Rock18框架之整体框架介绍
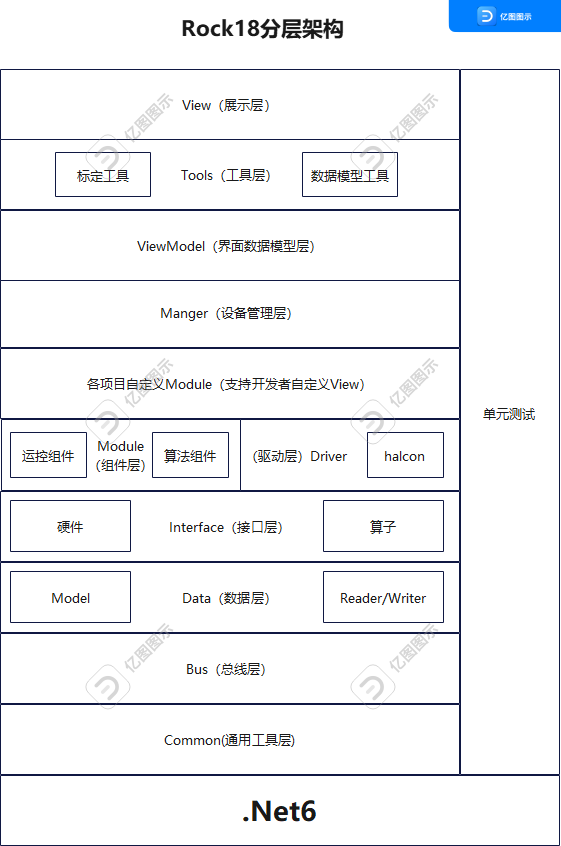
1. 总体框架图
2.框架能解决哪些问题?
问题1:
自动化设备包含龙门架、机械手、伺服、步进等电机、IO控制、定位及纠偏、界面展示等部分。其中硬件(伺服、IO等)是需要更换的,硬件的更换不影响整套系统,不影响指:逻辑无影响、代码无编辑。
解决思路:
1、面向接口编程,所有硬件及算法在业务逻辑层都是接口
2、接口自动依赖注入,所有接口通过manger层反射、注入方式实例化接口
3、变更硬件只新增对应接口实现即可,所有业务代码无需更改
问题2:
一台机器有很多通用的组件,如皮带、升降、翻转等,重复的逻辑太多,怎么减少重复逻辑?
解决办法:
1、组件化设计,把机器的皮带当成一个组件,升降为一个组件,一台机器是有N个独立组件构成,组件之间通过IO来交互(这部分思路参考一条整线有印刷机,贴片机、AOI等组成,机器之间通过IO来交互,机器内部也可以看做一条整线,由各个组件通过IO交互。只是交互是通过虚拟IO)
问题3:
组件抽象出来后,组件内部的编程模型怎么抽象,才能让编程更为简单方便?
解决办法:
有限状态机模型,组件内部定义为很多状态,每个状态下做指定的动作,满足条件后跳转到下一个状态。
3.案例
-下面是一个从升降台取载具到轨道上,然后从升降台取pcb放在载具上,最后流出的一个组件,里面包涵了下相机定位,载具定位,cpk扣合检测的组件代码(这是rock17框架下组件实现,rock18已引入状态机,后续博文会介绍基于状态机的组件编写)
/// <summary>
/// 开线模式,从升降台取夹具,从升降台取pcb,扣合流出
/// </summary>
public class OpenLineModule : BasePlantModule
{
private enum Status
{
UnKnow,
WaitTakeFix,
