强化学习之CartPole
0x00 任务
通过强化学习算法完成倒立摆任务,控制倒立摆在一定范围内摆动。
0x01 设置jupyter登录密码
jupyter notebook --generate-config
jupyter notebook password (会输入两次密码,用来验证)
jupyter notebook 登录
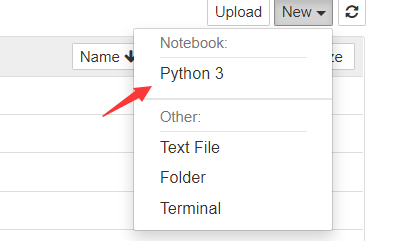
0x02 创建python note
0x03 代码
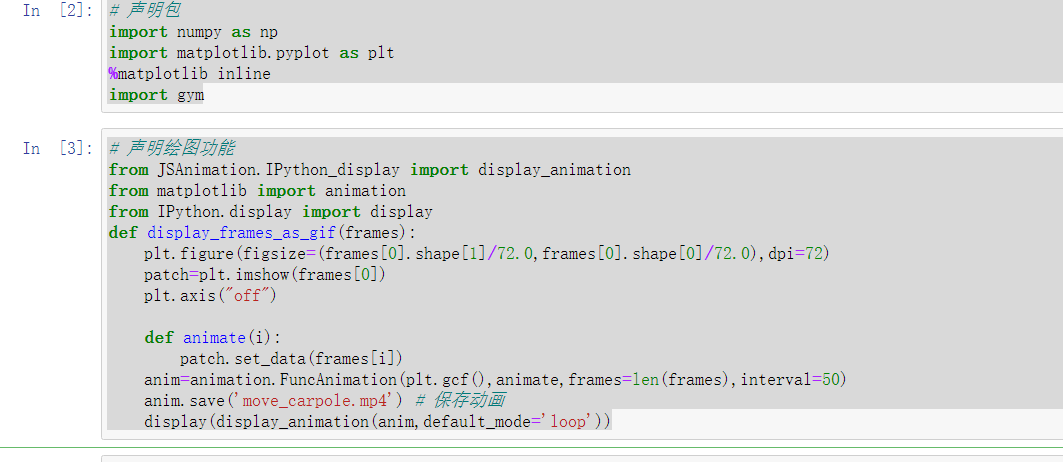
# 声明包
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inline
import gym
# 声明绘图功能
from JSAnimation.IPython_display import display_animation
from matplotlib import animation
from IPython.display import display
def display_frames_as_gif(frames):
plt.figure(figsize=(frames[0].shape[1]/72.0,frames[0].shape[0]/72.0),dpi=72)
patch=plt.imshow(frames[0])
plt.axis("off")
def animate(i):
patch.set_data(frames[i])
anim=animation.FuncAnimation(plt.gcf(),animate,frames=len(frames),interval=50)
anim.save('move_carpole.mp4') # 保存动画
display(display_animation(anim,default_mode='loop'))
# 随机移动CartPole
frames=[]
env=gym.make('CartPole-v0')
observation=env.reset() # 重置环境
for step in range(0,200):
frames.append(env.render(mode='rgb_array')) # 加载各个时刻图像到帧
action=np.random.choice(2) # 随机返回: 0 小车向左,1 小车向右
gym.logger.set_level(40)
observation,reward,done,info=env.step(action) # 执行动作
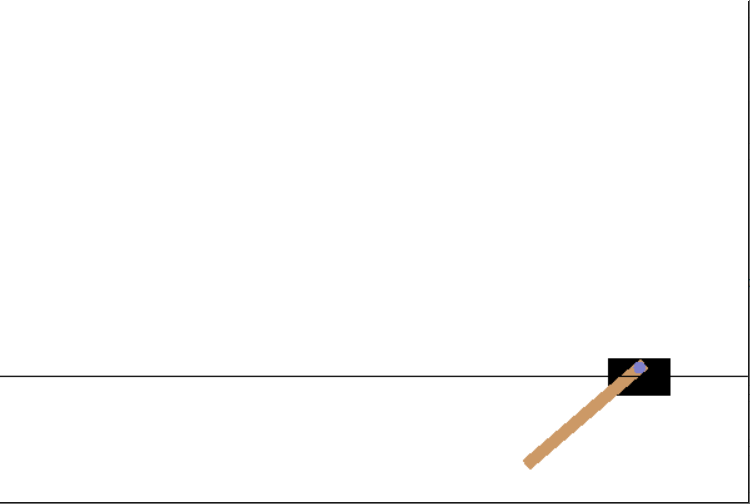
运行后
移动 Caprpole的代码并不重要,重要的是最后一行observation,reward,done,info=env.step(action)
reward 是 即时奖励,若执行了action后,小车位置在+-2.4范围之内而且杆的倾斜成都没有超过20.9°,则设置奖励为1.相反,若小车移出+-2.4范围或者杆倾斜超过了20.9°的话,则奖励为0。退出时 done是一个变量。若为结束状态 则为true
这里代码忽略了done, info变量保存调试信息。
最后使用display_frames_as_gif(frames) 函数去保存我们的gif
# 保存并绘制视频
display_frames_as_gif(frames)

可正常保存视频
CartPole的状态
之前讨论的迷宫问题中,状态指的是每个格子的编号,由单个变量表示,0~8,然而倒立摆具有更复杂的状态定义。
