一种适合于MC与SMC算法的哈希表设计
MC算法与SMC算法中的三角片焊接问题
在之前的关于MC算法与SMC算法的博文中介绍了算法的实现,文章主要围绕算法的核心问题,即三角片如何产生的问题进行了详细的描述。但由于实际应用中需要的等值面Mesh数据不是三角片的简单并集,所以需要进行所谓的顶点焊接(Vertex Welding)来生成正确的拓扑结构以反应三角片之间的共用顶点关系。顶点焊接,简单的说就是把三角片中重合的顶点算作一个顶点加入顶点集。在之前博文中的代码实现里,采用了一种MeshBuilder类来实现这样的顶点焊接。其核心思想是采用哈希表来避免顶点的重复加入,逻辑简单点说就是下面这几步:
- 对三角片集合中的所有三角形
- 对三角形的三个顶点
- 若顶点P在哈希表中不存在
- 将顶点P加入顶点列表
- 将P加入哈希表
- 若顶点P在哈希表中不存在
- 对三角形的三个顶点
- 结束循环
采用的哈希表是根据点坐标来计算哈希值的,这样相同的点必然对应一样的哈希值。这样重复的点就不会再被加入顶点列表。由于哈希表理论上有很好的存取速度,故MC算法和SMC算法即可采用此逻辑来将体元中的三角片焊接成具有拓扑结构的Mesh。
 |
 |
| MC算法的焊接顶点 | SMC算法的焊接顶点 |
一种新的设计
上文所述的实现方式是为了突出MC、SMC算法的“从每个体元中抽取三角片”的主逻辑而简化了顶点焊接的逻辑。事实上,采用上文说的哈希表会存在一定的时间和空间效率问题。之前的另一篇关于顶点焊接的文章“浅议顶点焊接与哈希表的设计”提出的几种哈希表,不能很好的同时兼顾时间和空间效率。在数据规模较大的情况下,顶点焊接逻辑很容易就成为算法的瓶颈。
例如使用三维数组哈希表,很明显需要sizeof(long)*with*height*depth的空间,是巨大的空间消耗。而使用二维数组堆砌哈希表,则容易让更多的时间花费在顺序查找链表上。归根结底,这些将顶点所有可能位置都考虑到的哈希表,没有充分利用MC/SMC算法三角片产生的局部特点。
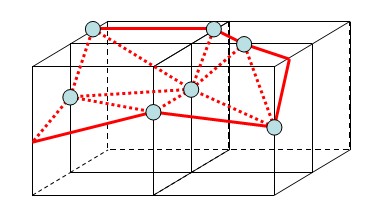
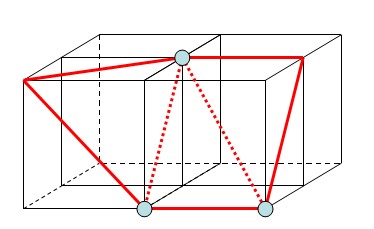
考虑到MC/SMC中三角片是逐个从体元中抽取的,这样只有相邻两层的三角片顶点才可能产生重复现象如下图,那么三角片的产生,应该可以这样考虑:
- 抽取第i层体元的三角片并焊接之
- 抽取第i+1层体元的三角片并焊接之
- 焊接第i层三角片与第i+1层三角片

为此,可以设计一个有两层二维数组组成的哈希表,二维数组的尺寸都是width*height。用以表示一层体元上下两层顶点的可能的哈希位置。每抽取完一层的体元,这两层数组会往下自动推进一层,同时还需要有变量记录当前指示的层位置。
对于SMC算法,由于顶点只能在格点上,故基于此原理的哈希表可以实现如下:
class SMCTriangleNetHashTable
{
public int CurrentLayerIndex; int stx;
int sty;
int width;
int height;
List<int[,]> mapList;
public SMCTriangleNetHashTable(int minx, int miny, int width, int height)
{
this.stx = minx - 1;
this.sty = miny - 1;
this.width = width + 2;
this.height = height + 2;
mapList = new List<int[,]>(2);
mapList.Add(new int[this.width, this.height]);
mapList.Add(new int[this.width, this.height]);
SetDefaultValue(0);
SetDefaultValue(1);
}
public void SetDefaultValue(int index0_1)
{
for (int i = 0; i < width; i++)
{
for (int j = 0; j < height; j++)
{
mapList[index0_1][i, j] = -1;
}
}
}
public void IncreaseIndex()
{
CurrentLayerIndex++;
SetDefaultValue(0);
int[,] temp = mapList[0];
mapList[0] = mapList[1];
mapList[1] = temp;
}
public void SetHashValue(int x, int y, int z, int value)
{
int index0_1 = z - CurrentLayerIndex;
mapList[index0_1][x - stx, y - sty] = value;
}
public int GetHashValue(int x, int y, int z)
{
int index0_1 = z - CurrentLayerIndex;
return mapList[index0_1][x - stx, y - sty];
}
}
这样SMC算法的实现形式如下:
public class SMCProcessor
{
struct OriginalTriangle
{
public Int16Triple P0;
public Int16Triple P1;
public Int16Triple P2;