TakeFix,
WaitPutFix,
PutFix,
WaitTakePcb,
TakePcb,
WaitPutPcb,
PutPcb,
/// <summary>
/// 扣合检测是否开启
/// </summary>
CheckCpk
}
/// <summary>
/// 夹具吸嘴
/// </summary>
public ICylinder FixSuction { get; set; }
/// <summary>
/// 取光板位置
/// </summary>
public Position TakeFixPoi { get; set; }
public Position PutFixPoi { get; set; }
/// <summary>
/// 允许取夹具
/// </summary>
public IInputIoDevice AllowTakeFix { set; get; }
/// <summary>
/// 取夹具完成
/// </summary>
public IOutputIoDevice TakeFixCompelte { set; get; }
/// <summary>
/// 下位机要夹具
/// </summary>
public IInputIoDevice AllowPutFix { set; get; }
public IOutputIoDevice PutEmptyPcbCompelte { set; get; }
/// <summary>
/// 扩展轨道
/// </summary>
public ExtendTrackBaffleModule ExtendTrackBaffleModule { get; set; }
private Status RobotStatus = Status.UnKnow;
protected override void argsInit()
{
if (this.FixSuction.IsOpen())
{
throw new Exception(String.Format("{0} have object", this.FixSuction.GetName()));
}
this.RobotStatus = Status.UnKnow;
this.TakeFixCompelte.Close();
this.PutEmptyPcbCompelte.Close();
this.FixSuction.Close();
base.argsInit();
}
protected override void handler()
{
switch (this.RobotStatus)
{
case Status.UnKnow: this.unKnow(); break;
case Status.WaitTakeFix: this.waitTakeFix(); break;
case Status.TakeFix: this.takeFix(); break;
case Status.WaitPutFix: this.waitPutFix(); break;
case Status.PutFix: this.putFix(); break;
case Status.WaitTakePcb: this.waitTakePcb(); break;
case Status.TakePcb:
this.takePcb();
this.RobotStatus = Status.WaitPutPcb; break;
case Status.WaitPutPcb: this.waitPutPcb(); break;
case Status.PutPcb: this.putPcb(); break;
case Status.CheckCpk: this.checkCpk(); break;
default: break;
