source image
with the specified Gaussian kernel. GaussianBlur(src, ksize, sigmaX[, dst[, sigmaY[, borderType]]]) -> dst @param ksize Gaussian kernel size. ksize.width and ksize.height can differ but they both must be
. positive and odd. Or, they can be zero's and then they are computed from sigma.
@param sigmaX Gaussian kernel standard deviation in X direction.""" # here is a per-defined Gaussian Blur and the
# kernel is set to 11x11, start in X axis direction
# Attention: GaussianBlur is a low pass filter but the above two are high pass filters
# after minus with the origin image, finally equivalent to a high pass filter
blurred = cv2.GaussianBlur(img, (11, 11), 0)
g_hpf = img - blurred cv2.imshow("3x3", k3)
cv2.imshow("5x5", k5)
cv2.imshow("g_hpf", g_hpf)
cv2.waitKey()
cv2.destroyAllWindows()
可以看一下处理效果:
原图:

高通滤波器:
3x3 kernel:

5x5 kernel:
用低通滤波器处理后的图片,与原图相减,得到高通滤波器的效果:(原理待查)
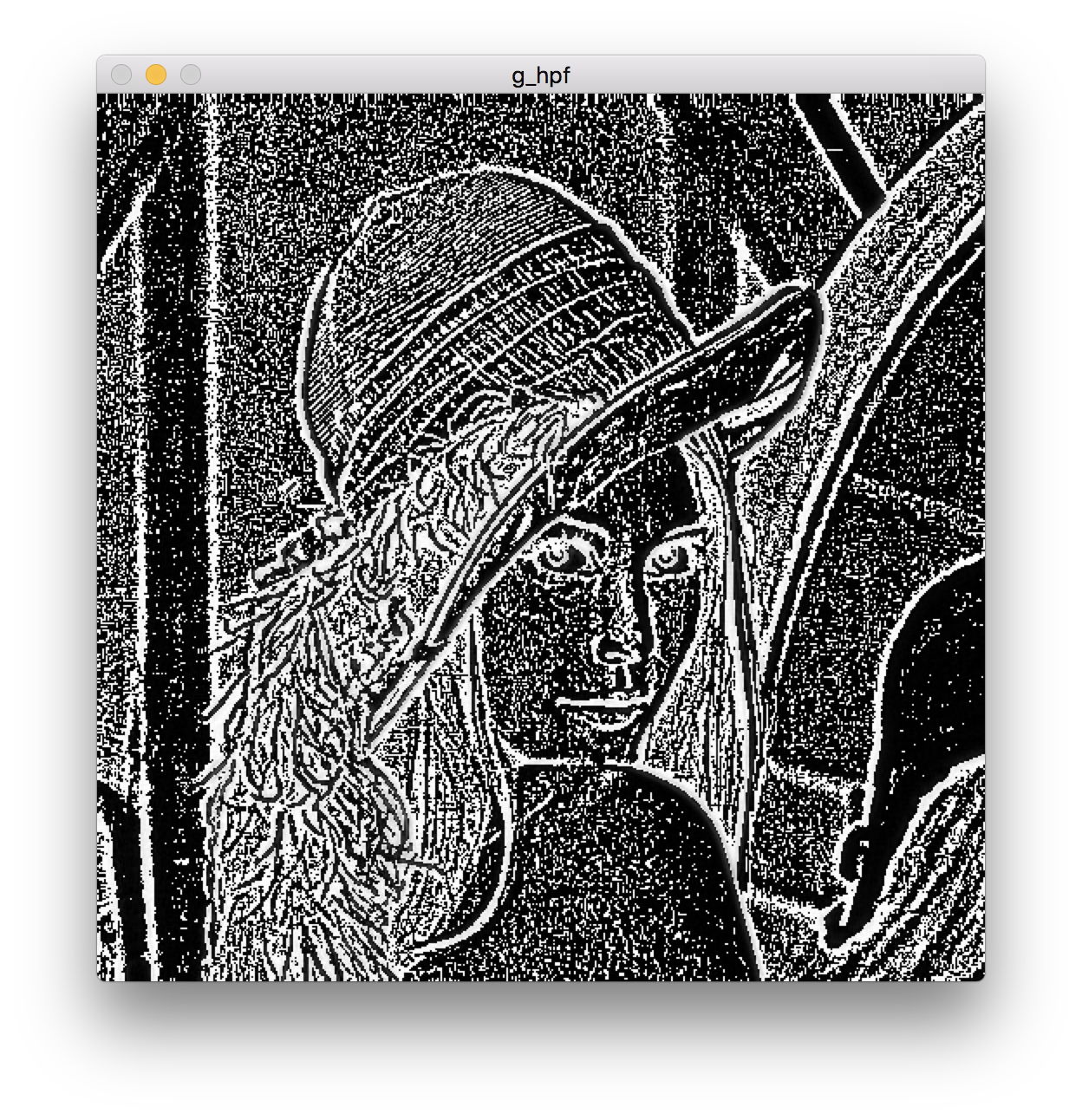
可以发现第三张图的效果最好
中间都跳过去了,书上讲的不好,所以只是大概看了一遍没有敲代码
读完这本书一定要换一本再补充一下
3.7 Canny 边缘检测
Canny函数可以非常方便的识别出边缘,
例子如下:
import cv2
import numpy as np
import filters
from scipy import ndimage img = cv2.imread("data/lena.jpg", 0)
cv2.imwrite("lena_edge.jpg", cv2.Canny(img, 200, 300)) cv2.imshow("lena", cv2.imread("lena_edge.jpg"))
cv2.waitKey()
cv2.destroyAllWindows()
lena_edge.jpg:

