“为什么DirectX里表示三维坐标要建一个4*4的矩阵?”
0x00 前言

首先要说明的是,本文的标题事实上来自于知乎上的一个同名问题:为什么directX里表示三维坐标要建一个4*4的矩阵? - 编程 。因此,正如Milo Yip大神所说的这个标题事实上是存在问题的:矩阵是用于表示变换而不是坐标的。再了解了矩阵的作用之后,我们就要继续思考为什么变换要使用一个4×4的矩阵而不是3×3的矩阵呢?是不是多此一举呢?下面我们就来聊聊这个话题。
0x01 怎么平移一个三维空间中的点?
我们应该怎么平移一个三维空间中的点呢?答案很简单,我们只需要对这个点的坐标中的每个分量(x,y,z)和对应轴上的平移距离相加即可。
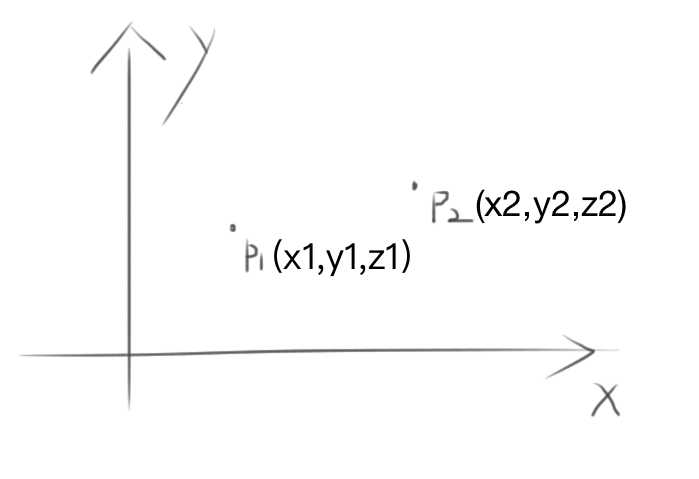
例如,点p1(x1,y1,z1)在X轴Y轴以及Z轴上分别平移Δx,Δy,Δz到新的点p2(x2,y2,z2),那么我们只需在坐标对应的分量上加上这些增量就可以确定点p2的坐标了。
x2 = x1 + Δx
y2 = y1 + Δy
z2 = z1 + Δz
很简单是吗?那么接下来再让我们来看一看另一种变换:旋转。
0x02 再来旋转一个点
旋转相比较平移来说,会略显复杂一些。因为我们需要指明以下几个方面来描述一个旋转:
- 旋转轴
- 旋转方向
- 旋转角度
在这里,我们假设点p需要绕Z轴顺时针旋转β度。
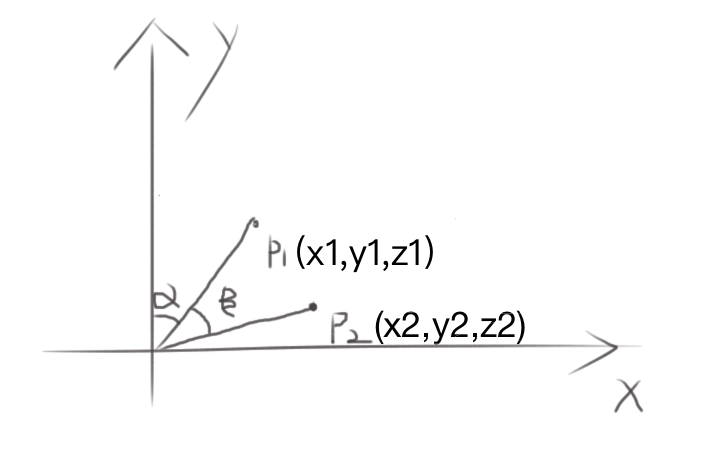
如这个很难看的图所示,我们的点P1(x1,y1,z1)以Z轴位轴顺时针旋转β度之后来到了点P2(x2,y2,z2)。接下来,让我们假设原点到P1的距离位L,且P1和Y轴之间的夹角位α,那么根据三角函数公式我们就可以计算出P1点的具体坐标了:
x1 = L·sinα
y1 = L·cosα
由于是绕Z轴旋转,因此z坐标不变,因此此处不考虑。
同样根据三角函数公式,我们可以继续计算出P2的具体坐标:
x2 = L·sin(α + β)
y2 = L·cos(α + β)
再让我们回忆一下中学时代的几何数学的内容,对青春的回忆又把我们带回了课堂上老师声嘶力竭向我们传授的内容——两角和与差:
cos(α+β)=cosα·cosβ-sinα·sinβ
cos(α-β)=cosα·cosβ+sinα·sinβ
sin(α+β)=sinα·cosβ+cosα·sinβ
sin(α-β)=sinα·cosβ-cosα·sinβ
回忆起老师传授给我们的知识之后,接下来结合P1的坐标表示形式我们就可以把P2的坐标换一个表示形式了。
x2 = L·(sinα·cosβ+cosα·sinβ) = cosβ·x1 + sinβ·y1
y2 = L·(cosα·cosβ-sinα·sinβ) = cosβ·y1 - sinβ·x1
z2 = z1
因此,在已知P1点坐标以及旋转角度β的情况下,我们就可以根据以上公式分别求出P2点坐标的各个分量。如果再结合上一小节中平移一个点的公式来看,我们可以发现似乎并不需要矩阵,而仅仅通过两组表达式就能实现坐标的变换。但是......