public OriginalTriangle(int p0x, int p0y, int p0z, int p1x, int p1y, int p1z, int p2x, int p2y, int p2z)
{
P0.X = p0x;
P0.Y = p0y;
P0.Z = p0z;
P1.X = p1x;
P1.Y = p1y;
P1.Z = p1z;
P2.X = p2x;
P2.Y = p2y;
P2.Z = p2z;
}
}
public static byte VULF = 1 << 0;
public static byte VULB = 1 << 1;
public static byte VLLB = 1 << 2;
public static byte VLLF = 1 << 3;
public static byte VURF = 1 << 4;
public static byte VURB = 1 << 5;
public static byte VLRB = 1 << 6;
public static byte VLRF = 1 << 7;
//以上为体素为实点的位标记
public static Int16Triple[] PointIndexToPointDelta = new Int16Triple[8]
{
new Int16Triple(0, 1, 1 ),
new Int16Triple(0, 1, 0 ),
new Int16Triple(0, 0, 0 ),
new Int16Triple(0, 0, 1 ),
new Int16Triple(1, 1, 1 ),
new Int16Triple(1, 1, 0 ),
new Int16Triple(1, 0, 0 ),
new Int16Triple(1, 0, 1 )
};//体元内每个体素相对基准体素坐标的偏移
public static byte[] PointIndexToFlag = new byte[8]
{
VULF,
VULB,
VLLB,
VLLF,
VURF,
VURB,
VLRB,
VLRF
};//每个体素对应的位标记
BitMap3d bmp;
int d;
int h;
int w;
int wh;
public SMCProcessor(BitMap3d bitmap)
{
this.bmp = bitmap;
}
public Mesh GenerateSurface()
{
d = bmp.depth;
h = bmp.height;
w = bmp.width;
wh = w * h;
Int16Triple[] temp = new Int16Triple[8];
Mesh m = new Mesh();
OriginalTriangle[] tempTriangles = new OriginalTriangle[4];
SMCTriangleNetHashTable hash = new SMCTriangleNetHashTable(0, 0, w, h); for (int k = 0; k <= d - 1; k++)
{
for (int j = 0; j <= h - 1; j++)
{
for (int i = 0; i <= w - 1; i++)
{
byte value = GetConfig(temp, bmp, i, j, k);
if (value == 0 || value == 255)
continue;
int tcount = ExtractTriangles(temp, value, i, j, k, tempTriangles);
for (int tindex = 0; tindex < tcount; tindex++)
{
MergeTriangleIntoMesh(m, hash, tempTriangles[tindex]);
}
}
}
hash.IncreaseIndex();
}
return m;
} private byte GetConfig(Int16Triple[] temp, BitMap3d flagsMap, int indexInWidth, int indexInHeight, int indexInDepth)
{
byte value = 0;
for (int pi = 0; pi < 8; pi++)
{
temp[pi].X = indexInWidth + PointIndexToPointDelta[pi].X;
temp[pi].Y = indexInHeight +PointIndexToPointDelta[pi].Y;
temp[pi].Z = indexInDepth + PointIndexToPointDelta[pi].Z;
if (temp[pi].X < w && temp[pi].X >= 0
&& temp[pi].Y < h && temp[pi].Y >= 0
&& temp[pi].Z < d && temp[pi].Z >= 0
&& bmp.data[temp[pi].X + w * (temp[pi].Y) + wh * (temp[pi].Z)] == BitMap3d.WHITE)
{
value |= PointIndexToFlag[pi];
}
}
return value;
} private int ExtractTriangles(Int16Triple[] temp, byte value, int indexInWidth, int indexInHeight, int indexInDepth, OriginalTriangle[] result)
