Python实现改进后的Bi-RRT算法实例
Python实现改进后的Bi-RRT算法实例
1.背景说明
以下代码是参照上海交通大学海洋工程国家重点实验室《基于改进双向RRT的无人艇局部路径规划算法研究》的算法思想实现的。
2.算法流程
- 产生随机节点pi
- 寻找T1中距离p1最近的节点pn
- 以pn为父节点按原始步长向pi延伸得到虚新节点pa
- 确定距离pi最近的障碍物
- 使用动态步长策略计算实际步长sf
- 按照实际sf延伸得到实际节点新pw
- 障碍物检测 通过则进入步骤8 否则重回步骤1
- 转角约束检测 通过则进入步骤9 否则重回步骤1
- 将pw加入T1
- 在T2中寻找距离pw最近的节点pj
- 以pj为父节点按原始步长向pw延伸得到虚新节点pb
- 确定距离pb最近的障碍物
- 使用动态步长策略计算实际步长sf
- 按照实际sf延伸得到实际新节点px
- 障碍物检测 通过则进入步骤16 否则重回步骤1
- 转角约束检测 通过则进入步骤17 否则重回步骤1
- 将pw加入T2
- 检测是否满足相遇条件 是则进入步骤20 否则继续步骤1
- 检测是否满足平滑连接 是则结束搜索 否则继续步骤1
- 路径回溯
3.实际代码
"""
基于改进双向RRT算法的路径规划
"""
import matplotlib.pyplot as plt
from matplotlib.pyplot import MultipleLocator
import numpy as np
import math
import random
import copy
class Point(object):
"""
路径节点
"""
def __init__(self, x, y):
self.x = x
self.y = y
self.parent = None
class BiRRT(object):
"""
双向RRT算法实现
"""
def __init__(self, start, goal, angle, step, distance, obstacle_list, rand_area, safe, recover):
"""
初始化
:param start: 起点 [x,y]
:param goal: 终点 [x,y]
:param angle: 转向角 60
:param step: 基础步长 10
:param obstacle_list: 障碍物列表 [[x,y,radius]...]
:param rand_area: 区域大小
:param safe: 安全航迹结束点
:param recover: 安全航迹恢复点
"""
self.start = Point(start[0], start[1])
self.goal = Point(goal[0], goal[1])
self.angle = angle
self.step = step
self.distance = distance
self.obstacle_list = obstacle_list
self.min_rand = rand_area[0]
self.max_rand = rand_area[1]
self.goalSampleRate = 0.05
self.safe = Point(safe[0], safe[1])
self.recover = Point(recover[0], recover[1])
# 从起点开始搜索
self.point_list_from_start = [self.start]
begin = copy.deepcopy(self.safe)
begin.parent = 0
self.point_list_from_start.append(begin)
# 从终点开始搜索
self.point_list_from_goal = [self.goal]
begin = copy.deepcopy(self.recover)
begin.parent = 0
self.point_list_from_goal.append(begin)
def random_point(self):
"""
产生随机节点
:return:
"""
point_x = random.uniform(self.safe.x, self.recover.y)
point_y = random.uniform(self.safe.x, self.recover.y)
point = [point_x, point_y]
return point
@staticmethod
def get_nearest_list_index(point_list, rnd):
"""
在节点列表中找到距离目标节点中最近的点
:param point_list: 节点列表 T1 or obstacle_list
:param rnd: 目标节点
:return: 最近节点的位置
"""
d_list = [(point.x - rnd[0]) ** 2 + (point.y - rnd[1]) ** 2 for point in point_list]
min_index = d_list.index(min(d_list))
return min_index
def get_nearest_obstacle_index(self, point):
"""
找到距离point最近的障碍物
:param point: 节点
:return: 最近的障碍物
"""
d_list = [(math.sqrt((point.x - x) ** 2 + (point.y - y) ** 2)) - r for (x, y, r) in self.obstacle_list]
min_index = d_list.index(min(d_list))
return min_index
def collision_check(self, t, new_point, obstacle_list):
"""
检查新的节点是否会碰撞或穿越到障碍物
:param t: 树
:param new_point: 实际新节点
:param obstacle_list: 障碍物列表
:return:
"""
flag = 1
for (ox, oy, radius) in obstacle_list:
# 点到障碍物中心的距离
dx = ox - new_point.x
dy = oy - new_point.y
d = math.sqrt(dx * dx + dy * dy)
# 判断是否穿过障碍物
if t == 1:
parent_point = self.point_list_from_start[new_point.parent]
else:
parent_point = self.point_list_from_goal[new_point.parent]
vector_o = np.array([ox, oy])
vector_p = np.array([parent_point.x, parent_point.y])
vector_n = np.array([new_point.x, new_point.y])
d_p_n = np.abs(np.cross(vector_p - vector_o, vector_n - vector_o)) / np.linalg.norm(vector_p - vector_n)
# 如果点落在或穿过障碍物
if d < radius or d_p_n < radius:
flag = 0
return flag
return flag
def angle_check(self, new_point, parent_point, ancestor_point):
"""
转角约束
:param new_point: 新节点 w
:param parent_point: n节点(新节点的父级节点)
:param ancestor_point: f祖先节点
:return:
"""
vector_p_n = np.array([new_point.x - parent_point.x, new_point.y - parent_point.y])
vector_a_p = np.array([parent_point.x - ancestor_point.x, parent_point.y - ancestor_point.y])
angle = get_angle(vector_a_p, vector_p_n)
if angle <= self.angle:
return True
else:
return False
def dynamic_step(self, n_point, a_point):
"""
计算动态步长
:param n_point: 父节点
:param a_point: 虚新节点
:return: Sf 动态步长
"""
tan = math.atan2(a_point.y - n_point.y, a_point.x - n_point.x)
a_point.x += math.cos(tan) * (self.distance + self.step) / 2
a_point.y += math.sin(tan) * (self.distance + self.step) / 2
# 距离最近的障碍物
obstacle_min = self.obstacle_list[self.get_nearest_obstacle_index(a_point)]
# 虚拟节点a_point至障碍物边缘的距离l_a
l_a = math.sqrt((a_point.x - obstacle_min[0]) ** 2 + (a_point.y - obstacle_min[1]) ** 2) - obstacle_min[2]
# 生长点n_point至障碍物边缘的距离l_n
l_n = math.sqrt(np.square(n_point.x - obstacle_min[0]) + np.square(n_point.y - obstacle_min[1])) - obstacle_min[
2]
dynamic = self.step / (1 + (self.step / self.distance - 1) * math.exp(-3 * l_n / self.step))
return dynamic
def coordinate(self, t, rnd):
"""
实际坐标计算
:param t: 搜索树编号 1 2
:param rnd: 虚新节点
:return: 实际新节点
"""
# 在搜索树中找到距离rnd最近的节点
if t == 1:
min_index = self.get_nearest_list_index(self.point_list_from_start, rnd)
nearest_point = self.point_list_from_start[min_index]
elif t == 2:
min_index = self.get_nearest_list_index(self.point_list_from_goal, rnd)
nearest_point = self.point_list_from_goal[min_index]
# 按照原始步长计算坐标
theta = math.atan2(rnd[1] - nearest_point.y, rnd[0] - nearest_point.x)
new_point = copy.deepcopy(nearest_point)
new_point.x += math.cos(theta) * self.step
new_point.y += math.sin(theta) * self.step
new_point.parent = min_index
# 使用动态步长策略计算实际坐标
actual_step = self.dynamic_step(nearest_point, new_point)
new_point.x = nearest_point.x + math.cos(theta) * actual_step
new_point.y = nearest_point.y + math.sin(theta) * actual_step
return new_point, actual_step
def condition_check(self, t, new_point):
"""
限制条件检测
1.碰撞检测
2.转交约束检测
:param t: 搜索树
:param new_point: 实际新节点
:return: Boolean
"""
# 碰撞检测
if self.collision_check(t, new_point, self.obstacle_list):
if t == 1: # 搜索树1的转角约束检测
n_point = self.point_list_from_start[new_point.parent]
if n_point.parent is None:
return False
f_point = self.point_list_from_start[n_point.parent]
if self.angle_check(new_point, n_point, f_point):
return True
else:
return False
else: # 搜索树2的转角约束检测
n_point = self.point_list_from_goal[new_point.parent]
