DeepHyperX代码理解-HamidaEtAl
代码复现自论文《3-D Deep Learning Approach for Remote Sensing Image Classification》
先对部分基础知识做一些整理:
一、局部连接与参数共享(都减少了参数计算量)
局部连接:基于图像局部相关的原理,保留了图像局部结构,同时减少了网络的权值个数,加快了学习速率,同时也在一定程度上减少了过拟合的可能。
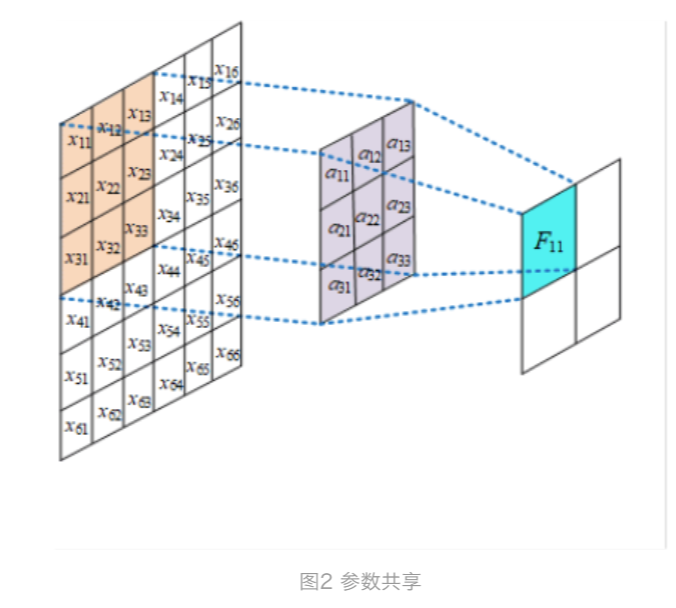
参数共享:下面用图例解释参数共享与不共享的区别。
如图是一个3*3大小的卷积核在进行特征提取,channel=1, 在每个位置进行特征提取的时候都是共享一个卷积核,假设有k个channel,则参数
总量为3*3*k,注意不同channel的参数是不能共享的。
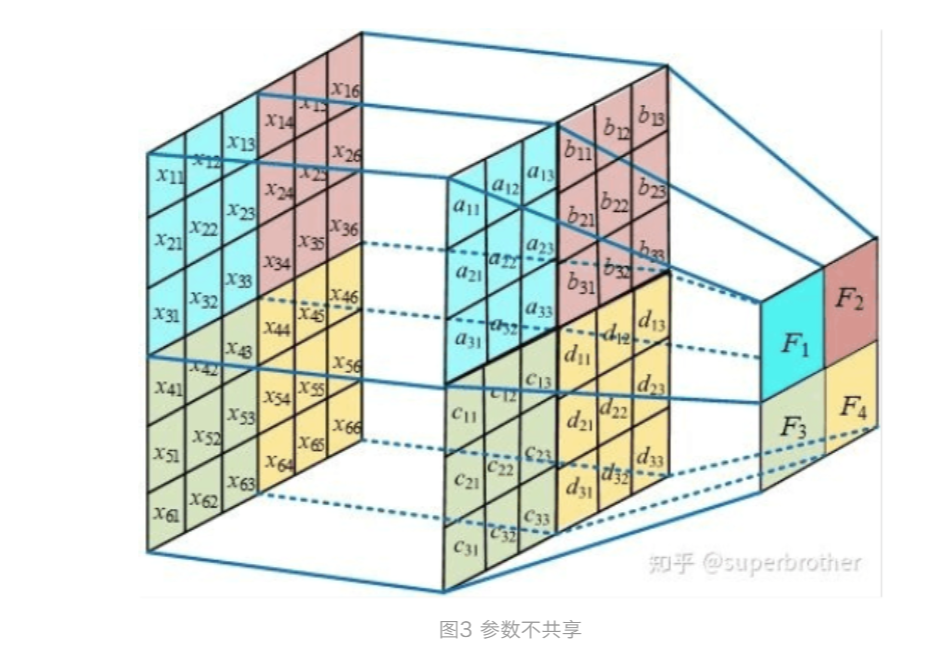
假设现在不使用参数共享,则卷积核作用于矩阵上的每一个位置时其参数都是不一样的,则卷积核的参数数量就与像素矩阵的大小保持一致了,假
设有k个channel,则参数数量为weight*height*k,这对于尺寸较大的图片来说明显是不可取的。
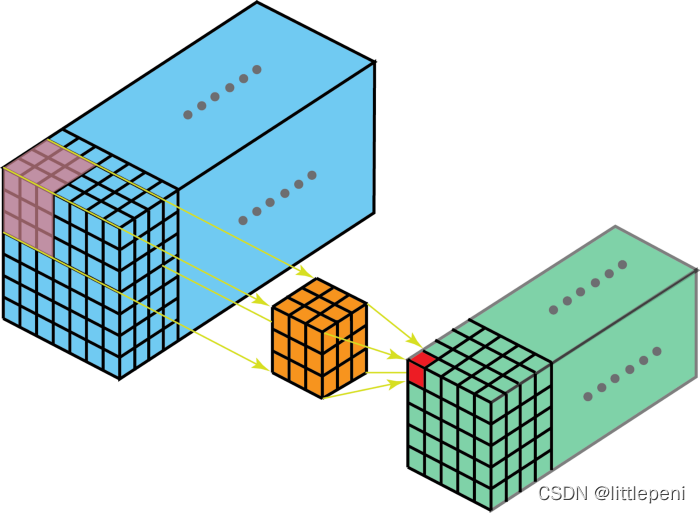
二、多通道输入输出:
首先理解fliter与kernel区别:kernel是fliter的组成成分,一个fliter就会对应生成一个特征图。
下图为多通道输入,单通道输出。有一个fliter,一个fliter包括三个kernel,最后生成一个特征图(一个fliter就对应一个特征图)
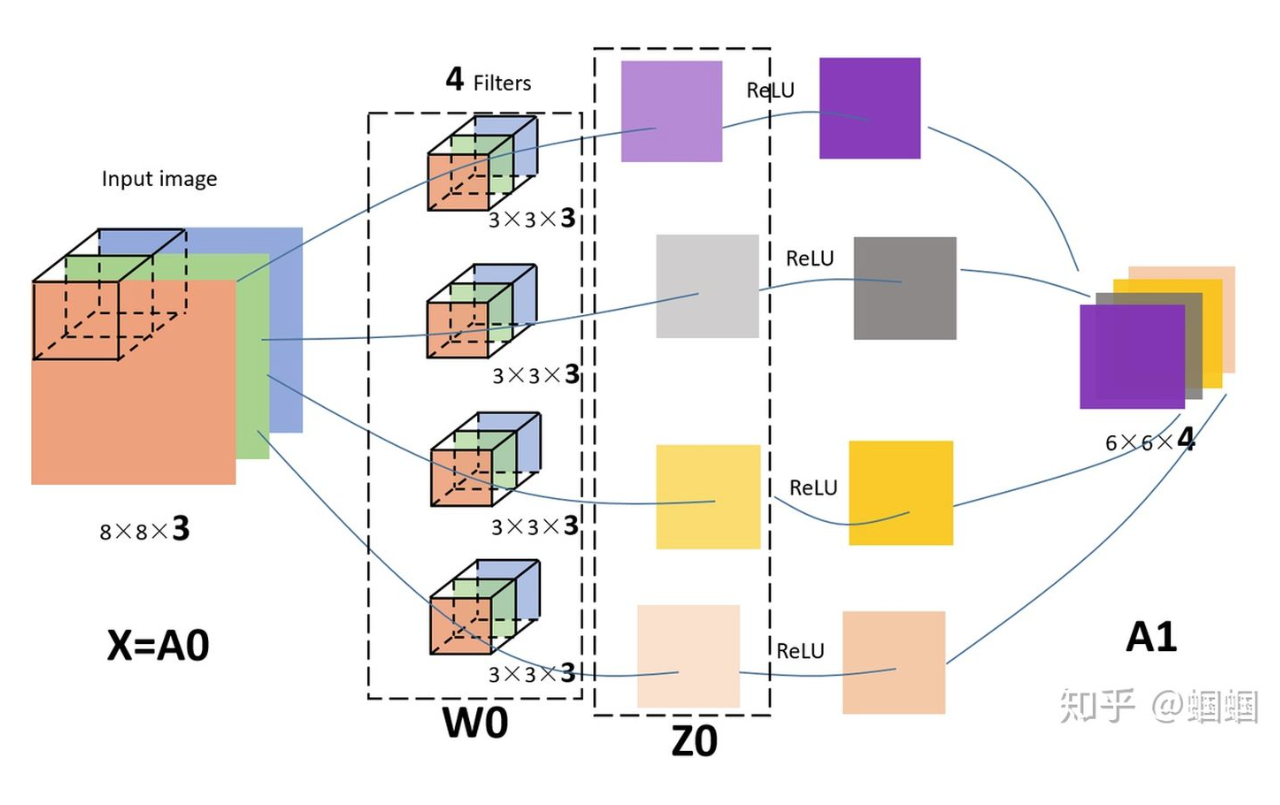
下图为直观展示,输入为8*8*3的RGB三通道图片,设置了4个fliter对应四个输出通道,也就是输出4个特征图。每个fliter有3个kernel。
三、2D卷积代码示例:
1 import torch as t
2 import torch.nn as nn
3
4 class A(nn.Module):
5 def __init__(self):
6 super(A, self).__init__()
7 #三个2D卷积层结构,每个卷积层的输入和输出通道数均为2,卷积核和大小是(3, 3)
8 #torch.nn.Conv2d(in_channels, out_channels, kernel_size, stride=1,
9 #padding=0, dilation=1, groups=1, bias=True,
10 #padding_mode='zeros', device=None, dtype=None)
11 self.conv1 = nn.Conv2d(2, 2, kernel_size=(3, 3))
12 self.conv2 = nn.Conv2d(2, 2, kernel_size=(3, 3))
13 self.conv3 = nn.Conv2d(2, 2, kernel_size=(3, 3))
14
15 a = A()