{
int tcount = 0;
if (SMCTable.TableFat[value, 0] != -1)
{
int index = 0;
while (SMCTable.TableFat[value, index] != -1)
{
Int16Triple t0 = temp[SMCTable.TableFat[value, index]];
Int16Triple t1 = temp[SMCTable.TableFat[value, index + 1]];
Int16Triple t2 = temp[SMCTable.TableFat[value, index + 2]];
result[tcount] = new OriginalTriangle(t0.X, t0.Y, t0.Z, t1.X, t1.Y, t1.Z, t2.X, t2.Y, t2.Z);
tcount++;
index += 3;
}
}
return tcount;
} private void MergeTriangleIntoMesh(Mesh mesh, SMCTriangleNetHashTable hashMap, OriginalTriangle ot)
{
int p0x = ot.P0.X;
int p0y = ot.P0.Y;
int p0z = ot.P0.Z;
int p1x = ot.P1.X;
int p1y = ot.P1.Y;
int p1z = ot.P1.Z;
int p2x = ot.P2.X;
int p2y = ot.P2.Y;
int p2z = ot.P2.Z;
int p0i;
int p1i;
int p2i;
int index = 0;
index = hashMap.GetHashValue(p0x, p0y, p0z);
if (index == -1)
{
p0i = mesh.AddVertex(new Point3d(p0x, p0y, p0z));
hashMap.SetHashValue(p0x, p0y, p0z, p0i);
}
else
{
p0i = index;
} index = hashMap.GetHashValue(p1x, p1y, p1z);
if (index == -1)
{
p1i = mesh.AddVertex(new Point3d(p1x, p1y, p1z));
hashMap.SetHashValue(p1x, p1y, p1z, p1i);
}
else
{
p1i = index;
} index = hashMap.GetHashValue(p2x, p2y, p2z);
if (index == -1)
{
p2i = mesh.AddVertex(new Point3d(p2x, p2y, p2z));
hashMap.SetHashValue(p2x, p2y, p2z, p2i);
}
else
{
p2i = index;
} Triangle t = new Triangle(p0i, p1i, p2i);
mesh.AddFace(t);
}
}
对于MC算法,由于定点不在格点上,而是在格子的边上,这样必须要把格子的边与格点坐标相对应。不难发现,从每一个格点出发,想着X,Y,Z轴正方向可以引三条边,这样每一个边都能按此方法找到所出发的格点。于是这样就可以构造一个二维数组:
class MCTriangleNetHashTable
{
public int CurrentLayerIndex; int stx;
int sty;
int width;
int height;
List<int[,,]> mapList;
public MCTriangleNetHashTable(int minx, int miny, int width, int height)
{
this.stx = minx - 1;
this.sty = miny - 1;
this.width = width + 2;
this.height = height + 2;
mapList = new List<int[,,]>(2);
mapList.Add(new int[this.width, this.height,3]);
mapList.Add(new int[this.width, this.height,3]);
SetDefaultValue(0);
SetDefaultValue(1);
}
public void SetDefaultValue(int index0_1)
{
for (int i = 0; i < width; i++)
{
for (int j = 0; j < height; j++)
{
mapList[index0_1][i, j, 0] = -1;
mapList[index0_1][i, j, 1] = -1;
mapList[index0_1][i, j, 2] = -1;
}
}
}
public void IncreaseIndex()
{
CurrentLayerIndex++;
SetDefaultValue(0);
int[,,] temp = mapList[0];
mapList[0] = mapList[1];
mapList[1] = temp;
}
public void SetHashValue(int x, int y, int z,int d, int value)
{