CartPole的状态存储在observation中,变量observarion是4个变量组成的列表,每个变量的内容如
小车位置 -2.4~2.4
小车速度 -∞~+∞
杆的角度 -41.8°~+41.8°
杆的角速度 -∞~+∞
因为变量是连续值,如果想要通过表格的形式来表达Q函数,就需要将他们进行离散化
比如使用0~5来标记变量的连续值
-2.4~-1.6=0
-1.6~-0.8=1
依次类推
则总共有6的4次方总组合 1296种类型 数字 表示 CartPole的状态
而这个时候小车的方向只有向左和向右
所以,可以用1296行x2列的表格来表示Q函数
算法实现
- 变量设置
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inline
import gym
# 变量设定
ENV='CartPole-v0' # 设置任务名
NUM_DIZITIZED=6 # 设置离散值个数
# 尝试运行 CartPole
env=gym.make(ENV) # 设置要执行的任务
observarion=env.reset() # 环境初始化
- 求取用于离散化的阙值
# 求取用于离散化的阙值
def bins(clip_min,clip_max,num):
return np.linespace(clip_min,clip_max,num+1)[1:-1] # 返回[-1.6,-0.8,0,0,0.8,1.6]
-∞~-1.6=0 -1.6~0.8=1
依次类推
- 创建函数 根据获得的阙值对连续变量进行离散化
def digitize_state(observation):
cart_pos,cart_v,pole_angle,pole_v=observation
digitized=[
np.digitize(cart_pos,bins=bins(-2.4,2.4,NUM_DIZITIZED)),
np.digitize(cart_v,bins=bins(-3.0,3.0,NUM_DIZITIZED)),
np.digitize(pole_angle,bins=bins(-0.5,0.5,NUM_DIZITIZED)),
np.digitize(pole_v,bins=bins(-2.0,2.0,NUM_DIZITIZED))
]
return sum([x*(NUM_DIZITIZED)**i) for i,x in enumerate(digitized)])
以6进制进行计算 如果 存在一个离散值(1,2,3,4) 则求得当前状态值为 160+2*61+362+4*63=985

- Q学习实现
这里需要定义实现类,主要有三个类 Agent Brain 和 Environmet
Agent类表示小推车对象,主要有2个函数,更新Q函数,和确定下一步动作函数
Agent中有一个Brain类的对象作为成员变量。
Brain类可认为是Agent的大脑,通过Q表来实现Q学习,主要有4个函数 bin digitize_state 用来离散化Agent观察到的observation
函数update_Q_table来更新Q表
函数decision_action 来确定来自Q表的动作。
为什么需要将Agent和Brain类分开》? 因为如果使用深度强化学习,将表格型Q改成深度强化学习时只需要改变Brain类就行了。
Environment类是OpenAI Gym的执行环境,执行CartPole环境的是run函数
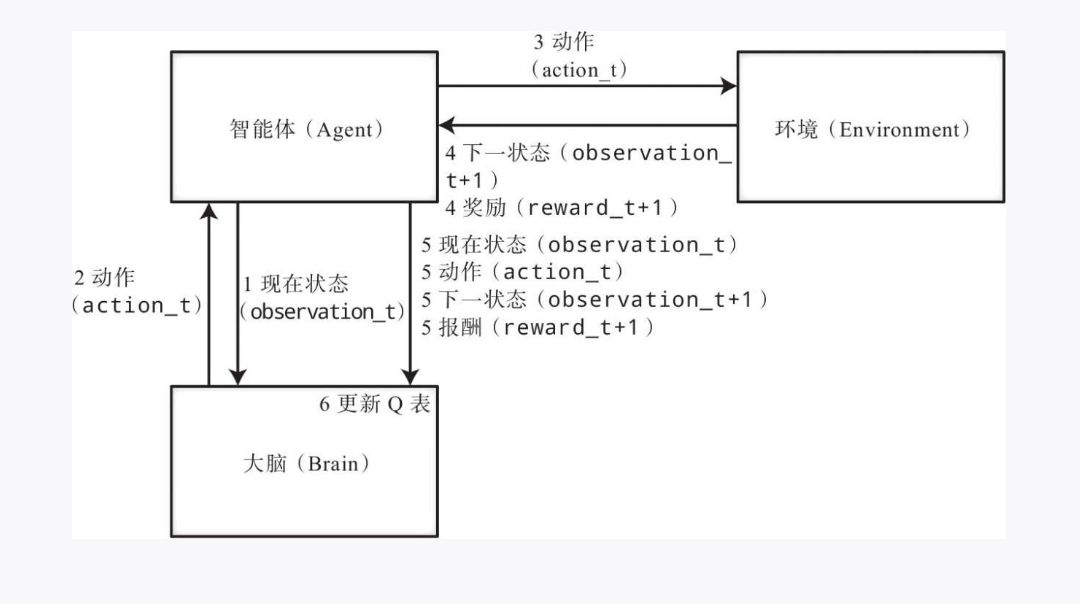
- start
首先我们需要决定要执行的值动作,所以 Agent将当前状态 observation_t传给Brain ,Brain 离散化状态再根据Q表来确定动作,并将确定的动作返回给Agent,