0x03 带来便捷的矩阵
当然,从理论上讲我们的确可以只通过数学公式就能实现变换,但实际的情况却是在变换十分复杂时,直接使用数学表达式来进行运算也是相当繁复的。因此,在现实中常常使用矩阵(由m × n个标量组成的长方形数组)来表示诸如平移、旋转以及缩放等线性变换。而另一个更有趣的事实是,当两个变换矩阵A和B的积为P=AB时,则变换矩阵P相当于A和B所代表的变换。举一个例子,若A为旋转矩阵,B为平移矩阵,则矩阵P就能够实现旋转和平移变换。不过需要注意的是,矩阵乘法不符合交换律,因此AB和BA并不相等。
说了这么多,我们似乎还是没有回答为什么三维空间需要一个4×4矩阵来实现变换呢?下面我们就带着这个问题,分别看看3×3矩阵和4×4矩阵的使用吧。
3×3矩阵和旋转
首先,我们先来看一个矩阵乘以一个三维矢量的算式:
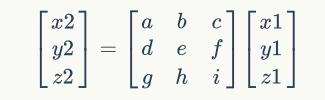
可以看到该矩阵为一个3×3的矩阵,矩阵的右侧是点P1的坐标,而矩阵的左侧则是点P2的坐标。根据这个表达式,我们可以求出x2、y2、z2的值:
x2 = a·x1 + b·y1 + c·z1
y2 = d·x1 + e·y1 + f·z1
z2 = g·x1 + h·y1 + i·z1
为了将矩阵等式和之前小节的数学表达式联系起来,下面我们就将旋转表达式和该矩阵等式做一个对比。
x2 = a·x1 + b·y1 + c·z1
x2 = cosβ·x1 + sinβ·y1y2 = d·x1 + e·y1 + f·z1
y2 = cosβ·y1 - sinβ·x1z2 = g·x1 + h·y1 + i·z1
z2 = z1
通过对比x2,我们可以发现a=cosβ,b=sinβ,c=0;
对比y2,也可以发现d=-sinβ,e=cosβ,f=0;
最后对比z2,可以确定g=0,h=0,i=1;
将这个结果带入到之前的矩阵中,我们的等式就可以变成下面这个样子:
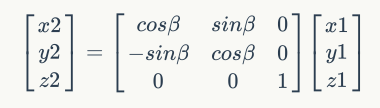
也就是说,通过这个3×3的变换矩阵,我们就已经实现了三维空间的旋转变换。那么为什么还需要使用4×4矩阵呢?
搞不定的平移,4×4矩阵来救场
我们已经通过一个3×3矩阵搞定了旋转变换,显然如果这个3×3矩阵真的是完美的解决变换的方案的话,那么它显然也必须要适合于其他的变换,例如平移。但是它到底能否满足平移的需求呢?下面我们还是通过对比矩阵等式和数学表达式的方式,来寻找答案。
x2 = a·x1 + b·y1 + c·z1
x2 = x1 + Δxy2 = d·x1 + e·y1 + f·z1
y2 = y1 + Δyz2 = g·x1 + h·y1 + i·z1
z2 = z1 + Δz
通过对比,我们发现平移和旋转之间很有趣的一个区别,那就是平移的表达式中带有常量Δx,而无论是旋转的表达式还是矩阵等式中都不存在这样一个常量能够与之对应。那么问题就来,我们没有办法使用3×3的矩阵来表示平移。这个问题该如何解决呢?答案其实很简单,那就是使用4×4矩阵来实现。但是随之而来的一个问题就是如何让一个三维坐标和一个4×4的矩阵相乘呢?