16 print(list(a.parameters()))
运行结果:
1 [Parameter containing:
2 tensor([[[[ 0.0213, -0.2054, 0.0985],
3 [ 0.1254, 0.1202, -0.1115],
4 [-0.0280, 0.0256, 0.1975]],
5
6 [[-0.2118, -0.1683, 0.0056],
7 [-0.0554, 0.2255, -0.1548],
8 [ 0.1747, 0.0449, 0.1606]]],
9
10
11 [[[-0.1328, -0.1700, -0.1048],
12 [ 0.0911, -0.2230, 0.0685],
13 [ 0.0886, 0.1765, -0.1879]],
14
15 [[-0.0581, 0.1266, -0.1030],
16 [-0.0170, 0.0387, -0.0641],
17 [-0.0127, -0.2099, -0.2213]]]], requires_grad=True), Parameter containing:
18 tensor([ 0.0877, -0.1969], requires_grad=True), Parameter containing:
19 tensor([[[[-0.0266, 0.1511, -0.0034],
20 [-0.1070, -0.1734, -0.1017],
21 [ 0.0053, 0.1358, -0.0542]],
22
23 [[-0.0436, 0.1587, -0.0375],
24 [ 0.0125, -0.0431, -0.0877],
25 [-0.0766, 0.0405, -0.1306]]],
26
27
28 [[[-0.1449, -0.0315, -0.0236],
29 [ 0.0118, 0.2230, -0.2137],
30 [-0.1108, -0.1178, 0.0027]],
31
32 [[ 0.2184, 0.1964, -0.0959],
33 [-0.0385, -0.0523, 0.2135],
34 [-0.0387, 0.1951, -0.1546]]]], requires_grad=True), Parameter containing:
35 tensor([-0.0942, -0.2029], requires_grad=True), Parameter containing:
36 tensor([[[[ 8.9598e-02, -3.3190e-02, 1.0606e-01],
37 [-2.2397e-02, 2.0944e-01, -6.8180e-02],
38 [-1.7312e-01, 2.2318e-01, 1.9368e-01]],
39
40 [[ 7.0529e-02, -2.0741e-01, -1.2648e-01],
41 [-1.7503e-01, 1.7972e-01, -1.0417e-01],
42 [-1.9124e-01, -4.2022e-02, 1.4635e-01]]],