int index0_1 = z - CurrentLayerIndex;
mapList[index0_1][x - stx, y - sty,d] = value;
}
public int GetHashValue(int x, int y, int z,int d)
{
int index0_1 = z - CurrentLayerIndex;
return mapList[index0_1][x - stx, y - sty,d];
}
}
基于此种设计的MC算法的实现代码如下:
public class MCProcessor
{
struct OriginalTriangle
{
public Int16Triple CellCoord;
public int E0;
public int E1;
public int E2;
public OriginalTriangle(int x, int y, int z, int ei0, int ei1, int ei2)
{
CellCoord.X = x;
CellCoord.Y = y;
CellCoord.Z = z;
E0 = ei0;
E1 = ei1;
E2 = ei2;
}
}
public static byte VULF = 1 << 0;
public static byte VULB = 1 << 1;
public static byte VLLB = 1 << 2;
public static byte VLLF = 1 << 3;
public static byte VURF = 1 << 4;
public static byte VURB = 1 << 5;
public static byte VLRB = 1 << 6;
public static byte VLRF = 1 << 7;
//以上为体素为实点的位标记
public static Int16Triple[] PointIndexToPointDelta = new Int16Triple[8]
{
new Int16Triple(0, 1, 1 ),
new Int16Triple(0, 1, 0 ),
new Int16Triple(0, 0, 0 ),
new Int16Triple(0, 0, 1 ),
new Int16Triple(1, 1, 1 ),
new Int16Triple(1, 1, 0 ),
new Int16Triple(1, 0, 0 ),
new Int16Triple(1, 0, 1 )
};//体元内每个体素相对基准体素坐标的偏移
public static byte[] PointIndexToFlag = new byte[8]
{
VULF,
VULB,
VLLB,
VLLF,
VURF,
VURB,
VLRB,
VLRF
};//每个体素对应的位标记
public static int[,] EdgeIndexToEdgeVertexIndex = new int[12, 2]
{
{0,1}, {1,2},
{2,3},{3,0},
{4,5},{5,6},
{6,7}, {7,4},
{0,4}, {1,5},
{2,6}, {3,7}
};//每个边对应的两顶点体素的索引
public static Int16Quad[] CubeEdgeMapTable = new Int16Quad[12]
{
new Int16Quad(0,1,0,1),
new Int16Quad(0,0,0,0),
new Int16Quad(0,0,0,1),
new Int16Quad(0,0,1,0), new Int16Quad(1,1,0,1),
new Int16Quad(1,0,0,0),
new Int16Quad(1,0,0,1),
new Int16Quad(1,0,1,0), new Int16Quad(0,1,1,2),
new Int16Quad(0,1,0,2),
new Int16Quad(0,0,0,2),
new Int16Quad(0,0,1,2),
}; protected BitMap3d bmp;
protected int d;
protected int h;
protected int w;
protected int wh;
public MCProcessor(BitMap3d bitmap)
{
this.bmp = bitmap;
}
public Mesh GenerateSurface()
{
d = bmp.depth;
h = bmp.height;
w = bmp.width;
wh = w * h;
Int16Triple[] temp = new Int16Triple[8];
Mesh m = new Mesh();
OriginalTriangle[] tempTriangles = new OriginalTriangle[6];
MCTriangleNetHashTable hash = new MCTriangleNetHashTable(0, 0, w, h); for (int k = 0; k <= d - 1; k++)
{
for (int j = 0; j <= h - 1; j++)
{
for (int i = 0; i <= w - 1; i++)
{
byte value = GetConfig(temp, bmp, i, j, k);
if (value == 0 || value == 255)
continue;
