基于 HTML5 和 Canvas 实现的 3D 垃圾分类系统
前言
垃圾分类,一般是指按一定规定或标准将垃圾分类储存、分类投放和分类搬运,从而转变成公共资源的一系列活动的总称。分类的目的是提高垃圾的资源价值和经济价值,力争物尽其用。垃圾在分类储存阶段属于公众的私有品,垃圾经公众分类投放后成为公众所在小区或社区的区域性准公共资源,垃圾分类搬运到垃圾集中点或转运站后成为没有排除性的公共资源。从国内外各城市对生活垃圾分类的方法来看,大致都是根据垃圾的成分、产生量,结合本地垃圾的资源利用和处理方式来进行分类的。到2019年6月25日,生活垃圾分类制度将入法。一套应用于工业物联网的智能一体化的垃圾分类机械臂将随之而来,由此,我应用 HT for Web 的图型化编辑工具打造了一款形象生动的例子:Garbage classification,也借此机会与大家一起分享和学习。
代码实现
(注:gif 的上传大小有限,实际效果与还请参考 demo 链接)
首先,我应用已经精心布置好的 3D 场景,为了有更好的操作体验感,我们要从它的基本设置开始:

gv.setMovableFunc(() => { return false }) // 禁止拖动
gv.getWireframe = (d) => { d.s('wf.visible', false) } // 隐藏选中边框
gv.setEye([583, -212, -789]) // 设置眼睛
gv.setCenter([-76, -654, -133]) // 设置中心点
gv.setFar(100000) // 设置远端位置
gv.setNear(10) // 设置近端位置
gv.setInteractors([ new ht.graph3d.MapInteractor(gv) ]) // 设置交互限制
gv.setSkyBox(dm.getDataByTag('skyBox')) // 设置天空球
window.document.oncontextmenu = () => { return false } // 全局设置右键菜单禁用
gv.scene = { // 复制初始位置
eye: ht.Default.clone(gv.getEye()),
center: ht.Default.clone(gv.getCenter()),
far: ht.Default.clone(gv.getFar()),
near: ht.Default.clone(gv.getNear()),
}
我复制了一下整个场景的初始视角情况方便我做稍后的处理,我监听了部分鼠标事件来形成自己的操作风格(比如双击背景还原视角以及双击模型拉近视角):
gv.mi(e => {
let data = e.data
let kind = e.kind
if (kind === 'doubleClickBackground') { // 双击背景
gv.moveCamera(this.gv.scene.eye, this.gv.scene.center, {duration : 1000}) // 恢复视角
}
else if (kind === 'doubleClickData') { // 双击模型
gv.flyTo(data, {animation : {duration : 500}, distance : 800}) // 拉近视角
}
})
好了,准备工作做好了,下面来实现动画部分,除了了解 垃圾分类 的方式外我还参考了网上很多机械臂的视频,学习它的运动模式和动作细节,对每个结构和部位的动画进行步骤的排序和构思。这里我挑选几处动画的实现方式来展示:
function mechanicalArmAnim1() {
ht.Default.startAnim({
duration: 1000,
easing: (t) => { return t },
action: (v, t) => {
postbrachium.r3(degrees(0) + (degrees(20) - degrees(0)) * v, postbrachium.r3()[1], postbrachium.r3()[2]) // 后臂向下移
},
finishFunc: () => {