if n_point.parent is None:
return False
f_point = self.point_list_from_goal[n_point.parent]
if self.angle_check(new_point, n_point, f_point):
return True
else:
return False
else:
return False
def perfect_connect(self, one_point, two_point):
"""
计算是否满足平滑连接
:param one_point: 1号树的节点 w
:param two_point: 2号树的节点 x
:return:
"""
one_parent = self.point_list_from_start[one_point.parent] # n
two_parent = self.point_list_from_goal[two_point.parent] # j
vector_n_w = np.array([one_point.x - one_parent.x, one_point.y - one_parent.y])
vector_w_x = np.array([two_point.x - one_point.x, two_point.y - one_point.y])
vector_x_j = np.array([two_parent.x - two_point.x, two_parent.y - two_point.y])
angle_one = get_angle(vector_n_w, vector_w_x)
angle_two = get_angle(vector_w_x, vector_x_j)
if angle_one <= self.angle:
if angle_two == 180.0 or angle_one == 0.0:
return False
else:
print("phi: {0}, delta: {1}".format(angle_one, angle_two))
return True
else:
return False
def generate_path_list(self):
"""
路径回溯
:return: list
"""
path = []
path_1 = []
path_2 = []
last_index = len(self.point_list_from_start) - 1
while self.point_list_from_start[last_index].parent is not None:
point = self.point_list_from_start[last_index]
path.append([point.x, point.y])
path_1.append([point.x, point.y])
last_index = point.parent
path.append([self.start.x, self.start.y])
path_1.append([self.start.x, self.start.y])
path = path[::-1]
last_index = len(self.point_list_from_goal) - 1
while self.point_list_from_goal[last_index].parent is not None:
point = self.point_list_from_goal[last_index]
path.append([point.x, point.y])
path_2.append([point.x, point.y])
last_index = point.parent
path.append([self.goal.x, self.goal.y])
path_2.append([self.goal.x, self.goal.y])
print("最终规划路径:", path)
print("搜索树1:", path_1)
print("搜索树2:", path_2)
return path, path_1, path_2
def planning(self):
"""
路径规划算法的具体实现
流程:
1.产生随机节点pi
2.寻找T1中距离p1最近的节点pn
3.以pn为父节点按原始步长向pi延伸得到虚新节点pa
4.确定距离pi最近的障碍物
5.使用动态步长策略计算实际步长sf
6.按照实际sf延伸得到实际节点新pw
7.障碍物检测 通过则进入步骤8 否则重回步骤1
8.转角约束检测 通过则进入步骤9 否则重回步骤1
9.将pw加入T1
10.在T2中寻找距离pw最近的节点pj
11.以pj为父节点按原始步长向pw延伸得到虚新节点pb
12.确定距离pb最近的障碍物
13.使用动态步长策略计算实际步长sf
14.按照实际sf延伸得到实际新节点px
15.障碍物检测 通过则进入步骤16 否则重回步骤1
16.转角约束检测 通过则进入步骤17 否则重回步骤1
18.将pw加入T2
19.检测是否满足相遇条件 是则进入步骤20 否则继续步骤1
20.检测是否满足平滑连接 是则结束搜索 否则继续步骤1
21.路径回溯
:return: [[x, y]]
"""
# 路径搜索
while True:
"""
搜索树1的实现
"""
# T1产生随机节点
if random.random() > self.goalSampleRate:
rnd = self.random_point()
else:
rnd = [self.goal.x, self.goal.y]
# 计算后的实际新节点和动态步长
new_point, actual_step = self.coordinate(1, rnd)
# 限制条件检测
if not self.condition_check(1, new_point):
continue
# 实际新节点通过检测 加入T1
self.point_list_from_start.append(new_point)
"""
搜索树2的实现
"""
# 实际新节点
new_point_two, actual_step = self.coordinate(2, [new_point.x, new_point.y])
# 限制条件检测
if not self.condition_check(2, new_point_two):
continue
# 实际新节点加入 T2
self.point_list_from_goal.append(new_point_two)
"""
判断是否达到目标点
"""
# 判断是否满足相遇条件
dx = new_point.x - new_point_two.x