}
base.handler();
}
private void unKnow()
{
this.RobotStatus = Status.WaitTakeFix;
}
private void waitTakeFix()
{
if (this.AllowTakeFix.IsOpen())
{
this.RobotStatus = Status.TakeFix;
}
}
private void takeFix()
{
this.FixSuction.Open();
this.Robot.GoToPosition(this.TakeFixPoi);
this.Sleep(100);
//到达上方一点
Position tempFixPoi= this.TakeFixPoi.Copy();
tempFixPoi.Z += 10;
this.Robot.GoToPosition(tempFixPoi);
this.GotoPoiUp(this.Robot, this.TakeFixPoi);
this.checkSuctionNozzle(this.FixSuction);
this.TakeFixCompelte.Open();
this.Robot.GoToPosition(this.SafePoi);
this.RobotStatus = Status.WaitPutFix;
}
private void waitPutFix()
{
if (this.AllowPutFix.IsOpen())
{
this.RobotStatus = Status.PutFix;
}
}
private void putFix()
{
this.Robot.GoToPosition(this.PutFixPoi);
this.FixSuction.Close();
this.Sleep(200);
this.GotoPoiUp(this.Robot, this.PutFixPoi);
this.ExtendTrackBaffleModule.SetStatusA();
this.Robot.GoToPosition(this.SafePoi);
this.RobotStatus = Status.WaitTakePcb;
}
private void waitTakePcb()
{
if (this.AllowTakeEmptyPcb.IsOpen())
{
this.RobotStatus = Status.TakePcb;
}
}
private void waitPutPcb()
{
this.RobotStatus = Status.PutPcb;
}
private void putPcb()
{
if (this.AllowPutEmptyPcb.IsOpen())
{
this.fixEmptyPcb();
this.RobotStatus = Status.CheckCpk;
}
}
private void checkCpk()
{
//光板cpk
this.emptyPcbCpk();
//放板完成
this.PutEmptyPcbCompelte.Open();
this.Robot.GoToPosition(this.SafePoi);
//到安全点为了给翻转组件留时间
this.PutEmptyPcbCompelte.Close();
this.RobotStatus = Status.WaitTakeFix;
}
public override bool Dispose()
{
this.TakeFixCompelte.Close();
this.PutEmptyPcbCompelte.Close();
return base.Dispose();
}
}
}
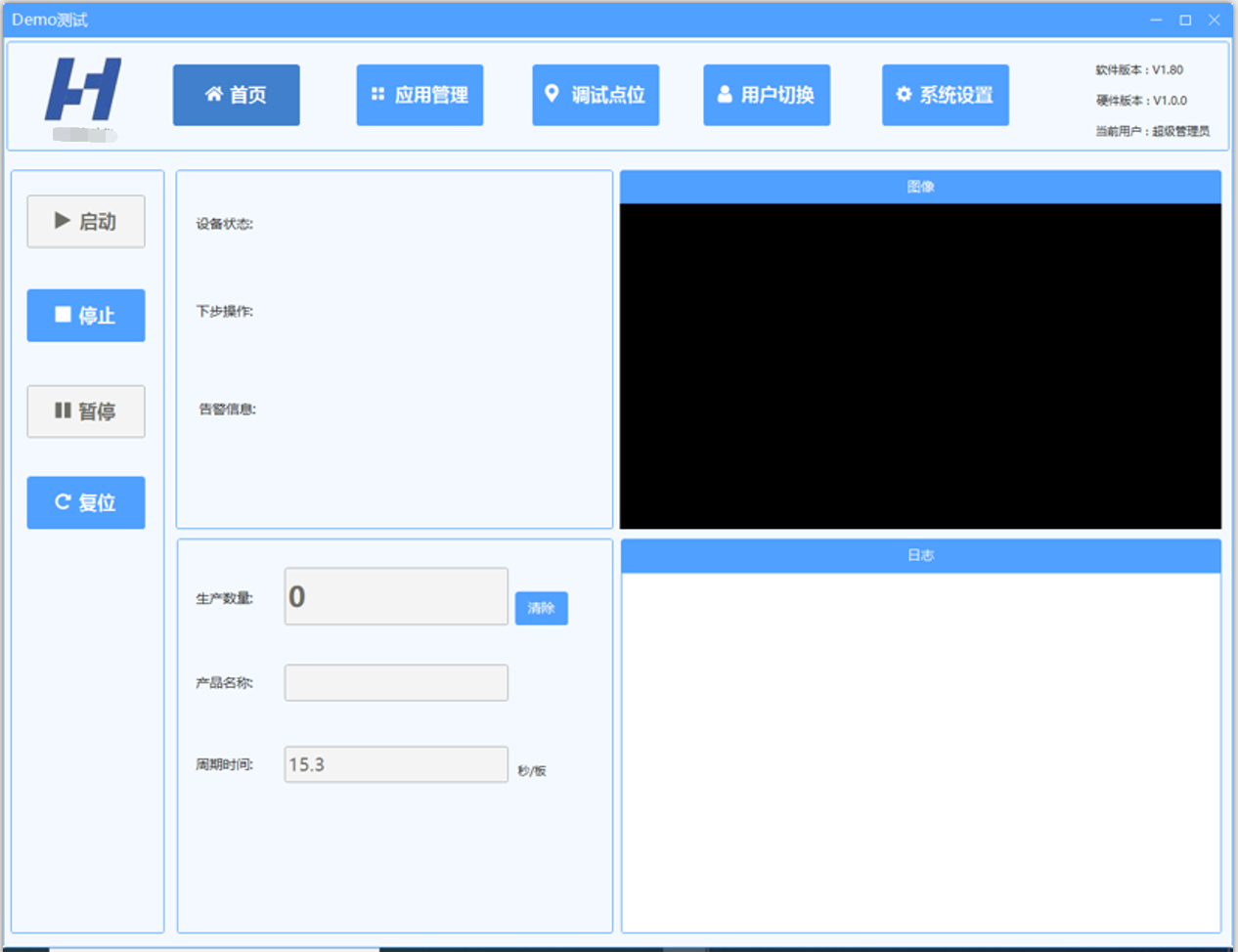