之后是动作的实际执行环境步骤,Agent将动作action_t传递给Environment,Environment执行动作action_t并将执行后的状态observation_t+1和即时奖励 reward+1 返回给Agent
再更新Q 表, Agent将当前状态observation_t 执行动作 action_t 和执行动作后的observation_t+1 即时奖励reward_t+1传回给Brain,Brain更新Q表,这4个变量综合起来被称为transition
之后 重复该过程就行了,因为获得最大价值的方式只有一种,所以通过Q学习不断拟合,最后会形成唯一解。
0x04 强化学习之Q学习的原理(重点!)-》瞬间开悟
观察代码 self.q_table[state,action]=self.q_table[state,action]+ETA(reward+GAMMAMax_Q_next-self.q_table[state,action]) ,刚开始看时,一脸懵逼,直到想通了某个点。
首先我们需要清楚在大量的数据面前,能够满足我们想要的最好的策略 只有一条,有些时候我们可以自己求得该策略,比如迷宫问题,我们可以轻松做到,这里的倒立摆问题我们也能轻松做到,但是小球消方块呢? 我们人类几乎不能在很短时间做出判断,然后消除掉所有的方块,但是机器能。为什么?
满足最优策略只有一条,大数据训练只是为了让我们的策略最终拟合成为最优策略
还是拿这段代码来说 self.q_table[state,action]=self.q_table[state,action]+ETA(reward+GAMMAMax_Q_next-self.q_table[state,action]) Q表的更新是当前Q表+变化值。
所以Q表的更新量其实就是 ETA*(reward+GAMMA*Max_Q_next-self.q_table[state,action])
ETA是学习率。 reward是奖励,这里可以认为是0, GAMMA是时间折扣率为0.99 接近为1 self.q_table[state,action] 为当前Q表,记录了当前状态和当前的方向。
当我们设置变化值为很小时,最终实现Q表几乎不变,此时Q表代表了我们的最优策略。 但是为什么,为什么它就能拟合到最优,而不是别的?每次拟合的过程是什么?
抽象概念
我们可以假设有1000多个大的游泳池,我们设定的阙值范围用游泳圈来表示,水的体积来表示数据范围,策略可用来表示水体积的变化。第一个游泳池我们随机生成,游泳池里灌满了水,游泳圈的数量固定,当我们的智能体根据当前策略进行了运动,而我们定义的策略是如果到达我们的目标则获得奖励,抽象到游泳池可以认为是,我们从第一个游泳池跳到第二个游泳池的游泳圈范围里。当我们这样做后会得到奖励,因为奖励的存在,使得我们不断往游泳圈跳来获得最大价值,在一,二,三的泳池中,
强化学习之CartPole的更多相关文章
- 【转载】 深度强化学习处理cartpole为什么reward很难超过200?
原贴地址: https://www.zhihu.com/question/266493753 一直在看强化学习方面的内容,cartpole是最简单的入门实验环境,最原始的评判标准是连续100次epis ...
- 强化学习 CartPole实验的一些启发 有没有可能设计一个新的实验呢?(杆子可以向360度方向倾倒,可行吗?)
最近在看强化学习方面的东西,突然想到了这么一个事情,那就是经典的CartPole游戏我们改变一下,或者说升级一下,那么使用强化学习是否能得到不错的效果呢? 原始游戏如图: 一点个人的想法: ===== ...