dy = new_point.y - new_point_two.y
d = math.sqrt(dx * dx + dy * dy)
if self.distance < d < self.step:
if self.perfect_connect(new_point, new_point_two):
break
else:
continue
else:
continue
return self.generate_path_list()
def draw_statistic(self, path):
"""
绘制静态图像
:param path: 规划完成的路径
:return:
"""
plt.clf()
# 绘制区域
# x轴刻度区间
x_major_location = MultipleLocator(10)
# y轴刻度区间
y_major_location = MultipleLocator(10)
# 坐标轴实例
ax = plt.gca()
ax.xaxis.set_major_locator(x_major_location)
ax.yaxis.set_major_locator(y_major_location)
plt.axis([self.min_rand, self.max_rand, self.min_rand, self.max_rand])
# 绘制障碍物
for (ox, oy, radius) in self.obstacle_list:
circle = plt.Circle(xy=(ox, oy), radius=radius, color="r")
ax.add_patch(circle)
# 绘制起点
plt.plot(self.start.x, self.start.y, "^g")
# 绘制终点
plt.plot(self.goal.x, self.goal.y, "^b")
# 绘制规划的路径
plt.plot([data[0] for data in path], [data[1] for data in path], "-y")
for (x, y) in path:
plt.scatter(x, y, marker='o', c='b', edgecolors='b')
ax.set_aspect('equal', adjustable='datalim')
ax.plot()
plt.grid(True)
plt.show()
def get_angle(a, b):
"""
向量夹角计算
:param a:
:param b:
:return:
"""
a_norm = np.sqrt(np.sum(a * a))
b_norm = np.sqrt(np.sum(b * b))
cos_value = float(np.dot(a, b) / (a_norm * b_norm))
eps = 1e-6
if 1.0 < cos_value < 1.0 + eps:
cos_value = 1.0
elif -1.0 - eps < cos_value < -1.0:
cos_value = -1.0
arc_value = np.arccos(cos_value)
angle_value = arc_value * (180 / np.pi)
return angle_value
def get_total_distance(path):
"""
计算路径总长度
:param path:
:return:
"""
total_distance = 0
for index in range(2, len(path)-1):
one = path[index-1]
two = path[index]
total_distance += np.sqrt(np.square(two[0] - one[0]) + np.square(two[1] - one[0]))
print(total_distance)
def main():
print("============================Start planning your path============================")
rand_area = [0, 100] # 区域大小
step = 10 # 基础步长
angle = 60 # 最大转向角
distance = 5 # 最小航行距离
start = [0, 0] # 起点
goal = [100, 100] # 终点
safe = [20, 20]
recover = [90, 90]
# 障碍物
obstacle_list = [
(50, 50, 15),
(62, 13, 12),
(50, 87, 11)
]
bi_rrt = BiRRT(start=start, goal=goal, angle=angle, step=step, distance=distance, obstacle_list=obstacle_list,
rand_area=rand_area, safe=safe, recover=recover)
path, path_1, path_2 = bi_rrt.planning()
bi_rrt.draw_statistic(path)
get_total_distance(path)
print("==========================End of planned path==========================")
if __name__ == '__main__':
main()
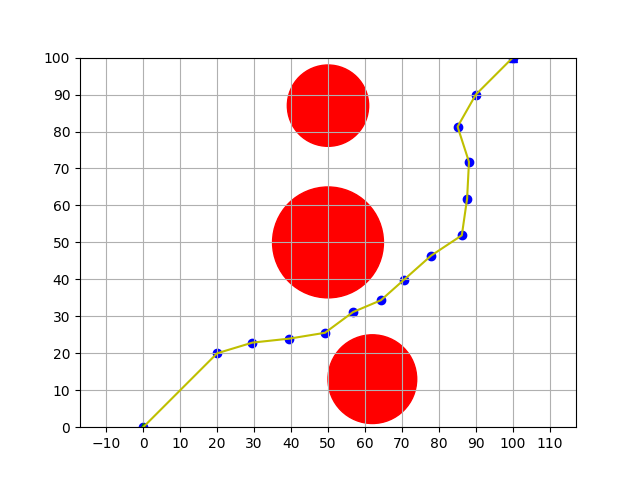
4. 效果图
Python实现改进后的Bi-RRT算法实例的更多相关文章
- 机器学习经典算法具体解释及Python实现--线性回归(Linear Regression)算法
(一)认识回归 回归是统计学中最有力的工具之中的一个. 机器学习监督学习算法分为分类算法和回归算法两种,事实上就是依据类别标签分布类型为离散型.连续性而定义的. 顾名思义.分类算法用于离散型分布预測, ...
- python安装完毕后,提示找不到ssl模块的解决步骤
转载自 醇酒醉影 python安装完毕后,提示找不到ssl模块: [root@localhost ~]# python2.7.5 Python 2.7.5 (default, Jun 3 2013, ...
- python安装完毕后,提示找不到ssl模块的解决方示
python安装完毕后,提示找不到ssl模块: [root@localhost ~]# python2.7.5 Python 2.7.5 (default, Jun 3 2013, 11:08:43) ...