43
44
45 [[[-8.0857e-02, 8.5098e-03, 7.0629e-02],
46 [ 1.6926e-01, -1.7654e-02, -9.3033e-02],
47 [-2.9836e-02, -2.2935e-01, 1.1450e-01]],
48
49 [[ 1.3848e-01, -5.7713e-02, 1.5293e-04],
50 [-6.3998e-03, -1.0745e-01, 2.8835e-03],
51 [-1.7894e-01, 2.2133e-01, 5.2435e-02]]]], requires_grad=True), Parameter containing:
52 tensor([-0.1026, 0.0207], requires_grad=True)]
上面代码是定义的一个2D卷积网络架构,有3个卷积层,每个卷积层的输入通道和输出通道(对应fliter为2)都为2,每个fliter中有两个3*3的kernel(对应两个输入通道)。代码中的两个1*2的向量为bias。
四、3D卷积的示意图和示例代码:
1 class B(nn.Module):
2 def __init__(self):
3 super(B, self).__init__()
4 self.conv1 = nn.Conv3d(
5 1, # 输入图像的channel数,C_in
6 3, # 卷积产生的channel数,C_out
7 kernel_size=2, # 卷积核的尺寸,这里实际是(2,2,2),第一维表示卷积核处理的帧数
8 stride=(1,1,1), # 卷积步长,(D,H,W)
9 padding=(0,0,0), # 输入的每一条边补充0的层数,(D,H,W)
10 bias=False)
11 self.conv2 = nn.Conv3d(1, 3, kernel_size=(2, 2, 2), stride=(1, 1, 1), padding=(0, 0, 0), bias=False)
12
13 b = B()
14 print(list(b.parameters()))
运行结果:
1 [Parameter containing:
2 tensor([[[[[-0.0895, -0.1651],
3 [-0.1319, 0.2510]],
4
5 [[-0.1616, -0.2614],
6 [ 0.0383, 0.2656]]]],
7
8
9
10 [[[[-0.0809, -0.1821],
11 [-0.0624, -0.1401]],
12
13 [[-0.3170, 0.1499],
14 [-0.3449, 0.2639]]]],
15
16
17
18 [[[[ 0.2779, -0.0731],
19 [ 0.0439, -0.0353]],
20
21 [[ 0.2853, -0.3177],
22 [ 0.0559, -0.3290]]]]], requires_grad=True), Parameter containing:
23 tensor([[[[[-0.2529, -0.0537],
24 [ 0.0955, -0.1513]],
25
26 [[ 0.0310, 0.2558],
27 [-0.1903, -0.1561]]]],
28
29
30
31 [[[[-0.2919, -0.3142],
32 [ 0.0190, -0.1089]],
33
34 [[-0.0586, 0.1541],
35 [-0.2402, -0.3339]]]],
36
37
38
39 [[[[-0.3260, -0.0500],
40 [ 0.1392, 0.1486]],
41
42 [[ 0.1664, 0.1514],
43 [ 0.0345, -0.1979]]]]], requires_grad=True)]
三维数据输入通道为1,输出通道为3,那么fliter数为3,每个fliter中有1个kernel(2,2,2),因为两个3Dconv参数一样,所以每个3Dconv有3个2*2*2的tensor。这里如果对应到高光谱数据集,输入通道也为1。因为整个高光谱数据集就是一个3维的volume,整个数据集图像由长*宽*光谱维组成。
论文复现:
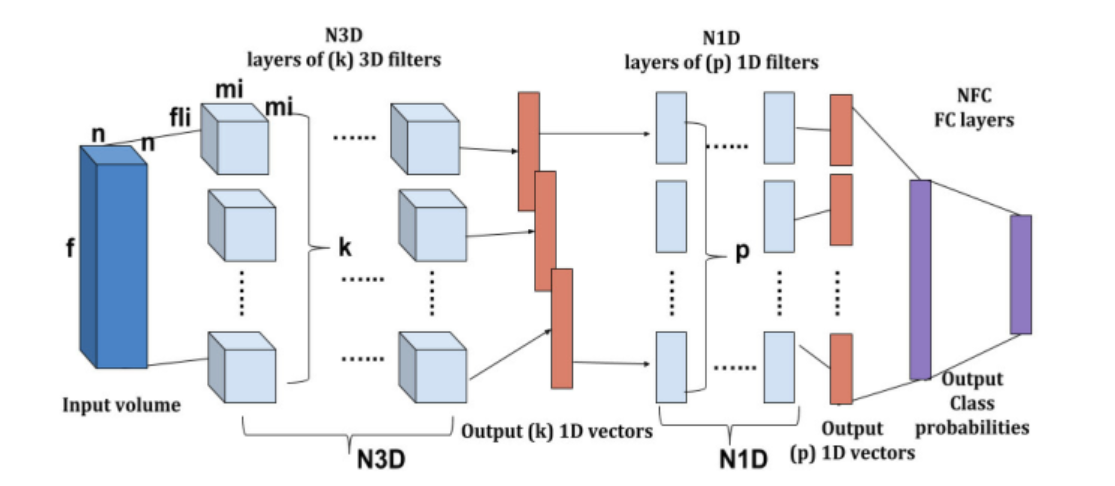
原论文网络结构:
复现网络:
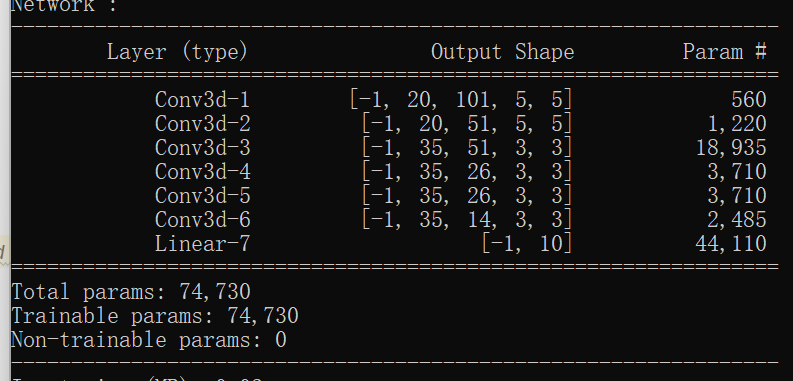
输入维度:Image has dimensions 610x340 and 103 channels
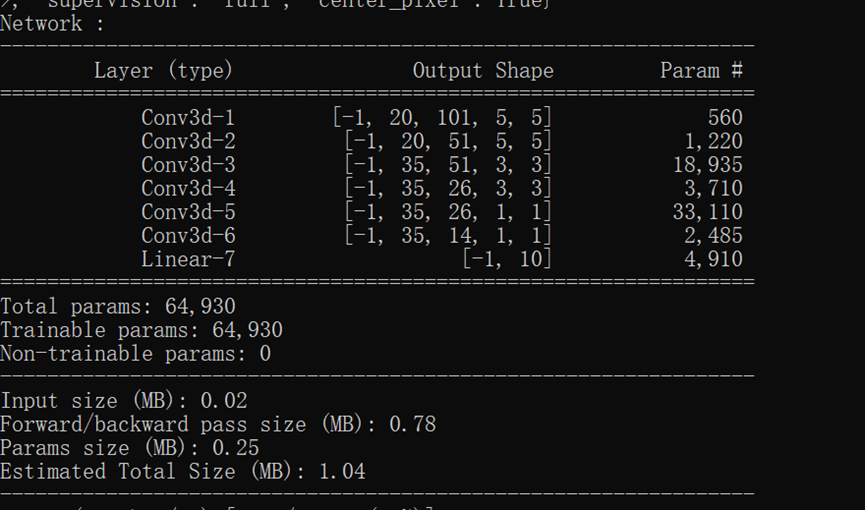
网络结构及参数:
复现代码:
1 elif name == "hamida":
2 patch_size = kwargs.setdefault("patch_size", 5)
3 center_pixel = True
4 model = HamidaEtAl(n_bands, n_classes, patch_size=patch_size)
5 lr = kwargs.setdefault("learning_rate", 0.01)
6 optimizer = optim.SGD(model.parameters(), lr=lr, weight_decay=0.0005)
7 kwargs.setdefault("batch_size", 100)
8 criterion = nn.CrossEntropyLoss(weight=kwargs["weights"])
1 class HamidaEtAl(nn.Module):
2 """
3 3-D Deep Learning Approach for Remote Sensing Image Classification
4 Amina Ben Hamida, Alexandre Benoit, Patrick Lambert, Chokri Ben Amar
5 IEEE TGRS, 2018
6 https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=8344565