齐次坐标
为了解决三维矢量和4×4矩阵相乘的问题,我们机智的为三维矢量添加了第四个分量,这样之前的三维矢量(x,y,z)就变成了四维的(x,y,z,w),这样由4个分量组成的矢量便被称为齐次坐标。需要说明的是,齐次坐标(x,y,z,w)等价于三维坐标(x/w,y/w,z/w),因此只要w分量的值是1,那么这个齐次坐标就可以被当作三维坐标来使用,而且所表示的坐标就是以x,y,z这3个值为坐标值的点。
因此,为了和4×4矩阵相乘,我们的P1点坐标就变成了(x1,y1,z1,1)。而矩阵等式也变成了下面这个样子:
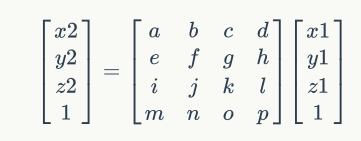
我们再将这个新的矩阵等式和平移的数学表达式做一番对比:
x2 = a·x1 + b·y1 + c·z1 + d
x2 = x1 + Δxy2 = e·x1 + f·y1 + g·z1 + h
y2 = y1 + Δyz2 = i·x1 + j·y1 + k·z1 + l
z2 = z1 + Δz1 = m·x1 + n·y1 + o·z1 + p
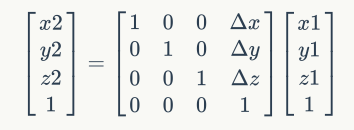
通过对比x2,我们可以发现a=1,b=0,c=0,d=Δx;
对比y2,也可以发现e=0,f=1,g=0,h=Δy;
再对比z2,可以确定i=0,j=0,k=1,l=Δz;
最后还可以根据表达式求出m=0,n=0,o=0,p=1;
这样,我们就求出了我们的4×4的平移矩阵:
0x04 总结
写到这里,不知各位是否还记得之前在介绍矩阵乘法的时候我有提到过两个变换矩阵A和B的积P=AB,相当于A和B所代表的变换。事实上在游戏编程中,常常需要把一连串的变换预先通过计算成为单一矩阵,所以就不能即存在3×3的矩阵又存在4×4的矩阵。而将3×3矩阵拓展成4×4矩阵还是相对更加容易的。这样,就通过一个4×4矩阵整合了平移矩阵、旋转矩阵。
“为什么DirectX里表示三维坐标要建一个4*4的矩阵?”的更多相关文章
- ACM1174_爆头解题思路_空间三维坐标求点到直线的距离
/* 爆头 Description gameboy是一个CS高手,他最喜欢的就是扮演警察, 手持M4爆土匪的头.也许这里有人没玩过CS,有必 要介绍一下“爆头”这个术语:所谓爆头,就是子 弹直接命中对 ...
- OpenGL 获取当前屏幕坐标的三维坐标(gluUnProject使用例子 Qt)
之前使用VS+glut实现了gluUnProject使用例子,用于渲染管道的逆过程,将屏幕坐标转换为opengl三维坐标,本文将尝试使用QT来实现. 代码如下: main.cpp 12345678 ...
- MATLAB在三维坐标中显示图片 并 使得图片部分透明
要画一个光路图,本来可以用proe,但是鼠标不好用,有些操作也忘了,用MATLAB画了个.下面是用到的图片. 但是三维坐标中显示彩色图片的目标没有搞定,做了个灰度图,然后用仿射程序将彩色图片贴到了二维 ...
- OpenGL 获取当前屏幕坐标对应的三维坐标
转自原文 OpenGL 获取当前屏幕坐标对应的三维坐标,使用很简单glu库中的一个函数 #include <GL/glut.h> #include <stdlib.h> #in ...
- VTK根据三维坐标点集生成点云
一个简单的利用VTK根据三维坐标点集生成点云的例子,仅供参考. 一.环境:vtk-8.1 & vs2013(需自行配置vtk的环境) 二.我所读取的三维坐标点集为txt格式文件,每个点的x,y ...