setTimeout(() => {
mechanicalArmAnim2()
}, 300)
}
})
}
function mechanicalArmAnim2() {
ht.Default.startAnim({
duration: 1000,
easing: (t) => { return t },
action: (v, t) => {
postbrachium.p3(-208 + (-184 + 208) * v, postbrachium.p3()[1], postbrachium.p3()[2]) // 后臂前伸
hydraulicRod1.r3(degrees(0) + (degrees(8) - degrees(0)) * v, hydraulicRod1.r3()[1], hydraulicRod1.r3()[2]) // 液压杆1倾斜
extensionRod1.r3(degrees(0) + (degrees(8) - degrees(0)) * v, extensionRod1.r3()[1], extensionRod1.r3()[2]) // 伸长杆1倾斜
extensionRod1.p3(-169 + (-185 + 169) * v, -516 + (-511 + 516) * v, extensionRod1.p3()[2]) // 伸长杆1伸长
hydraulicRod2.r3(degrees(0) + (degrees(-8) - degrees(0)) * v, hydraulicRod2.r3()[1], hydraulicRod2.r3()[2]) // 液压杆2倾斜
extensionRod2.r3(degrees(0) + (degrees(-8) - degrees(0)) * v, extensionRod2.r3()[1], extensionRod2.r3()[2]) // 伸长杆2倾斜
extensionRod2.p3(-169 + (-185 + 169) * v, -516 + (-511 + 516) * v, extensionRod2.p3()[2]) // 伸长杆2伸长
},
finishFunc: () => {
setTimeout(() => {
mechanicalArmAnim3()
}, 300)
}
})
}
function mechanicalArmAnim3() {
let oldValue = antebrachium.r3()[0]
ht.Default.startAnim({
duration: 1000,
easing: (t) => { return t },
action: (v, t) => {
hydraulicRod1.r3(degrees(8) + (degrees(7) - degrees(8)) * v, hydraulicRod1.r3()[1], hydraulicRod1.r3()[2]) // 液压杆1倾斜
extensionRod1.r3(degrees(8) + (degrees(7) - degrees(8)) * v, extensionRod1.r3()[1], extensionRod1.r3()[2]) // 伸长杆1倾斜
extensionRod1.p3(-185 + (-186 + 185) * v, -511 + (-507 + 511) * v, extensionRod1.p3()[2]) // 伸长杆1伸长
hydraulicRod2.r3(degrees(-8) + (degrees(-7) - degrees(-8)) * v, hydraulicRod2.r3()[1], hydraulicRod2.r3()[2]) // 液压杆2倾斜
extensionRod2.r3(degrees(-8) + (degrees(-7) - degrees(-8)) * v, extensionRod2.r3()[1], extensionRod2.r3()[2]) // 伸长杆2倾斜
extensionRod2.p3(-185 + (-186 + 185) * v, -511 + (-507 + 511) * v, extensionRod2.p3()[2]) // 伸长杆2伸长