int tcount = ExtractTriangles(temp, value, i, j, k, tempTriangles);
for (int tindex = 0; tindex < tcount; tindex++)
{
MergeTriangleIntoMesh(m, hash, tempTriangles[tindex]);
}
}
}
hash.IncreaseIndex();
}
return m;
} private byte GetConfig(Int16Triple[] temp, BitMap3d flagsMap, int indexInWidth, int indexInHeight, int indexInDepth)
{
byte value = 0;
for (int pi = 0; pi < 8; pi++)
{
temp[pi].X = indexInWidth + PointIndexToPointDelta[pi].X;
temp[pi].Y = indexInHeight + PointIndexToPointDelta[pi].Y;
temp[pi].Z = indexInDepth + PointIndexToPointDelta[pi].Z;
if (temp[pi].X < w && temp[pi].X >= 0
&& temp[pi].Y < h && temp[pi].Y >= 0
&& temp[pi].Z < d && temp[pi].Z >= 0
&& IsInsideIsoSurface(temp[pi].X,temp[pi].Y,temp[pi].Z))
{
value |= PointIndexToFlag[pi];
}
}
return value;
} private int ExtractTriangles(Int16Triple[] temp, byte value, int indexInWidth, int indexInHeight, int indexInDepth, OriginalTriangle[] result)
{
int tcount = 0;
if (MCTable.TriTable[value, 0] != -1)
{
int index = 0;
while (MCTable.TriTable[value, index] != -1)
{
int e0index = MCTable.TriTable[value, index];
int e1index = MCTable.TriTable[value, index + 1];
int e2index = MCTable.TriTable[value, index + 2];
result[tcount] = new OriginalTriangle(indexInWidth, indexInHeight, indexInDepth,e0index,e1index,e2index);
tcount++;
index += 3;
}
}
return tcount;
} private void MergeTriangleIntoMesh(Mesh mesh, MCTriangleNetHashTable hashMap, OriginalTriangle ot)
{
int e0i= CubeEdgeMapTable[ot.E0].D;
int p0x = ot.CellCoord.X + CubeEdgeMapTable[ot.E0].A;
int p0y = ot.CellCoord.Y + CubeEdgeMapTable[ot.E0].B;
int p0z = ot.CellCoord.Z + CubeEdgeMapTable[ot.E0].C; int e1i = CubeEdgeMapTable[ot.E1].D;
int p1x = ot.CellCoord.X + CubeEdgeMapTable[ot.E1].A;
int p1y = ot.CellCoord.Y + CubeEdgeMapTable[ot.E1].B;
int p1z = ot.CellCoord.Z + CubeEdgeMapTable[ot.E1].C; int e2i = CubeEdgeMapTable[ot.E2].D;
int p2x = ot.CellCoord.X + CubeEdgeMapTable[ot.E2].A;
int p2y = ot.CellCoord.Y + CubeEdgeMapTable[ot.E2].B;
int p2z = ot.CellCoord.Z + CubeEdgeMapTable[ot.E2].C; int p0i;
int p1i;
int p2i;
int index = 0;
index = hashMap.GetHashValue(p0x, p0y, p0z,e0i);
if (index == -1)
{
Point3d interp = GetIntersetedPoint(ot.CellCoord.X, ot.CellCoord.Y, ot.CellCoord.Z, ot.E0);
p0i = mesh.AddVertex(interp);
hashMap.SetHashValue(p0x, p0y, p0z,e0i,p0i);
}
else
{
p0i = index;
} index = hashMap.GetHashValue(p1x, p1y, p1z,e1i);
if (index == -1)
{
