先进驾驶员辅助系统ADSA
ADSA(Advanced Driver-Assistance Systems)字面翻译过来是“先进驾驶员辅助系统”,实际上它是一种“辅助驾驶员更便捷更安全使用汽车”的系统。
ADAS的研发历史可以追溯到上个世纪50年代,工程师开始尝试将雷达布置在汽车上,用以实现周围环境的检测功能。据维基百科中对ADAS系统的描述,第一台具有ADAS功能的量产车是在1997年由丰田推出的Celsior,该车具备自适应巡航功能。
随后越来越多的传感器被安装在车上,ADAS功能也越来越丰富。
能被称作ADAS的功能有很多,无论是常见的自适应巡航,还是更高端的车道保持辅助,甚至L2级别的自动驾驶功能,都是依赖以下三种传感器实现的,它们分别是毫米波雷达、视觉传感器和超声波雷达,如下图。

毫米波雷达
说到雷达,首先浮现在脑海中的,肯定是下面这两个场景。场景中的雷达是通过发射电磁波进行物体监测的。

电磁波雷达被发明后,成本极高,仅用于军事、航空等高端领域,同时应用场景也决定了它的尺寸巨大。随着技术越来越成熟及电磁波雷达商业化的潜力,车载的电磁波雷达也越来越常见,甚至很多平价车型也标配了电磁波雷达。
应用于汽车的电磁波雷达一般是指毫米波雷达。顾名思义,毫米波雷达发出电磁波的波长在毫米量级。最常见的毫米波雷达是频率介于77Ghz~79Ghz的长距离毫米波雷达。
长距离毫米波雷达一般安装在汽车的前、后保险杠中,能够帮助车辆实现自适应巡航、前方碰撞预警和自动紧急刹车功能。
长距离毫米波雷达
长距离毫米波雷达一般安装在汽车的前、后保险杠中。如下图所示,被标注为绿色框的Long-range radar。长距离毫米波雷达能够实现的ADAS功能很多,最常见的有自适应巡航、自动紧急刹车。

自适应巡航
自适应巡航(Adaptive Cruise Control,简称ACC)技术出现在量产车上可以追溯到1999年,奔驰、捷豹、日产在其豪华车型上配备了ACC功能。
ACC的原理并不复杂。首先设置一个跟车距离,随后通过长距离毫米波雷达实时监测前方的汽车,通过对发动机和制动器的控制,使前车与自车始终保持在设定的距离。这样驾驶员就可以解放双脚,控好方向盘即可。
自适应巡航,了解一下?
前方碰撞预警
前方碰撞预警(Front Collision Warning,简称FCW)是在自车行驶过程中对有可能出现的碰撞风险进行预警,以提醒驾驶员减速。当然FCW还有一个升级版,叫自动紧急刹车(Autonomous Emergency Braking,简称AEB),AEB除了能实现FCW的预警功能外,还能在预警后对车辆的制动系统进行控制,紧急介入减速车辆,降低碰撞风险。
理论上毫米波雷达和摄像机均能实现FCW功能,不过业界更多地使用毫米波雷达。因为自动紧急刹车功能,需要前方障碍物的准确距离,这样才能根据汽车动力学模型准确计算出碰撞时间,进而判断是否需要预警,而摄像头在距离测量的精度方面是远远不如毫米波雷达的。
前方碰撞预警,了解一下?
中距离毫米波雷达
中距离毫米波雷达一般安装在汽车的四个角上。如下图所示,被标注为橙色框的Corner radar和Rear radar。中距离毫米波雷达能够实现最常见的ADAS功能的盲点监测。
盲点监测系统
盲点监测系统(Blind Spot Monitor)是用于监测自车后侧方盲区内其他汽车的系统,用以提醒驾驶员后侧方存在碰撞风险,请勿变道。该功能的实现依赖于后侧向毫米波雷达对障碍物的检测能力,并以此为根据对驾驶员进行预警。
盲点监测系统,了解一下?
当然,侧向毫米波雷达除了能在开车时进行盲区的监测外,还能够在停车时,监测后方来车,实现开门报警的功能,如下图所示。

摄像机
得益于5年前AI技术的大爆发,使得使用图像做识别的门槛突然降低,摄像机也成了ADAS领域的标配,基于摄像机的驾驶员监测、车道偏离预警、交通标志识别等功能被广泛应用在量产车型中。
驾驶员监测
驾驶员监测(Driver Monitoring System,简称DMS)最早出现在量产车上是在2006年的雷克萨斯GS 450h上,随着技术慢慢成熟越来越多的豪华车上配备了该系统。
目前最成熟的当属凯迪拉克CT6上的DMS了,它通过监测驾驶员的面部,获取驾驶员的注意力信息,配合高速公路自动驾驶系统使用,当驾驶员注意力不在道路上时,则预警。如下图所示,摄像头的安装位置在仪表盘前方。