7 """
8
9 @staticmethod
10 def weight_init(m):#权重初始化
11 if isinstance(m, nn.Linear) or isinstance(m, nn.Conv3d):
12 init.kaiming_normal_(m.weight) #kaiming_normal_均匀初始化方法
13 init.zeros_(m.bias)
14
15 def __init__(self, input_channels, n_classes, patch_size=5, dilation=1):
16 super(HamidaEtAl, self).__init__()
17 # The first layer is a (3,3,3) kernel sized Conv characterized
18 # by a stride equal to 1 and number of neurons equal to 20
19 self.patch_size = patch_size#每次截取图像patch大小(5,5)
20 self.input_channels = input_channels#输入通道数(波段数)
21 dilation = (dilation, 1, 1)
22
23 if patch_size == 3:
24 self.conv1 = nn.Conv3d(
25 1, 20, (3, 3, 3), stride=(1, 1, 1), dilation=dilation, padding=1
26 )
27 else:
28 self.conv1 = nn.Conv3d(
29 1, 20, (3, 3, 3), stride=(1, 1, 1), dilation=dilation, padding=0
30 )
31 # Next pooling is applied using a layer identical to the previous one
32 # with the difference of a 1D kernel size (1,1,3) and a larger stride
33 # equal to 2 in order to reduce the spectral dimension
34 #为什么要用卷积层要替代池化层:
35 # 使用2×2的最大池化,与使用卷积(stride为2)来做down sample性能并没有明显差别,
36 # 而且使用卷积(stride为2)相比卷积(步进为1)+池化,还可以减少卷积运算量和一个池化层。何乐而不为呢。
37 self.pool1 = nn.Conv3d(
38 20, 20, (3, 1, 1), dilation=dilation, stride=(2, 1, 1), padding=(1, 0, 0)
39 )
40 # Then, a duplicate of the first and second layers is created with
41 # 35 hidden neurons per layer.