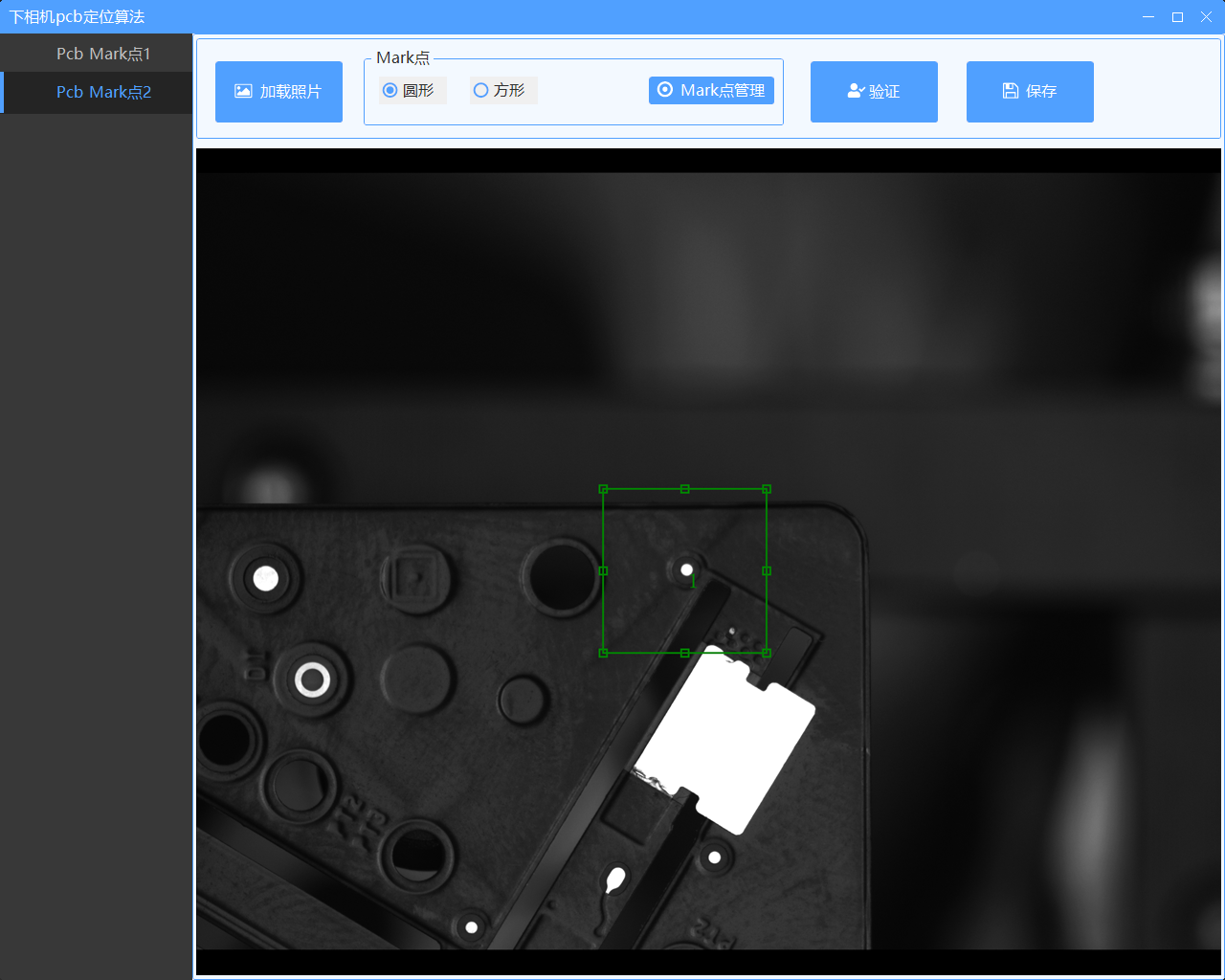
4.界面部分效果
主界面
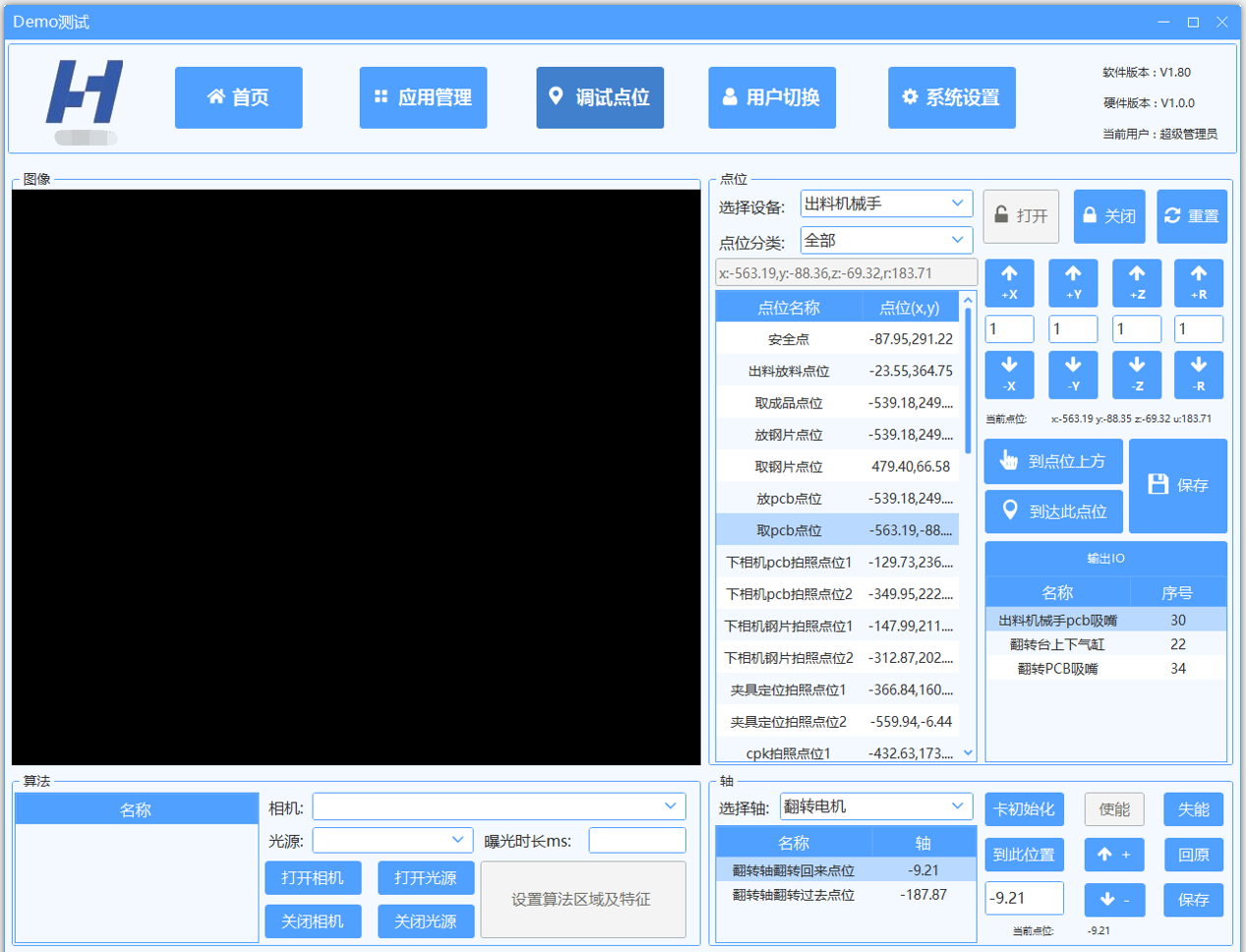
点位调试,算法,轴,io与点位联动
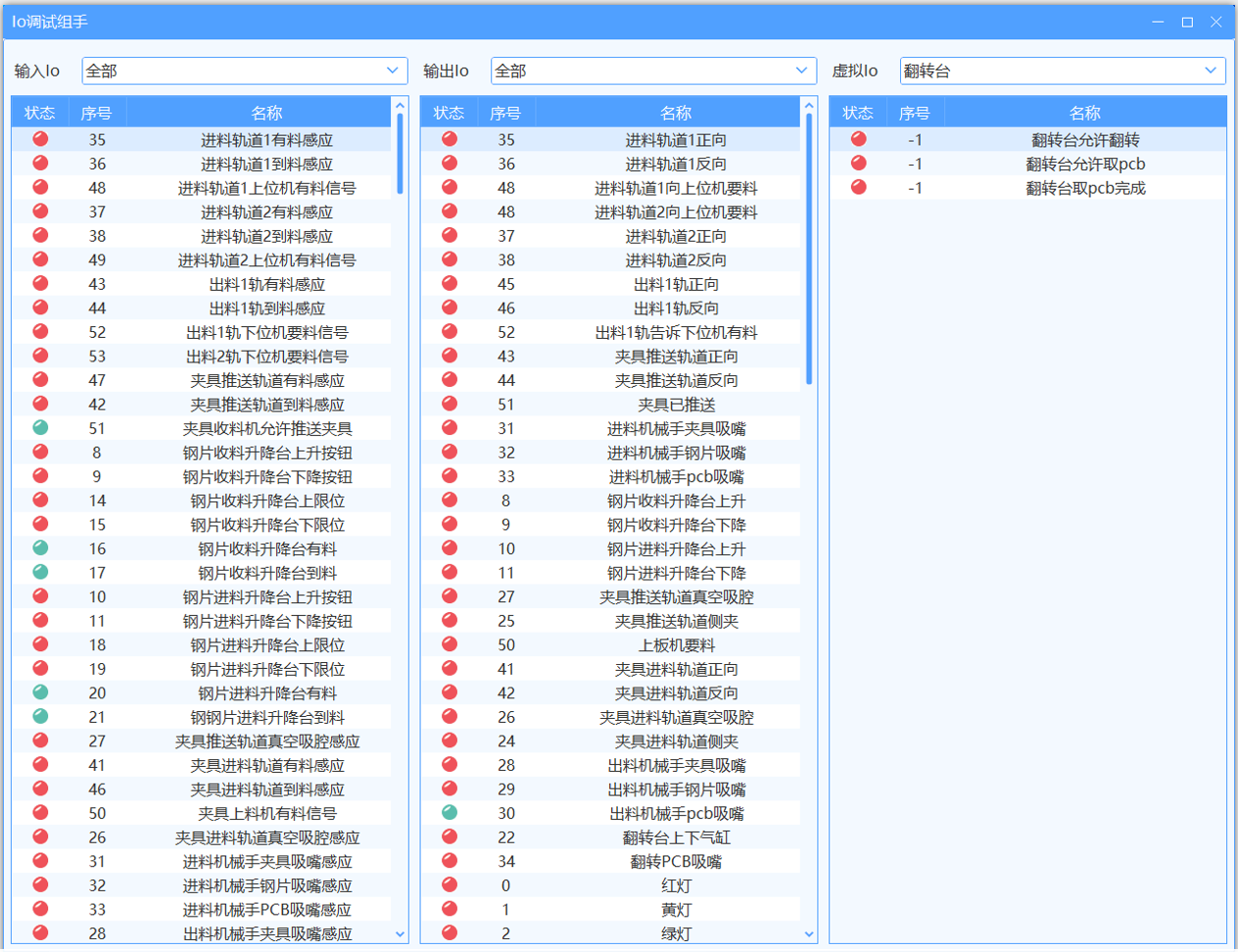
io助手
算法调试
5.后续计划
- 组件配置的编写逻辑与注入实现
- 基于状态机的组件编写
- 系统暂停继续实现逻辑
- 异常报警继续实现逻辑
- 算法交互部分实现(矩形框的拖拽,缩放,等比例获取区域等)
- 配置热更新实现
- 。。。
Rock18框架之整体框架介绍的更多相关文章
- go微服务框架go-micro深度学习(一) 整体架构介绍
产品嘴里的一个小项目,从立项到开发上线,随着时间和需求的不断激增,会越来越复杂,变成一个大项目,如果前期项目架构没设计的不好,代码会越来越臃肿,难以维护,后期的每次产品迭代上线都会牵一发而动全身.项目 ...
- Java 线程池(一):开篇及Executor整体框架介绍
一.开篇 线程池.数据库连接池,在平时的学习中总能接触到这两个词,但它们到底是什么?和线程,数据库连接有什么关系?为什么需要“池”?“池”的概念及作用是什么?要弄清楚这些问题,就要深入到“池”的实现中 ...
- Duilib源码分析(一)整体框架
Duilib界面库是一款由杭州月牙儿网络技术有限公司开发的界面开源库,以viksoe项目下的UiLib库的基础上开发(此后也将对UiLib库进行源码分析):通过XML布局界面,将用户界面和处理逻辑彻底 ...
- 基于Metronic的Bootstrap开发框架经验总结(8)--框架功能总体界面介绍
在前面介绍了一系列的<基于Metronic的Bootstrap开发框架经验总结>的随笔文章,随笔主要是介绍各个知识点的内容,对框架的总体性界面没有很好的阐述,本篇随笔主要介绍这个Boots ...
