[pixhawk笔记]8-半物理仿真环境
通过半物理仿真,可以在不试飞的情况下对飞控的软硬件进行部分验证,下面结合文档对半物理仿真环境的搭建和运行进行学习。先跑起来再说。
Pixhawk支持多轴和固定翼的仿真,多轴用jMavSim,固定翼用XPlane或者FlightGear。
本文主要学习用jMavSim进行多轴仿真的。
官网教程给出的是先打开jMavSim进行连接,再打开QGC,但是前提是你已经在QGC里设置好了Pixhawk,所以本文从设置开始。
- 打开QGroundControl
按官网教程需要设置,笔者发现用QGC做四轴的HIL仿真时无需设置HIL的源,只需在选择Airframe时选择HIL并校准遥控器和操纵模式即可。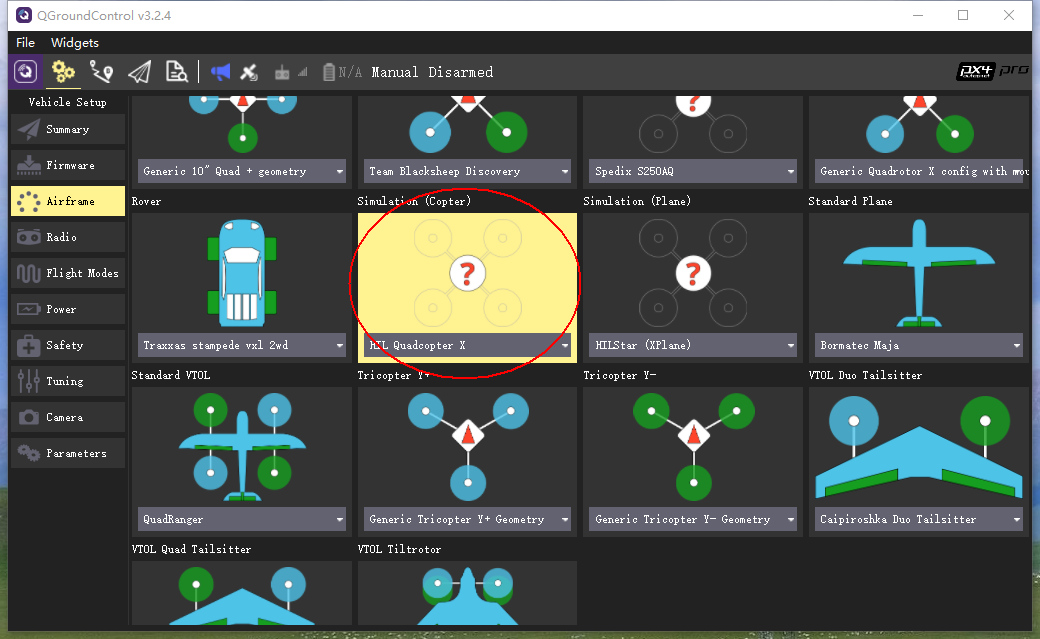
按照机架选择HIL Quadcopter X,然后校准Radio并设置FlightMode,然后退出QGC并重启飞控。
- 启动jMavSim
确保QGroundControl没有运行,连接飞控,启动jMavSim./Tools/jmavsim_run.sh -q -d /dev/ttyACM0 -b 921600 -r 250
启动后界面如下:

- 运行HIL仿真
出现Init MAVLink字样证明已经连接上飞控,然后打开QGC,用遥控器和QGC来操作无人机。则在jMAVSim中可以显示无人机的运行视景。
[pixhawk笔记]8-半物理仿真环境的更多相关文章
- 【探索之路】机器人篇(5)-Gazebo物理仿真环境搭建_让机器人运动起来
如果完成了前两步,那么其实我们已经可以去连接我们的现实中的机器人了. 但是,做机器人所需要的材料还没有到,所以我们这里先在电脑平台上仿真一下.这里我们用到的就算gazebo物理仿真环境,他能很好的和R ...
- 基于 Mathematica 的机器人仿真环境(机械臂篇)[转]
完美的教程,没有之一,收藏学习. 目的 本文手把手教你在 Mathematica 软件中搭建机器人的仿真环境,具体包括以下内容(所使用的版本是 Mathematica 11.1,更早的版本可能缺少某些 ...
- 【黑金原创教程】【Modelsim】【第四章】激励文本就是仿真环境
声明:本文为黑金动力社区(http://www.heijin.org)原创教程,如需转载请注明出处,谢谢! 黑金动力社区2013年原创教程连载计划: http://www.cnblogs.com/ ...