42 self.conv2 = nn.Conv3d(
43 20, 35, (3, 3, 3), dilation=dilation, stride=(1, 1, 1), padding=(1, 0, 0)
44 )
45 self.pool2 = nn.Conv3d(
46 35, 35, (3, 1, 1), dilation=dilation, stride=(2, 1, 1), padding=(1, 0, 0)
47 )
48 # Finally, the 1D spatial dimension is progressively reduced
49 # thanks to the use of two Conv layers, 35 neurons each,
50 # with respective kernel sizes of (1,1,3) and (1,1,2) and strides
51 # respectively equal to (1,1,1) and (1,1,2)
52 self.conv3 = nn.Conv3d(
53 35, 35, (3, 1, 1), dilation=dilation, stride=(1, 1, 1), padding=(1, 0, 0)
54 )
55 self.conv4 = nn.Conv3d(
56 35, 35, (2, 1, 1), dilation=dilation, stride=(2, 1, 1), padding=(1, 0, 0)
57 )
58
59 # self.dropout = nn.Dropout(p=0.5)
60
61 self.features_size = self._get_final_flattened_size()
62 # The architecture ends with a fully connected layer where the number
63 # of neurons is equal to the number of input classes.
64 self.fc = nn.Linear(self.features_size, n_classes)
65
66 self.apply(self.weight_init)
67
68 def _get_final_flattened_size(self):#计算fc前的输出tensor大小,用随机的X去测试得到,这样就不用自己去推到了
69 with torch.no_grad():
70 x = torch.zeros(
71 (1, 1, self.input_channels, self.patch_size, self.patch_size)
72 )
73 x = self.pool1(self.conv1(x))
74 x = self.pool2(self.conv2(x))