- iOS学习——iOS 整体框架及类继承框架图
整理自:IOS 整体框架类图值得收藏 一 整体框架 在iOS开发过程中,对iOS的整理框架的了解和学习是必不可少的一个环节,今天我们就好好来了解一下iOS的整体框架.首先贴一个关于iOS的框架介绍:i ...
- 关系型数据库工作原理-数据库整体框架(翻译自Coding-Geek文章)
本文翻译自Coding-Geek文章:< How does a relational database work>.原文链接:http://coding-geek.com/how-data ...
- Net分布式系统整体框架
Net分布式系统之一:系统整体框架介绍 一.设计目的 从事.Net平台开发系统已有8年多了,一直思考搭建.Net分布式系统架构.基于window平台搭建的大型分布式系统不多,之前了解过myspace. ...
- Spring Framework(框架)整体架构 变迁
Spring Framework(框架)整体架构 2018年04月24日 11:16:41 阅读数:1444 标签: Spring框架架构 更多 个人分类: Spring框架 版权声明:本文为博主 ...
- xmpp整理笔记:xmppFramework框架的导入和介绍
一个将要开发xmpp的项目,建议在项目刚创建就导入框架,这样可以避免一些自己操作失误造成不必要的损失. xmpp中最常用的框架就是 xmppFrameWork 往期回顾: xmpp整理笔记:环境的快速 ...
随机推荐
- (已解决)Adobe Creative Cloud 安装 Acrobat PDF 报错 DW071 DW003
今天安装 Adobe Acrobat pdf 阅读器报错了,错误为 Exit Code: 7 Please see specific errors below for troubleshooting. ...
- 概述:基于事件的优化方法 / 事件驱动优化 / Event-Based Optimization / EBO
大家好,我是月出 本文基于这篇综述,介绍了 事件驱动优化(Event-Based Optimization, EBO). 事件驱动优化,是一种建模现实场景.做优化的思路,理论和 MDP / 强化学习很 ...
- KingbaseFlySync V1R6 管控平台Linux命令行安装
关键字: KingbaseFlySync.KingbaseES.Linux.x86_64.mips64el.aarch64.Java 管控平台: Web管控平台(Manager.Console.Com ...
- alter role 导致的数据库无法登录问题
ALTER ROLE 用于更改一个数据库角色.只要改角色后续开始一个新会话,指定的值将会成为该会话的默认值,并且会覆盖 kingbase.conf中存在的值或者从命令行收到的值. 显性的更改角色的一 ...
- 安装docker及使用docker安装其他软件(手动挂载数据卷)
中秋明月,豪门有,贫家也有,极慰人心 Linux安装docker 可以参考官方的安装文档 centos安装docker: https://docs.docker.com/engine/install/ ...
- kettle通过SSH连接Mysql数据库(SSH隧道)
kettle通过SSH连接Mysql数据库(SSH隧道) Kettle无法直接连接使用SSH通道的MySQL,通过SSH隧道(推荐)或者需要借助工具PuTTY(不用时需要注销不推荐),具体操作如下所示 ...
- Hadoop阶段学习总结
第一部分:HDFS相关问题 一.描述一下HDFS的数据写入流程 首先由客户端想NameNode服务发起写数据请求,NameNode接收到请求后会进行基本验证,验证内容包括对请求上传的路径进行合法验 ...
- ES6中的箭头函数与普通函数的区别
箭头函数与普通函数的区别 1.语法上更加简洁.清晰 基本语法: // 关于箭头函数的参数 // 如果箭头函数没有参数,直接写一个括号即可 let fun1 = () => { console.l ...
- Elasticsearch中text与keyword的区别
text类型 1:支持分词,全文检索,支持模糊.精确查询,不支持聚合,排序操作; 2:test类型的最大支持的字符长度无限制,适合大字段存储: 使用场景: 存储全文搜索数据, 例如: 邮箱内容.地址. ...
- 监控告警之elastalert部署及配置全解
一.安装elastalert 1.环境 CentOS:7.4 Python:3.6.9 pip:19.3 elastalert:0.2.1 elk:7.3.2 2.配置Python3.6.9环境 安装 ...