postbrachium.r3(degrees(20) + (degrees(25) - degrees(20)) * v, postbrachium.r3()[1], postbrachium.r3()[2]) // 后臂向下移
antebrachium.r3(oldValue + (degrees(-40) - oldValue) * v, antebrachium.r3()[1], antebrachium.r3()[2]) // 前臂向下移
claw1.r3(degrees(-20) + (degrees(-60) - degrees(-20)) * v, claw1.r3()[1], claw1.r3()[2]) // 上爪抓取
claw2.r3(degrees(-60) + (degrees(-30) - degrees(-60)) * v, claw2.r3()[1], claw2.r3()[2]) // 下爪抓取
},
finishFunc: () => {
mechanicalArmAnim4()
}
})
}
这一段动画是机械臂从初始化状态到向下抓取的一个过程,我将每段动画分成函数来写比较方便后续管理,每一处也代表了一个步骤。这其中最复杂且细微的步骤要数液压杆的运动了,为了让动画看起来更加真实,我除了将手臂单独运动的过程中加入了延时执行下一段动画以体现机器运动的特点外,也把液压杆的部分也做了动画,如果不做处理,那么机械臂在上下移动的时候就会有不科学的效果出现。动画函数 在这种 demo 中应用的最广,而且里面也包含了一些缓动函数,有兴趣的博友们可以 点此处 自己亲自动手玩一玩~
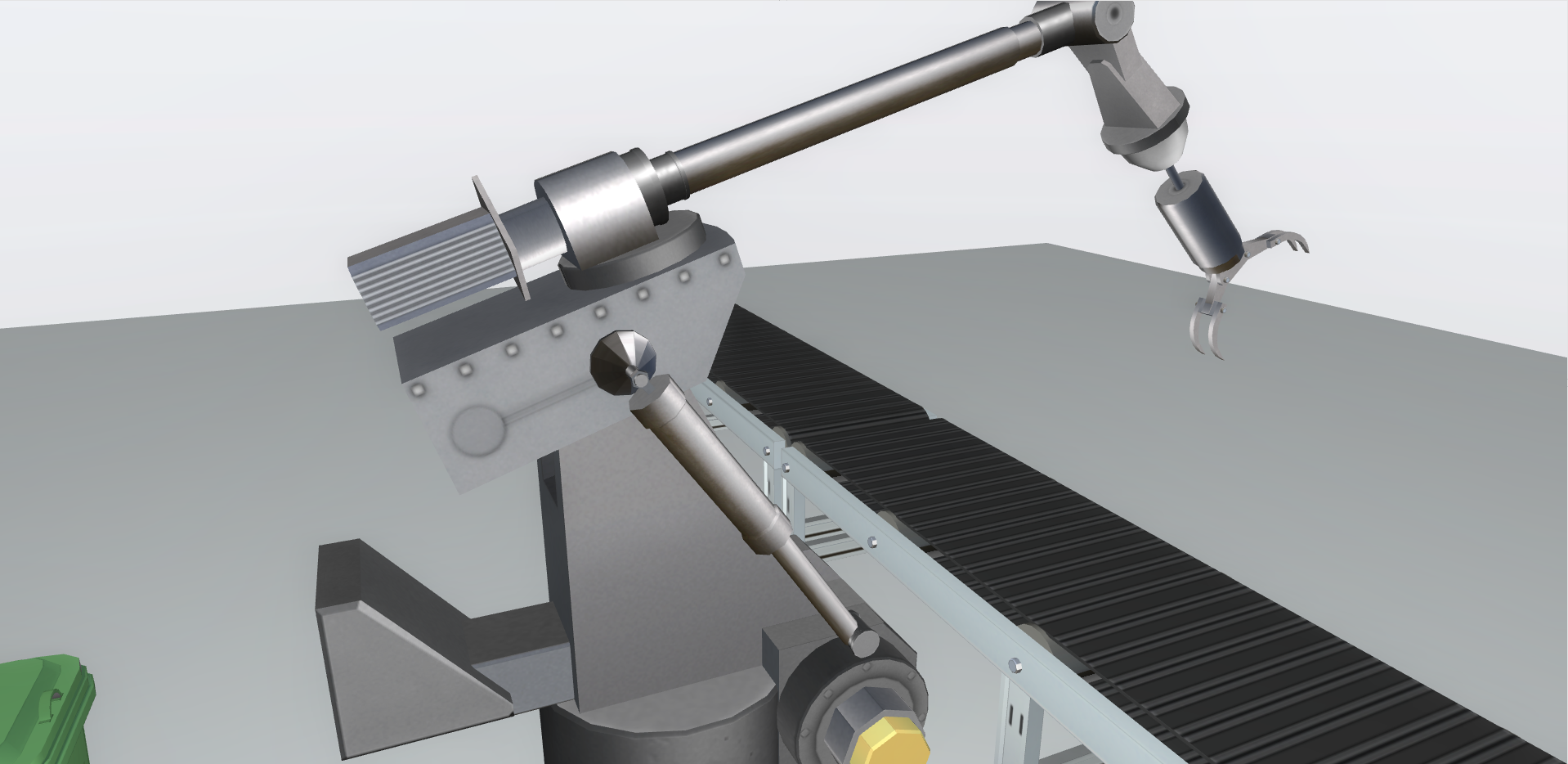
这里面的拾取垃圾步骤还应用了我过去介绍过的 吸附 功能,这个方法非常的适合抓取物体的动作,通过 setHost 使节点吸附于宿主,这样就相当于子节点跟随父节点移动,此时只需要对机械臂进行偏移和旋转的操作,垃圾便会随之一起运动了,大大减少了工作量!
还有一部分更酷的属性设置给大家展示一下,可以让 3D 场景整体有更真实的阴影处理效果。首先我们要注意将无关的节点阴影通过 node.s('shadow.cast', false) 关闭,比如编组用的box,背景,地板和面板等。
最后我们就把阴影的细节做下调整,达到比较好的效果:
gv.enableShadow(true, {
degreeX : 0, // 投影 x 轴角度
degreeZ : -25, // 投影 z 轴角度
intensity : 0.3, // 阴影强度, 1 为黑色
quality : 'high', // low / medium / high / ultra / 4096数值, 质量
type : 'soft', // none / hard / soft
radius : 0.2, // type 为 hard / soft 时,补充的边缘厚度,用来提供更柔和的边缘
bias : -0.003 // 深度浮点偏差补足
})
总结
更多动画 demo 以及工业化领域的文章请继续关注我的博客,感谢大家的支持!
医疗站(https://www.cnblogs.com/htdaydayup/p/11558748.html)
在工业物联网从婴儿走到青年的成熟道路上,一定会有更多的潜力和挑战在等着我们,等待我们去开发,等待我们去创造!相信我们的技术成为国际水准会指日可待!同时在十一国庆后的第一个工作日祝大家精神饱满,工作顺利!
基于 HTML5 和 Canvas 实现的 3D 垃圾分类系统的更多相关文章
- 基于 HTML5 和 WebGL 的地铁站 3D 可视化系统
前言 工业互联网,物联网,可视化等名词在我们现在信息化的大背景下已经是耳熟能详,日常生活的交通,出行,吃穿等可能都可以用信息化的方式来为我们表达,在传统的可视化监控领域,一般都是基于 Web SCAD ...
- 基于 HTML5 + WebGL 的宇宙(太阳系) 3D 可视化系统
前言 近年来随着引力波的发现.黑洞照片的拍摄.火星上存在水的证据发现等科学上的突破,以及文学影视作品中诸如<三体>.<流浪地球>.<星际穿越>等的传播普及,宇宙空间 ...