3.8 简单的轮廓检测
首先创建了一个黑色图像,然后在中间放了一个白色方块。然后对方块寻找轮廓并把轮廓标注出来
(其实没有看懂代码)
# -*- coding: utf-8 -*
import cv2
import numpy as np
import filters
from scipy import ndimage # dark, blank image
img = np.zeros((200, 200), dtype=np.uint8)
# assign the middle square white
img[50:150, 50:150] = 255 # 二值化
ret, thresh = cv2.threshold(img, 127, 255, 0) image, contours, hierarchy = cv2.findContours(thresh,
cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
color = cv2.cvtColor(image, cv2.COLOR_GRAY2BGR) img = cv2.drawContours(color, contours, -1, (0, 255, 0), 2) cv2.imshow("contours", color)
cv2.waitKey()
cv2.destroyAllWindows()
结果:

3.9 找到一个图形的边界框、最小矩形区域和最小闭圆的轮廓
# -*- coding: utf-8 -*
import cv2
import numpy as np img = cv2.pyrDown(cv2.imread("pycv-master/chapter3/hammer.jpg", cv2.IMREAD_UNCHANGED)) ret, thresh = cv2.threshold(cv2.cvtColor(img.copy(), cv2.COLOR_BGR2GRAY) , 127, 255, cv2.THRESH_BINARY)
image, contours, hier = cv2.findContours(thresh, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) for c in contours:
# find bounding box coordinates
x,y,w,h = cv2.boundingRect(c) # 画一个正方形
cv2.rectangle(img, (x,y), (x+w, y+h), (0, 255, 0), 2) # 画最贴近的正方形,有一定的旋转
# find minimum area
rect = cv2.minAreaRect(c)
# calculate coordinates of the minimum area rectangle
box = cv2.boxPoints(rect)
# normalize coordinates to integers
box = np.int0(box)
# draw contours
cv2.drawContours(img, [box], 0, (0,0, 255), 3) # 画一个圆正好包裹住
# calculate center and radius of minimum enclosing circle
(x,y),radius = cv2.minEnclosingCircle(c)
# cast to integers
center = (int(x),int(y))
radius = int(radius)
# draw the circle
img = cv2.circle(img,center,radius,(0,255,0),2) cv2.drawContours(img, contours, -1, (255, 0, 0), 1)
cv2.imshow("contours", img) cv2.waitKey()
cv2.destroyAllWindows() cv2.imwrite("hammer_contours.jpg", img)
结果:

【持续更新】 | OpenCV 学习笔记的更多相关文章
- (转) OpenCV学习笔记大集锦 与 图像视觉博客资源2之MIT斯坦福CMU
首页 视界智尚 算法技术 每日技术 来打我呀 注册 OpenCV学习笔记大集锦 整理了我所了解的有关OpenCV的学习笔记.原理分析.使用例程等相关的博文.排序不分先后,随机整理的 ...
- OpenCV学习笔记(27)KAZE 算法原理与源码分析(一)非线性扩散滤波
http://blog.csdn.net/chenyusiyuan/article/details/8710462 OpenCV学习笔记(27)KAZE 算法原理与源码分析(一)非线性扩散滤波 201 ...
- OpenCV 学习笔记 07 目标检测与识别
目标检测与识别是计算机视觉中最常见的挑战之一.属于高级主题. 本章节将扩展目标检测的概念,首先探讨人脸识别技术,然后将该技术应用到显示生活中的各种目标检测. 1 目标检测与识别技术 为了与OpenCV ...
- OpenCV学习笔记3
OpenCV学习笔记3 图像平滑(低通滤波) 使用低通滤波器可以达到图像模糊的目的.这对与去除噪音很有帮助.其实就是去除图像中的高频成分(比如:噪音,边界).所以边界也会被模糊一点.(当然,也有一些模 ...
- opencv学习笔记(七)SVM+HOG
opencv学习笔记(七)SVM+HOG 一.简介 方向梯度直方图(Histogram of Oriented Gradient,HOG)特征是一种在计算机视觉和图像处理中用来进行物体检测的特征描述子 ...
- opencv学习笔记(六)直方图比较图片相似度
opencv学习笔记(六)直方图比较图片相似度 opencv提供了API来比较图片的相似程度,使我们很简单的就能对2个图片进行比较,这就是直方图的比较,直方图英文是histogram, 原理就是就是将 ...
- opencv学习笔记(五)镜像对称
opencv学习笔记(五)镜像对称 设图像的宽度为width,长度为height.(x,y)为变换后的坐标,(x0,y0)为原图像的坐标. 水平镜像变换: 代码实现: #include <ios ...
- opencv学习笔记(四)投影
opencv学习笔记(四)投影 任选了一张图片用于测试,图片如下所示: #include <cv.h> #include <highgui.h> using namespace ...
- opencv学习笔记(三)基本数据类型
opencv学习笔记(三)基本数据类型 类:DataType 将C++数据类型转换为对应的opencv数据类型 OpenCV原始数据类型的特征模版.OpenCV的原始数据类型包括unsigned ch ...
- opencv学习笔记(二)寻找轮廓
opencv学习笔记(二)寻找轮廓 opencv中使用findContours函数来查找轮廓,这个函数的原型为: void findContours(InputOutputArray image, O ...
随机推荐
- Loj 6036 「雅礼集训 2017 Day4」编码 - 2-sat
题目传送门 唯一的传送门 题目大意 给定$n$个串,每个串只包含 ' .问是否可能任意两个不同的串不满足一个是另一个的前缀. 2-sat的是显然的. 枚举每个通配符填0还是1,然后插入Trie树. 对 ...
- 如何快速实现 markdown 转 HTML 文档?
我想要在 Github 上开一个主题博客,我希望通过 Markdown 语法写作,然后生成 HTML 并附带自定义样式显示在网页上. 我找到了 gulp-markdown 这个库,看起来符合我的需求场 ...
- 为虚拟机配置固定ip地址
vim /etc/sysconfig/network-scripts/ifcfg-eth0 修改BOOTPROTO为static 新增IPADDR即可 如下图所示
- 『TensorFlow』读书笔记_降噪自编码器
『TensorFlow』降噪自编码器设计 之前学习过的代码,又敲了一遍,新的收获也还是有的,因为这次注释写的比较详尽,所以再次记录一下,具体的相关知识查阅之前写的文章即可(见上面链接). # Aut ...
- 关于vs code 快速生成vue 模板
在 文件>首选项>用户代码片断里面,打开vue.json 添加以下代码: "Print to console": { "prefix": " ...
- [spring源码] 小白级别的源码解析ioc(二)
之前一篇,整体描述了一下 Spring的整体概况和 jar包的介绍. 现在开始进入具体的源码解析,从本篇开始,先介绍spring的ioc容器.之前也看过一些介绍spring源码的, 有的是只讲整体的接 ...
- C#Windows窗体中添加了AxWindowsMediaPlayer的详细用法影响键盘操作的问题
最近在写一个飞机大战游戏,但在为游戏背景添加声音的时候,发现添加了AxWindowsMediaPlayer的详细用法音乐控件不能再通过键盘控制飞机的移动了,在网上查了许久,没找到原因,差点就想去找老师 ...
- 在flask中使用websocket-实时消息推送
- flask默认使用wsgi支持http协议,如需使用websocket需要安装gevent-websocket模块,http,websocket协议都可以支持 Django应用:channel T ...
- 238. Product of Array Except Self除自身以外数组的乘积
网址:https://leetcode.com/problems/product-of-array-except-self/ 参考:https://leetcode.com/problems/prod ...
- CentOS 每个版本的区别
当我们下载CentOS 7 时会发现有几个版本可以选择,如下: 1.CentOS-7-DVD版本:DVD是标准安装盘,一般下载这个就可以了. 2.CentOS-7-NetInstall版本:网络安装镜 ...