Point3d interp = GetIntersetedPoint(ot.CellCoord.X, ot.CellCoord.Y, ot.CellCoord.Z, ot.E1);
p1i = mesh.AddVertex(interp);
hashMap.SetHashValue(p1x, p1y, p1z,e1i ,p1i);
}
else
{
p1i = index;
} index = hashMap.GetHashValue(p2x, p2y, p2z,e2i);
if (index == -1)
{
Point3d interp = GetIntersetedPoint(ot.CellCoord.X, ot.CellCoord.Y, ot.CellCoord.Z, ot.E2);
p2i = mesh.AddVertex(interp);
hashMap.SetHashValue(p2x, p2y, p2z,e2i ,p2i);
}
else
{
p2i = index;
} Triangle t = new Triangle(p0i, p1i, p2i);
mesh.AddFace(t);
} protected virtual Point3d GetIntersetedPoint(int cx,int cy,int cz, int ei)
{
int p0i = EdgeIndexToEdgeVertexIndex[ei, 0];
int p1i = EdgeIndexToEdgeVertexIndex[ei, 1]; int p0X = cx+PointIndexToPointDelta[p0i].X;
int p0Y = cy + PointIndexToPointDelta[p0i].Y;
int p0Z = cz + PointIndexToPointDelta[p0i].Z; int p1X = cx + PointIndexToPointDelta[p1i].X;
int p1Y = cy + PointIndexToPointDelta[p1i].Y;
int p1Z = cz + PointIndexToPointDelta[p1i].Z; return new Point3d((p0X+p1X)/2.0f,(p0Y+p1Y)/2.0f,(p0Z+p1Z)/2.0f);
} protected virtual bool IsInsideIsoSurface(int x,int y,int z)
{
return bmp.data[x+ w * y + wh * z] == BitMap3d.WHITE;
} protected virtual bool InRange(int x, int y, int z)
{
if (x < w && x >= 0
&& y < h && y >= 0
&& z < d && z >= 0)
{
return true;
}
return false;
}
}
效率对比
使用用Phantom数据,对其抽取MC/SMC等值面,其中MC/SMC算法分别采用堆砌二维数组与本文的设计,其效率对比如下表所示。
|
算法 |
MC(堆砌) |
MC(本文) |
SMC(堆砌) |
SMC(本文) |
|
时间 |
10211ms |
6772ms |
8235ms |
5104ms |
工程下载
采用此方法实现的算法代码可在如下地址下载:
MC:https://github.com/chnhideyoshi/OctreeBaseSimplifiedMarchingCubes/tree/master/MarchingCubes
SMC:https://github.com/chnhideyoshi/OctreeBaseSimplifiedMarchingCubes/tree/master/SimplifiedMarchingCubes
博主注:在项目:https://github.com/chnhideyoshi/OctreeBaseSimplifiedMarchingCubes增加了C++版本的MC/SMC算法实现。具体项目目录为:
MC(C++):https://github.com/chnhideyoshi/OctreeBaseSimplifiedMarchingCubes/tree/master/MarchingCubesCp
爬网的太疯狂了,转载本文要注明出处啊:http://www.cnblogs.com/chnhideyoshi/
一种适合于MC与SMC算法的哈希表设计的更多相关文章
- 【算法】哈希表的诞生(Java)
参考资料 <算法(java)> — — Robert Sedgewick, Kevin Wayne <数据结构> ...
- Java数据结构和算法之哈希表
五.哈希表 一般的线性表.树中,记录在结构中的相对位置是随机的即和记录的关键字之间不存在确定的关系,在结构中查找记录时需进行一系列和关键字的比较.这一类查找方法建立在“比较”的基础上,查找的效率与比较 ...
- [算法导论]哈希表 @ Python
直接寻址方式: class HashTable: def __init__(self, length): self.T = [None for i in range(length)] class Da ...
- 算法复习——哈希表+折半搜索(poj2549)
搬讲义~搬讲义~ 折半搜索感觉每次都是打暴力时用的啊2333,主要是用于降次··当复杂度为指数级别时用折半可以减少大量复杂度··其实专门考折半的例题并不多···一般都是中途的一个小优化··· 然后折半 ...