- 基于 HTML5 的 WebGL 楼宇自控 3D 可视化监控
前言 智慧楼宇和人们的生活息息相关,楼宇智能化程度的提高,会极大程度的改善人们的生活品质,在当前工业互联网大背景下受到很大关注.目前智慧楼宇可视化监控的主要优点包括: 智慧化 -- 智慧楼宇是一个生态 ...
- 基于HTML5的WebGL电信网管3D机房监控应用
先上段视频,不是在玩游戏哦,是规规矩矩的电信网管企业应用,嗯,全键盘的漫游3D机房: http://www.hightopo.com/guide/guide/core/3d/examples/exam ...
- 9款基于HTML5/SVG/Canvas的折线图表应用
1.华丽的HTML5图表 可展示实时数据 HTML5在图表应用中也十分广泛,比起以前的网页图表,HTML5图表制作更便捷,功能更强大.这款HTML5图表插件外观十分华丽和专业,在数据展示方面也很有优势 ...
- 基于 H5 + WebGL 实现的地铁站 3D 可视化系统
前言 工业互联网,物联网,可视化等名词在我们现在信息化的大背景下已经是耳熟能详,日常生活的交通,出行,吃穿等可能都可以用信息化的方式来为我们表达,在传统的可视化监控领域,一般都是基于 Web SCAD ...
- 基于 HTML5 的 WebGL 技术构建 3D 场景(一)
今天和大家分享的是 3D 系列之 3D 预定义模型. HT for Web 提供了多种基础类型供用户建模使用,不同于传统的 3D 建模方式,HT 的建模核心都是基于 API 的接口方式,通过 HT 预 ...
- 基于 HTML5 WebGL 构建智能城市 3D 场景
前言 随着城市规模的扩大,传统的方式很难彻底地展示城市的全貌,但随着 3D 技术的应用,出现了 3D 城市群的方式以动态,交互式地把城市全貌呈现出来.配合智能城市系统,通过 Web 可视化的方式,使得 ...
- 基于 HTML5 的工业组态高炉炼铁 3D 大屏可视化
前言 在大数据盛行的现在,大屏数据可视化也已经成为了一个热门的话题.大屏可视化可以运用在众多领域中,比如工业互联网.医疗.交通.工业控制等等.将各项重要指标数据以图表.各种图形等形式表现在一个页面上, ...
随机推荐
- [UVA1494] Qin Shi Huang's National Road System
题目 戳这里 题解 从今天起我要改邪归正,好好刷题准备联赛! 这是一道经典的最小生成树题目. 枚举每一条边作为道士要修的路,求出包含这条边的最小生成树. 先求出原图的最小生成树. 如果要删的边在最小生 ...
- 《爬虫学习》(四)(使用lxml,bs4库以及正则表达式解析数据)
1.XPath: XPath(XML Path Language)是一门在XML和HTML文档中查找信息的语言,可用来在XML和HTML文档中对元素和属性进行遍历. 工具:扩展商店里搜索:XPath ...
- BZOJ 1770 lights燈
题目传送门 分析: 跑着去学了一波异或方程组高斯消元 (全世界就我不知道系列..) 然后我们可以列方程组诶 (a[1][x]&x[1])^(a[2][x]&x[2])^...^(a[n ...
- Client API Object Model - Execution Context
1. executionContext. executionContext定义代码在其中执行的上下文. 并且适用在再form或者grid中的event handler. 比如formContext 或 ...
- layui数据表格及分页
一.前端部分 html只需要放一个有id的div就行了,方便js获取渲染区域 <div id="data_grid" lay-filter="demo" ...
- CAD制图系列之椭圆画法标注
今天我将做一个极轴是92,150的椭圆画法和标注方法 1.打开2014版本CAD制图,快捷键EL,回车: 2.自己随便定一个点 3.输入第一个值,也就是短轴--横轴(输入实际长度,不需要除以二)并且鼠 ...
- 批量解析域名为IP地址的python脚本
脚本如下: #!/usr/bin/env python #coding:utf- import os,sys from socket import gethostbyname DOMAIN= &quo ...
- Visual Studio 2012 出现关于ActivityLog.xml错误的解决方案
由sp1升级sp2后出现的错误. devenv.exe /safemode启动下,就可以了 命令列參數 描述 /Command (devenv.exe) 啟動 IDE 並執行指定的命令. /Debug ...
- web通信类几个相关知识
1.什么是同源策略及限制? 同源策略限制从一个源加载的文档或者脚本如何与来自另一个源的资源进行交互. 这是一个用于隔离潜在恶意文件的关键安全机制. 所谓同源,就是指两个页面具有相同的协议,主机(也常说 ...
- [python之路]变量和字符编码
变量和字符编码 #变量##声明变量```#_*_coding:utf-8_*_ name = "Tom"```上述代码声明了一个变量,变量名为: name,变量name的值为:&q ...