- 强化学习(十六) 深度确定性策略梯度(DDPG)
在强化学习(十五) A3C中,我们讨论了使用多线程的方法来解决Actor-Critic难收敛的问题,今天我们不使用多线程,而是使用和DDQN类似的方法:即经验回放和双网络的方法来改进Actor-Cri ...
- 强化学习(十五) A3C
在强化学习(十四) Actor-Critic中,我们讨论了Actor-Critic的算法流程,但是由于普通的Actor-Critic算法难以收敛,需要一些其他的优化.而Asynchronous Adv ...
- 强化学习(九)Deep Q-Learning进阶之Nature DQN
在强化学习(八)价值函数的近似表示与Deep Q-Learning中,我们讲到了Deep Q-Learning(NIPS 2013)的算法和代码,在这个算法基础上,有很多Deep Q-Learning ...
- 【转载】 强化学习(九)Deep Q-Learning进阶之Nature DQN
原文地址: https://www.cnblogs.com/pinard/p/9756075.html ------------------------------------------------ ...
- 强化学习之Q-learning简介
https://blog.csdn.net/Young_Gy/article/details/73485518 强化学习在alphago中大放异彩,本文将简要介绍强化学习的一种q-learning.先 ...
- Ubuntu下常用强化学习实验环境搭建(MuJoCo, OpenAI Gym, rllab, DeepMind Lab, TORCS, PySC2)
http://lib.csdn.net/article/aimachinelearning/68113 原文地址:http://blog.csdn.net/jinzhuojun/article/det ...
- 基于Keras的OpenAI-gym强化学习的车杆/FlappyBird游戏
强化学习 课程:Q-Learning强化学习(李宏毅).深度强化学习 强化学习是一种允许你创造能从环境中交互学习的AI Agent的机器学习算法,其通过试错来学习.如上图所示,大脑代表AI Agent ...
随机推荐
- UVA11427玩纸牌(全概率+递推)
题意: 一个人玩纸牌游戏,他每天最多玩n局,枚举获胜的概率是a/b,每天玩牌只要获胜概率达到p,那么他今天就不玩了,明天接着玩,如果有一天他的概率没有达到p,(没有达到p的话他今天一定是玩 ...
- Hack The Box - Archetype
攻略的话在靶场内都有,也有官方的攻略,我作为一个技术小白,只是想把自己的通关过程记录下来,没有网站内大佬们写得好 我们获得了一个IP: 尝试访问了一下,应该不存在web页面: 对常规端口进行一个扫描: ...
- angularjs中的常遇问题整理
1.页面中默认图片的显示 {{img || "/upload/img.png"}} 2.接口中的数据没有及时读取到,$apply $.post( url, {}, function ...
- 一些代码小技巧&经典代码
请说明逻辑与(&&)在下边表达式中起到的重要作用 count != 0 && sum/count 答:该表达式使用逻辑与(&&)来确保 sum/coun ...
- 04.06 UCF Local Programming Contest 2017
A.Electric Bill 题意:简单计算题,超过1000部分额外算 1 #include<stdio.h> 2 int main(){ 3 int money1,money2; 4 ...
- .Net Core导入千万级数据至Mysql
最近在工作中,涉及到一个数据迁移功能,从一个txt文本文件导入到MySQL功能. 数据迁移,在互联网企业可以说经常碰到,而且涉及到千万级.亿级的数据量是很常见的.大数据量迁移,这里面就涉及到一个问题 ...
- MSSQL·备份数据库中的单表
阅文时长 | 0.11分钟 字数统计 | 237.6字符 主要内容 | 1.引言&背景 2.声明与参考资料 『MSSQL·备份数据库中的单表』 编写人 | SCscHero 编写时间 | 20 ...
- [OS] 操作系统课程(五)
系统启动 启动过程 CPU加电稳定后从0XFFFF0读取第一条指令 BIOS 固化到计算机主板上的程序 包括系统设置.自检程序和系统自启动程序 系统加电后读BIOS 加电自检POST,内存.显卡等关键 ...
- date命令月日时分年
# date +%Y/%m/%d2019/09/29[root@a-3e5 lpts-20190910-keyan-v0.2]# date +%H:%M20:00
- Linux占用swap分区过高,物理内存还有剩余
Linux占用swap分区过高,物理内存还有剩余 问题分析 Swap配置对性能的影响 分配太多的Swap空间会浪费磁盘空间,而Swap空间太少,则系统会发生错误.如果系统的物理内存用光了,系统就会跑得 ...