- Direct-X学习笔记--三维摄像机
一.介绍 哇! 到了传说中的3D摄像机啦! 之前我们写的东东,都是观察点不动,通过世界变换让东西动,今天,通过三维摄像机我们就能够改变我们的观察点,观察方向,任意在三维空间中驰骋.之前我们所设定的视角 ...
- 基于gulp编写的一个简单实用的前端开发环境好了,安装完Gulp后,接下来是你大展身手的时候了,在你自己的电脑上面随便哪个地方建一个目录,打开命令行,然后进入创建好的目录里面,开始撸代码,关于生成的json文件请点击这里https://docs.npmjs.com/files/package.json,打开的速度看你的网速了注意:以下是为了演示 ,我建的一个目录结构,你自己可以根据项目需求自己建目
自从Node.js出现以来,基于其的前端开发的工具框架也越来越多了,从Grunt到Gulp再到现在很火的WebPack,所有的这些新的东西的出现都极大的解放了我们在前端领域的开发,作为一个在前端领域里 ...
- 转载 STM32 使用Cubemx 建一个USB(HID)设备下位机,实现数据收发
STM32 使用Cubemx 建一个USB(HID)设备下位机,实现数据收发 本文转载自 https://www.cnblogs.com/xingboy/p/9913963.html 这里我主要说一 ...
- 给你的Kubernetes集群建一个只读账户(防止高管。。。后)
给你的Kubernetes集群建一个只读账户 需求:我们知道搭完k8s集群会创建一个默认的管理员kubernetes-admin用户该用户拥有所以权限,有一天开发或测试的同学需要登录到k8s集群了解业 ...
随机推荐
- OVS local network 连通性分析 - 每天5分钟玩转 OpenStack(132)
前面已经创建了两个 OVS local network,今天详细分析它们之间的连通性. launch 新的 instance "cirros-vm3",网络选择 second_lo ...
- 后缀数组的倍增算法(Prefix Doubling)
后缀数组的倍增算法(Prefix Doubling) 文本内容除特殊注明外,均在知识共享署名-非商业性使用-相同方式共享 3.0协议下提供,附加条款亦可能应用. 最近在自学习BWT算法(Burrows ...
- 【干货分享】流程DEMO-出差申请单
流程名: 出差申请 业务描述: 员工出差前发起流程申请,流程发起时,会检查预算,如果预算不够,将不允许发起费用申请,如果预算够用,将发起流程,同时占用相应金额的预算,但撤销流程会释放相应金额的预算. ...
- 熊乐:H3 BPM为加速企业流程管理提供源动力
近日,在北京·金隅喜来登酒店,H3 BPM以"让天下没有难用的流程"为主题,正式发布H3 BPM10.0版本.全新的业务流程管理系统在易用性方面大大提升,并且全面支持Java与.N ...
- iOS之应用版本号的设置规则
版本号的格式:v<主版本号>.<副版本号>.<发布号> 版本号的初始值:v1.0.0 管理规则: 主版本号(Major version) 1. 产品的主体构件进 ...
- 学习笔记:delphi之TStringGrid
1.说明 最近加入了一个项目组,使用的开发工具是delphi6,想想又要开始搞这个工具有点小忧伤,但没办法谁让咱就是个打杂的尼... 的需求是显示一个类似于Word/excel的那种表格,可以合并列等 ...
- Xamarin中使用DatePickerDialog的相关问题
在Xamarin中在使用Datepicker的时候,一般情况下只需要在对应的按钮或其他控件的点击事件中使用如下语句即可完成: EditText etBirthday = FindViewById< ...
- C#与C++的发展历程第四 - C#6的新时代
*:first-child { margin-top: 0 !important; } body>*:last-child { margin-bottom: 0 !important; } /* ...
- Atitit MATLAB 图像处理attilax总结
Atitit MATLAB 图像处理attilax总结 1.1. 下载 Matlab7.0官方下载_Matlab2012 v7.0 官方简体中文版-办公软件-系统大全.html1 1.2. Matla ...
- iOS App引导页功能实现
一.写作原因 以前都没有想着来写点东西,今天遇到件事情让我决定每次还是要做记录.因为以前自己可以轻松的完成pod spec的配置,但是今天在做的时候还是忘了遇到了很多坑.pod spec配置遇到的坑不 ...