驾驶员监测,了解一下?
车道偏离预警
车道偏离预警(Lane Departure Warning,简称LDW)是业界耳熟能详的功能。因为实现车道线和汽车的相对关系是安全辅助驾驶最基本的需求之一。
LDW仅提供预警功能,汽车回到车道内行驶需要驾驶员手动控制方向盘。在预警的基础上,LDW可以升级到更高级的车道保持辅助系统(Lane Keep Assist,简称LKA),在驾驶员未对警告信息做处理的情况下,汽车自动回正方向盘,保持车辆在本车道内行驶。如果真要换道怎么办?那就请先打开转向灯。
车道偏离预警系统和车道保持辅助系统,了解一下?
超声波雷达
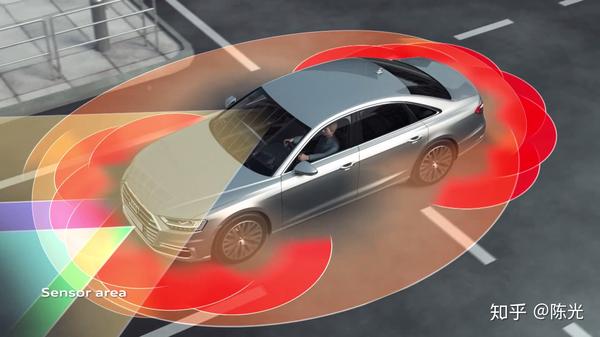
超声波雷达基本以作为标配存在于量产车上,驾驶员一般成之为倒车雷达。车载的超声波雷达一般安装在汽车的保险杠上方,隐藏在保险杠的某个位置。在车上外观如下图黄色箭头处的圆点所示。

下图中深红色区域所示,即为超声波雷达能够探测的范围。超声波雷达一般用于低速的ADAS场景,比如远程唤车和自动泊车。
远程召唤
远程召唤(Remote Summon)是近几年被特斯拉带火的一个功能。当汽车停在一个比较狭窄的空间时,不便进入车内时,使用该功能能较方便地将汽车移出车位。汽车收到召唤指令后,会通过车身周围的超声波雷达,感知周围的障碍物位置,进而选择一条最优的出库路径。
特斯拉能够使用车钥匙对汽车发送唤车指令,汽车收到指令后会根据周围环境进行先前或向后的移动。随着汽车越来越智能化,现在也有部分汽车能够用手机直接进行远程召唤。
远程召唤,了解一下?
自动泊车
自动泊车(Automatic Parking Asistance,简称APA)是很多新手司机最爱的ADAS功能之一。汽车缓缓驶过库位时,汽车侧方的超声波雷达可以探测到侧方是否存在一个空闲的空间,使得汽车能够泊入其中。如下图所示:

汽车缓缓驶过库位时,汽车右前方的APA传感器返回的探测距离与时间的关系大致如下图:
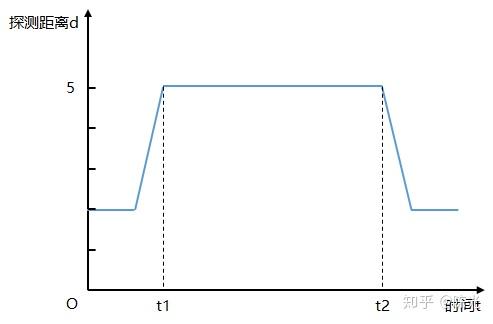
将t1时刻到t2时刻的车速做积分即可得到库位的近似长度,如果近似认为汽车为匀速行驶,直接用车速乘以(t2-t1)即可。当检测的长度超过车辆泊入所需的最短长度时则认为当前空间有车位。
同样后侧向的APA也会生成类似信号曲线,用以做库位的二次验证。
有了库位检测功能,进而开发自主泊车功能就不是难事了。
自动泊车,了解一下?
小结
以上就是目前主流汽车ADAS功能的技术盘点。发挥你的想象力,你会发现,车载的毫米波雷达、超声波雷达和视觉传感器除了在ADAS领域各司其职,还构成自动驾驶功能的三头六臂,配合越来越多汽车所具备的OTA功能,汽车将会像手机一样,拥有一个越来越聪明的大脑。
OTA和丰富的车载传感器为汽车自动驾驶提供了可发挥的空间,也许在不久的将来,你的汽车将能拥有Level 2的自动驾驶能力,我们拭目以待~
作者:陈光
链接:https://zhuanlan.zhihu.com/p/49170116
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
先进驾驶员辅助系统ADSA的更多相关文章
- BOSCH汽车工程手册————驾驶员辅助系统
根据交通事故统计得出平均每分钟有一人死于交通事故 而辅助驾驶系统能够为驾驶员洞察了解汽车周围情况,识别危险的行驶状况. 提早为驾驶员告诉危险信息,可减少60%汽车驶上主路事故和1/3汽车前碰事故. 有 ...
- adas--智能驾驶辅助系统
先进驾驶辅助系统(Advanced Driver AssistantSystem),简称ADAS,是利用安装于车上的各式各样的传感器(可侦测光.热.压力等变数), 在第一时间收集车内外的环境数据, 进 ...
- Mobileye高级驾驶辅助系统(ADAS)
Mobileye高级驾驶辅助系统(ADAS) Mobileye is the global leader in the development of vision technology for Adv ...
- Android 提供的一系列辅助系统开发工具
除了软件本身的代码之外,Android 还提供了一系列工具来辅助系统开发,这些主要的工具包括: aapt(AndroidAssetPackagingTool):用于建立zip兼容的包(zip.jar. ...
- 生鲜配送管理系统_升鲜宝 V2.0 小程序辅助系统工具矩阵系列相关说明
随着微信红利的进一步释放,使用人群的不断增加,小程序从2017年01月第一批开发者出现后,2018年小程序得到快速的提升,小程序开发的相关应用小工具得到了市场的青咪,社会化大分工.协同.共享.协作的思 ...
- Facebook开源最先进的语音系统wav2letter++
最近,Facebook AI Research(FAIR)宣布了第一个全收敛语音识别工具包wav2letter++.该系统基于完全卷积方法进行语音识别,训练语音识别端到端神经网络的速度是其他框架的两倍 ...
- 了解FPGA市场现状和未来趋势
转, 来源: http://www.sohu.com/a/204640373_740053 可编程的“万能芯片” FPGA——现场可编程门阵列,是指一切通过软件手段更改.配置器件内部连接结构和逻辑单元 ...
- SLAM方向国内有哪些优秀公司?
计算机视觉life为读者整理了国内几十家涉及SLAM的优秀公司,涵盖自动驾驶.仓储机器人.服务机器人.无人机.AR.芯片相机等领域. 一 自动/辅助驾驶: 1.百度: 主要产品:自动驾驶软件 百度智能 ...
- 【DSP开发】【计算机视觉】TI 视觉软件开发套件ADAS
关键字:TI 视觉软件开发套件 ADAS 日前,德州仪器 (TI) 宣布推出其视觉软件开发套件(SDK),从而为开发人员提供了一款灵活的框架.一组丰富齐全的硬件设备驱动程序和一套适用的开发工具,可 ...
随机推荐
- hdu-1850-nim
Being a Good Boy in Spring Festival Time Limit: 1000/1000 MS (Java/Others) Memory Limit: 32768/32 ...
- zzuli1427 NO.6校赛----数字转换
1427: 数字转换 Time Limit: 1 Sec Memory Limit: 128 MBSubmit: 572 Solved: 153 SubmitStatusWeb Board Des ...
- C++技能重拾
0.虽然静态成员函数不存在this指针,但还是不能在一个class里声明同名同参的虚函数和静态成员函数. 1.vftable里一个虚函数表是一个指针 2.delete本质,调用析构函数同时释放内存Ob ...
- javascript primise本质——为了简化异步编码而针对异步操作的代理
概述 所谓Promise,简单说就是一个容器,里面保存着某个未来才会结束的事件(通常是一个异步操作)的结果. 语法 new Promise(executor); new Promise(functio ...
- 线程的创建,pthread_create,pthread_self,pthread_once
typedef unsigned long int pthread_t; //come from /usr/include/bits/pthreadtypes.h int pthread_create ...
- Android Studio NDK开发入门
从Android Studio 1.3 Beta1开始,就支持了NDK,我目前使用的版本是1.5.首先强调几点. 1.必须安装NDK并配置好环境变量(和配置JDK环境变量如出一辙:新建NDK_HOME ...
- python 模块化管理,导入自己的模块(包)
很多东西似懂非懂,或者当时看懂了,但是感觉不是很重要,经常不用,时间久了,也就变得似懂非懂了.今天被某度电话面试问道一个问题,就是模块倒入,其实我之前也是很仔细的研究过的,不过由于平时做的东西太简单, ...
- DevExpress v17.2新版亮点—Mobile Controls篇
用户界面套包DevExpress v17.2日前终于正式发布,本站将以连载的形式为大家介绍各版本新增内容.本文将介绍了Mobile Controls v17.2 的新功能,快来下载试用新版本! New ...
- Hibernate: ids for this class must be manually assigned before calling save():
原文: http://blog.csdn.net/softimes/article/details/7008875 引起问题的原因: 由Hibernate根据数据库表自动生成的"类名.hbm ...
- SharePoint Foundation 搜索-PowerShell
1. 显示搜索服务信息 Get-SPSearchService 2. 显示搜索服务实例 Get-SPSearchServiceInstance 3. 获取指定搜索服务实例 $ssInstance = ...