- java数据结构和算法09(哈希表)
树的结构说得差不多了,现在我们来说说一种数据结构叫做哈希表(hash table),哈希表有是干什么用的呢?我们知道树的操作的时间复杂度通常为O(logN),那有没有更快的数据结构?当然有,那就是哈希 ...
- 【Google设计冲刺】一种适合于创新小组的协作方式
传统的产品闭环是1.产品策划-2.研发-3.上线-4.等待市场反馈,4个步骤.对于一个创新项目来说,试错成本过高,等待周期过长[注释1].那么,有没有一种适合创新项目的协作方式呢?谷歌风投杰克·纳普发 ...
- 两种方法实现Python二分查找算法
两种方法实现Python二分查找算法 一. ? 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 arr=[1,3,6,9,10,20,30] def findnumber( ...
- [小专题]另一种字符串匹配的思路——Shift-And算法
吐槽:前两天打组队赛遇到一个字符串的题考了这个(见:http://acm.hdu.edu.cn/showproblem.php?pid=5972 ) 当时写了个KMP瞎搞然后TLE了(害),赛后去查了 ...
- 算法:哈希表格(Hash Table)
背景 Java 和 .Net 平台都有一个所有引用类型都会间接或直接继承的类型:Object,这个类型提供最基本的相等性比较算法和哈希算法,很多书上都给出了在重写这两个算法的时候的主意事项,其中大多数 ...
随机推荐
- navigationItem的leftBarButtonItem和rightBarButtonItem隐藏
- (void)showEdit { if (不符合显示条件) { self.navigationItem.rightBarButtonItem.customView.hidden = YES; // ...
- Windows服务器java.exe占用CPU过高问题分析及解决
最近在测试一个用java语言实现的数据采集接口时发现,接口一旦运行起来,CPU利用率瞬间飙升到85%-95%,一旦停止就恢复到40%以下,这让我不得不面对以前从未关注过的程序性能问题. 在硬着头皮查找 ...
- java 整型
byte(1字节).short(2字节).int(4字节).long(16字节) java中前缀加上0b或者0B就可以写二进制数,前缀加上0就可以写八进制数,前缀加上0x或者0X就可以写十六进制数 一 ...
- 云原生时代之Kubernetes容器编排初步探索及部署、使用实战-v1.22
概述 **本人博客网站 **IT小神 www.itxiaoshen.com Kubernetes官网地址 https://kubernetes.io Kubernetes GitHub源码地址 htt ...
- YC-Framework版本更新:V1.0.2
分布式微服务框架:YC-Framework版本更新V1.0.2!!! 版本更新,本次版本为V1.0.2 主要更新内容如下所示: 集成ActiveMQ; 集成微信生态(支持微信公众号.微信支付.微信开放 ...
- GIS应用|快速开发在线路径导航应用
导航应用可用于路径规划及仿真,并且常作为一个重要模块融入到各类企业管理业务中,如面向物流管理.商品配送.车辆监控等场景,那么如何开发一个简单的在线路径导航应用呢?SuperMap Online为您解答 ...
- Python解释器下载安装
一.简介 吉多·范罗苏姆(Guido van Rossum)在1989年的圣诞节期间,编写能够解释Python语言语法的解释器. 解释器版本 第一个数字是大版本号 数字不同功能上可能会有很大差异 py ...
- java 多线程:Thread类;Runnable接口
1,进程和线程的基本概念: 1.什么是进程: 进程(Process)是计算机中的程序关于某数据集合上的一次运行活动,是系统进行资源分配和调度的基本单位,是操作系统结构的基础.在早期面向进程设计的计算机 ...
- python爬取信息到数据库与mysql简单的表操作
python 爬取豆瓣top250并导入到mysql数据库中 import pymysql import requests import re url='https://movie.douban.co ...
- reducer在react使用
编写store.js 小state reducer 怎么来 纯函数 state+action 生成新的state actions type return{ } state action === s ...