75 x = self.conv3(x)
76 x = self.conv4(x)
77 _, t, c, w, h = x.size()
78 return t * c * w * h
79
80 def forward(self, x):
81 x = F.relu(self.conv1(x))
82 x = self.pool1(x)
83 x = F.relu(self.conv2(x))
84 x = self.pool2(x)
85 x = F.relu(self.conv3(x))
86 x = F.relu(self.conv4(x))
87 x = x.view(-1, self.features_size)#对tensor resize相当于做展平(flatten)操作
88 # x = self.dropout(x)
89 x = self.fc(x)
90 return x
关于参数dilation的解释:https://blog.csdn.net/qimo601/article/details/112624091
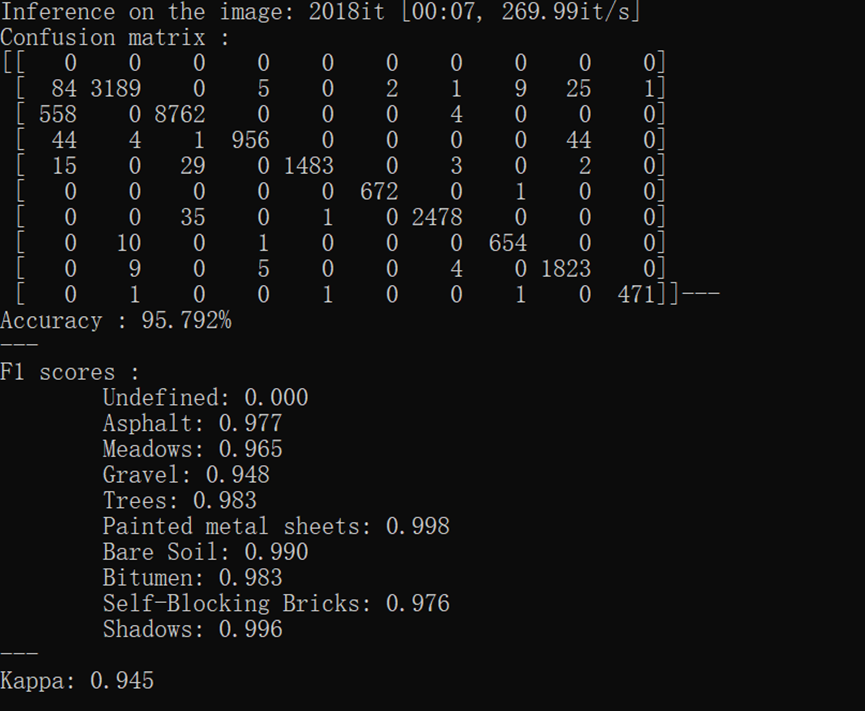
运行结果:
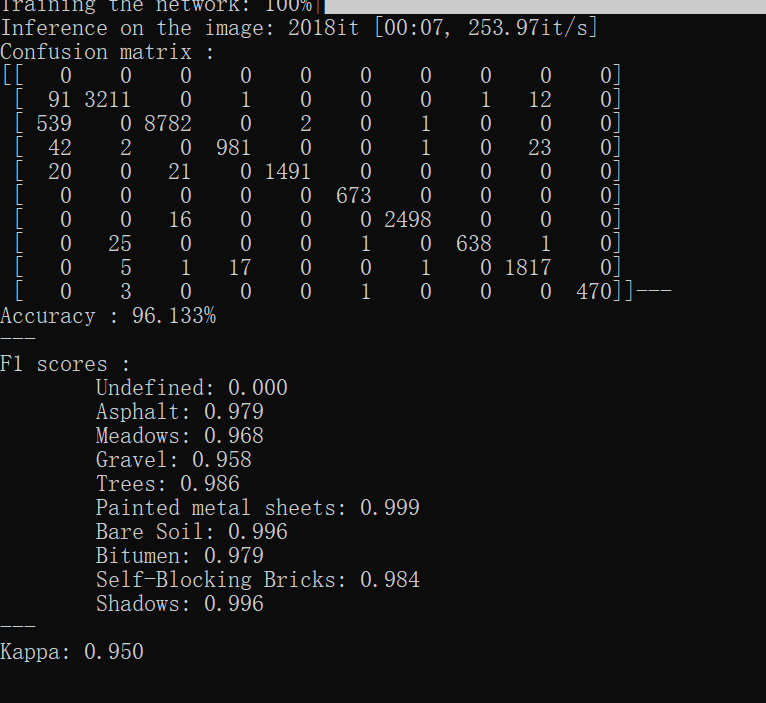
通过阅读代码发现和原论文中的结构并不完全相同,试着去修改了一层网络参数去接近原网络结构:
self.conv3 = nn.Conv3d(
35, 35, (3, 1, 1), dilation=dilation, stride=(1, 1, 1), padding=(1, 0, 0)
) ->> self.conv3 = nn.Conv3d(
35, 35, (3, 3, 3), dilation=dilation, stride=(1, 1, 1), padding=(1, 0, 0)
)
但发现最终效果不如上面结果,可能是对原论文提出的结构稍作改进了吧。
参考资料:
https://github.com/nshaud/DeepHyperX
https://blog.csdn.net/weixin_38481963/article/details/109906338
https://blog.csdn.net/abbcdc/article/details/123332063
https://wenku.baidu.com/view/fa899796f221dd36a32d7375a417866fb84ac087.html
DeepHyperX代码理解-HamidaEtAl的更多相关文章
- linux io的cfq代码理解
内核版本: 3.10内核. CFQ,即Completely Fair Queueing绝对公平调度器,原理是基于时间片的角度去保证公平,其实如果一台设备既有单队列,又有多队列,既有快速的NVME,又有 ...