- python插入记录后获取最后一条数据的id
python插入记录后取得主键id的方法(cursor.lastrowid和conn.insert_id()) 参考:https://blog.csdn.net/qq_37788558/article ...
- jenkins结合supervisor进行python程序发布后的自动重启
jenkins结合supervisor进行python程序发布后的自动重启 项目背景: 通过jenkins发布kvaccount.chinasoft.com站点的python服务端程序,业务部门同事需 ...
- python执行系统命令后获取返回值的几种方式集合
python执行系统命令后获取返回值的几种方式集合 今天小编就为大家分享一篇python执行系统命令后获取返回值的几种方式集合,具有很好的参考价值,希望对大家有所帮助.一起跟随小编过来看看吧 第一种情 ...
- Python实现的计算马氏距离算法示例
Python实现的计算马氏距离算法示例 本文实例讲述了Python实现的计算马氏距离算法.分享给大家供大家参考,具体如下: 我给写成函数调用了 python实现马氏距离源代码: # encod ...
- python安装OpenCV后import cv2报错解决办法
现在python安装完成后,运行pip install opencv-python安装成功后,import cv2时会失败 看到有人给出下载https://www.lfd.uci.edu/~gohlk ...
- Python环境搭建后,多种方式的使用进行程序的执行。
Python环境搭建后,可以使用多种方式进行程序的执行. 第一种: 进入CMD命令提示符 输入python 进入python环境(可以使用Ctrl+C退出) 输入print("hello&q ...
随机推荐
- 小C的记事本_via牛客网
题目 链接:https://ac.nowcoder.com/acm/contest/28537/G 来源:牛客网 时间限制:C/C++ 2秒,其他语言4秒 空间限制:C/C++ 131072K,其他语 ...
- [NOIP2015 提高组] 运输计划题解
题目链接:P2680 [NOIP2015 提高组] 运输计划 - 洛谷 | 计算机科学教育新生态 (luogu.com.cn) 看了好长时间题解才终于懂的,有关lca和二分答案的题解解释的不详细,一时 ...
- 聊聊如何用 Redis 实现分布式锁?
作者:小林coding 计算机八股文网站:https://xiaolincoding.com 哈喽,我是小林. 今天跟大家聊聊两个问题: 如何用 Redis 实现分布式锁? Redis 是如何解决集群 ...
- 实践GoF的23种设计模式:观察者模式
摘要:当你需要监听某个状态的变更,且在状态变更时通知到监听者,用观察者模式吧. 本文分享自华为云社区<[Go实现]实践GoF的23种设计模式:观察者模式>,作者: 元闰子 . 简介 现在有 ...
- Odoo14 ir.rule 中的domain查询语句
# ir.rule 中的domain查询语句 # 当你的字段是many2one.many2many.one2many的时候domain都会强制加上过滤域 # tree显示的时候也会过滤 # m.mod ...
- 附加进程 到远程服务器中Docker容器内 调试
很多时候,我们在本地开发过程中程序运行很正常,但是发布到线上之后由于环境的原因,可能会有一些异常.通常我们会通过日志来分析问题,除了日志还有一种常用的调试手段就是:附加进程. VS中的附加进程非常强大 ...
- 快速体验Spring Boot了解使用、运行和打包 | SpringBoot 2.7.2学习系列
SpringBoot 2.7.2 学习系列,本节内容快速体验Spring Boot,带大家了解它的基本使用.运行和打包. Spring Boot 基于 Spring 框架,底层离不开 IoC.AoP ...
- Chapter 02 - Let's Get Started(C#篇)
详细解释,书上有哈.直接上代码和结果. Xcode下的自定义类 (通过new file-> cocoa class创建,保持和书中名字一样RandomController),自定义的fields ...
- mybatis 05: mybatis中的动态代理
mybatis中动态代理存在的意义 图示 图示分析 分层说明:界面层为第一层,业务逻辑层(接口层 + 实现层)为第二层,数据访问层(接口层 + 实现层)为第三层 业务逻辑层和数据访问层:分别分两层来开 ...
- java学习第一天.day04
顺序结构 代码里没有流程控制,程序是按照书写的格式从上而下一行一行执行的, 一条语句执行完之后继续执行下一条语句,中间没有判断和跳转,直到程序的结束. 选择结构 选择结构也被称为分支结构.代码根据逻辑 ...