- UIDynamic(物理仿真)
简介 什么是UIDynamic UIDynamic是从iOS 7开始引入的一种新技术,隶属于UIKit框架 可以认为是一种物理引擎,能模拟和仿真现实生活中的物理现象 如: 重力.弹性碰撞等现象 物理引 ...
- 搭建Modelsim SE仿真环境-使用do文件仿真
本章我们介绍仿真环境搭建是基于Modelsim SE的.Modelsim有很多版本,比如说Modelsim-Altera,但是笔者还是建议大家使用Modelsim-SE,Modelsim-Altera ...
- [pixhawk笔记]4-如何写一个简单的应用程序
本文主要内容来自于:https://dev.px4.io/en/tutorials/tutorial_hello_sky.html,并对文档中的部分问题进行更正. 本文假设已经建立好开发环境并能正确编 ...
- kvm虚拟化学习笔记(一)之kvm虚拟化环境安装
平时一直玩RHEL/CentOS/OEL系列的操作,玩虚拟化也是采这一类系统,kvm在RHEL6系列操作系统支持比较好,本文采用采用OEL6.3操作系统,网上所有文章都说KVM比xen简单,我怎么感觉 ...
- 【.NET6+Modbus】Modbus TCP协议解析、仿真环境以及基于.NET实现基础通信
前言:随着工业化的发展,目前越来越多的开发,从互联网走向传统行业.其中,工业领域也是其中之一,包括各大厂也都在陆陆续续加入工业4.0的进程当中. 工业领域,最核心的基础设施,应该是与下位硬件设备或程序 ...
- Swift学习笔记(一)搭配环境以及代码运行成功
原文:Swift学习笔记(一)搭配环境以及代码运行成功 1.Swift是啥? 百度去!度娘告诉你它是苹果最新推出的编程语言,比c,c++,objc要高效简单.能够开发ios,mac相关的app哦!是苹 ...
随机推荐
- Codevs 5914 [SXOI2016]最大值
70分算法+30分打表 #include<ctime> #include<cstdio> #include<cstdlib> #include<algorit ...
- SVN备份及恢复
一,SVN备份 svnadmin dump /data/svn/blzfmima/ > /tmp/full.svn.bak 其中/data/svn/blzfmima/为svn文件夹,导出成一个备 ...
- org.hibernate.ObjectDeletedException: deleted object would be re-saved by cascade 解决方案 (网络转载)
前提是配置了cascade=all,依然报这种错误,其实出现这个错误的大多数情况根本不是像网上的帖子所说的是什么级联删除的问题,而且hibernate session关于实体生命周期操作的原因,这里明 ...
- 不想分页怎么办??-->页面数据的滚动加载
在前几天的一次前台数据展示的时候 为了更好的用户的体验 就想着做一个数据的滚动加载功能 于是简单的查询了网上的实现方式 基本都是在页面加载的时候绑定scroll事件 然后判断页面触底的时候 进行aja ...
- inode file 结构
inode位图(inode Bitmap) 和块位图类似,本身占一个块,其中每个bit表示一个inode是否空闲可用. inode表(inode Table) 我们知道,一个文件除了数据需要存储之外, ...
- Storm-源码分析-Topology Submit-Nimbus-mk-assignments
什么是"mk-assignment", 主要就是产生executor->node+port关系, 将executor分配到哪个node的哪个slot上(port代表slot, ...
- [译]关于JavaScript 作用域你想知道的一切
原文连接 在学习js的过程对闭包什么的,理解不好,偶然搜到这篇文章.豁然开朗,随翻译. Javacript 中有一系列作用域的概念.对于新的JS的开发人员无法理解这些概念,甚至一些经验丰富的开发者也未 ...
- Android 关于异步Http请求,以及编码问题
大家都知道可以使用一个继承了AsyncTask的类去实现异步操作,再有个Http请求的类就可以解决了,现在我说下里面的细节问题,比如长时间无反应,编码问题,以及一些HTML相关的处理. 首先说下长时间 ...
- 剑指Offer——矩阵中的路径
题目描述: 请设计一个函数,用来判断在一个矩阵中是否存在一条包含某字符串所有字符的路径.路径可以从矩阵中的任意一个格子开始,每一步可以在矩阵中向左,向右,向上,向下移动一个格子.如果一条路径经过了矩阵 ...
- 确定比赛名次---hdu1285(拓扑排序)
题目链接:http://acm.hdu.edu.cn/showproblem.php?pid=1285 拓扑序就是求一个序列 数 a 出现在数 b 前面,最终输出满足条件的序列即可: 过程就是每次选取 ...