- 通过汇编一个简单的C程序,分析汇编代码理解计算机是如何工作的
秦鼎涛 <Linux内核分析>MOOC课程http://mooc.study.163.com/course/USTC-1000029000 实验一 通过汇编一个简单的C程序,分析汇编代码 ...
- 『TensorFlow』通过代码理解gan网络_中
『cs231n』通过代码理解gan网络&tensorflow共享变量机制_上 上篇是一个尝试生成minist手写体数据的简单GAN网络,之前有介绍过,图片维度是28*28*1,生成器的上采样使 ...
- 通过反汇编一个简单的C程序,分析汇编代码理解计算机是如何工作的
实验一:通过反汇编一个简单的C程序,分析汇编代码理解计算机是如何工作的 学号:20135114 姓名:王朝宪 注: 原创作品转载请注明出处 <Linux内核分析>MOOC课程http: ...
- linux内核分析作业:以一简单C程序为例,分析汇编代码理解计算机如何工作
一.实验 使用gcc –S –o main.s main.c -m32 命令编译成汇编代码,如下代码中的数字请自行修改以防与他人雷同 int g(int x) { return x + 3; } in ...
- (原创)JS闭包看代码理解
<html xmlns="http://www.w3.org/1999/xhtml"> <head> <meta http-equiv="C ...
- junit4X系列源码--Junit4 Runner以及test case执行顺序和源代码理解
原文出处:http://www.cnblogs.com/caoyuanzhanlang/p/3534846.html.感谢作者的无私分享. 前一篇文章我们总体介绍了Junit4的用法以及一些简单的测试 ...
- java代码理解
public int maxProfit(int k, int[] prices) { int pl = prices.length; int nothin ...
- LearnOpenGL学习笔记(一)——现有代码理解
首先,给出这次学习的代码原网址.------>原作者的源代码 (黑体是源码,注释是写的.) 引用的库(预编译): #include <glad/glad.h> //控制编译时函数的具 ...
随机推荐
- 【Go语言】(一)环境搭建与了解VScode工具
视频链接(p1~p8): golang入门到项目实战 [2022最新Go语言教程,没有废话,纯干货!] 参考链接: 用vscode开发go的时候,安装go包报错:connectex: A connec ...
- 解决线程安全问题_同步方法和解决线程安全问题_Lock锁
解决线程安全问题_同步方法 package com.yang.Test.ThreadStudy; import lombok.SneakyThrows; /** * 卖票案例出现了线程安全的问题 * ...
- 记vs2019 The view 'xxx' was not found.
版本:Visual Studio 2019 16.8.2/16.8.4.net core 3.1 1.检测是否是拼写错误2.检查.csproj为文件中是否包含有下面的content remove(这种 ...
- mysql查询版本
系统环境下 :mysql -V; mysql内:select version();
- React报错之Property 'X' does not exist on type 'HTMLElement'
正文从这开始~ 总览 在React中,当我们试图访问类型为HTMLElement 的元素上不存在的属性时,就会发生Property 'X' does not exist on type 'HTMLEl ...
- Python 车主之家全系车型(包含历史停售车型)配置参数爬虫
本文仅供学习交流使用,如侵立删!demo下载见文末 车主之家全系车型(包含历史停售车型)配置参数爬虫 先上效果图 环境: win10 ,Contos7.4 python3.9.4 pycharm202 ...
- 技术分享 | Prometheus+Grafana监控MySQL浅析
GreatSQL社区原创内容未经授权不得随意使用,转载请联系小编并注明来源. 简介 Prometheus 一套开源的监控&报警&时间序列数据库的组合,通常 Kubernetes 中都会 ...
- Spring的简单使用(3)
一:SM框架的整合: 所需要的依赖: <dependency> <groupId>junit</groupId> <artifactId>junit&l ...
- Java开发学习(二十五)----使用PostMan完成不同类型参数传递
一.请求参数 请求路径设置好后,只要确保页面发送请求地址和后台Controller类中配置的路径一致,就可以接收到前端的请求,接收到请求后,如何接收页面传递的参数? 关于请求参数的传递与接收是和请求方 ...
- Python小游戏——外星人入侵(保姆级教程)第一章 03设置飞船图片 04创建Ship类
系列文章目录 第一章:武装飞船 03:设置飞船图片 04:创建Ship类--管理飞船行为的类 一.设置飞船图片 1.注意事项 A.将图片设置为位图bmp格式最简单,因为pygame默认加载位图 B.飞 ...