【目标检测+域适应】CVPR18 CVPR19总结
域适应已经是一个很火的方向了,目标检测更不用说,二者结合的工作也开始出现了,这里我总结了CVPR18和CVPR19的相关论文,希望对这个交叉方向的近况有一个了解。
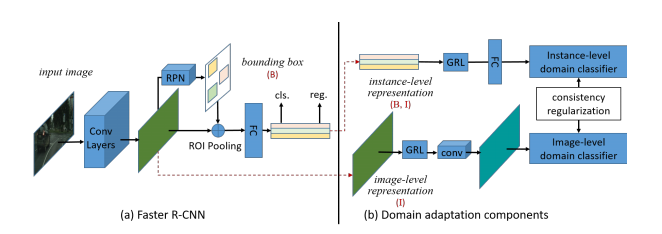
1. 2018_CVPR Domain Adaptive Faster R-CNN for Object Detection in the Wild
这篇可算是第一个工作,以faster rcnn为baseline,在其基础上添加判别器分支,附着到backbone输出的特征图和roi提取到的向量上,前者代表图像级别的域适应,后者代表物体级别的域适应(roi代表一个物体),分别训练两个判别器,使其无法区分两个域的图像,除此之外,还添加了一致性正则化损失项,保证两个层面的域分类结果一致。特别说明,源域数据没有标签,所以没有检测器的损失,只有域判别器的损失,所以最后的损失项:源域的检测器损失+源域的物体域判别损失+源域的图像域判别损失+源域的物体图像一致性损失+目标域的物体判别损失+目标域的图像判别损失+目标域的物体图像一致性损失
相关代码:
https://github.com/yuhuayc/da-faster-rcnn(官方 caffe)
https://github.com/krumo/Detectron-DA-Faster-RCNN(caffe2)
https://github.com/divyam02/dafrcnn-pytorch/tree/cleaning(pytorch)
https://github.com/tiancity-NJU/da-faster-rcnn-PyTorch (pytorch)
2. 2018_CVPR Cross-Domain Weakly-Supervised Object Detection through Progressive Domain Adaption
这篇文章似乎出自东京大学?日本的科研能力依然世界前列啊。文章的任务设定与UDA(无监督域适应)略有不同,这篇文章处理的任务中,目标域有图像级标注(图像中有哪几类物体),没有实例级标注,所以文章的题目也说了,本文是弱监督任务。
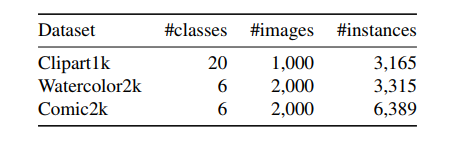
这篇文章不能只介绍方法了,因为它还有另一大贡献,那就是深度学习最为倚重的数据集,作者直接制作了三个数据集,而且都有实例级标注,太赞了!,这是不小的工作量。
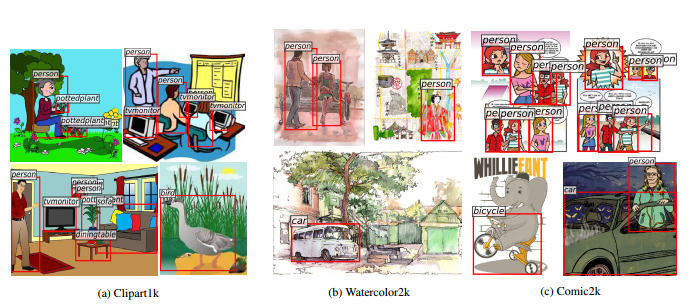
三个数据集都是卡通风格的,与自然图像相比域差异可以说是相当大了,分别是Clipart1K,Comic2K,Watercolor2K,从名字可以看出分别是1000,2000,2000张图片。
具体样子如下,说实话在我看来长的都差不多,为什么选择这几个数据集,可能日本人对漫画有天分和执着吧
说到方法,其实这篇论文的方法就是finetune,跟域适应的路子不太一样,没有域判别器之类的东西,然而,目标域没有实例标签,无法微调,所以作者想了两种方法产生可用来微调的数据-标签对。
1.在源域数据训练检测器
2. 利用cyclegan,将源域数据转换为目标域,然后微调
3. 对目标域数据生成伪标签,继续微调

cyclegan的方法无需多说,详情还得看cyclegan的东西,目标域生成伪标签的原理是用检测器检测出结果,然后只保留图像级标注中存在的物体类别,最后针对剩下的物体类,只取每一类中概率最高的一个检测结果,这样做是想尽量减少错误标注带来的影响吧
相关代码:
https://github.com/naoto0804/cross-domain-detection
3. 2019_CVPR Automatic adaptation of object detectors to new domains using self-training
这篇文章是跟上一篇有相同之处的,那就是都不是常规的域适应的路子,也是微调。不过本文没有用cyclegan生成假样本,只是采用了伪标签。相比于仅利用检测器生成伪标签,本文还利用跟踪器生成伪标签,跟踪器?没错,本文的伪标签数据来自视频,当然训练好的检测器可以用于视频也可用于图像。其中,跟踪器的作用是查缺补漏,以防检测器漏掉某些目标。
论文的贡献不止于上面的,另一个贡献在于对伪标签的处理,使用了软化的技术,软标签,具体内容不想讲了,只是记得如果要使用伪标签,可以考虑借鉴这篇论文的软标签处理方式。
相关代码:http://vis-www.cs.umass.edu/unsupVideo/
4. 2019_CVPR Strong-Weak Distribution Alignment for Adaptive Object Detection
这篇文章采用的是常规的域适应的路子,只是采用了foca loss,效果出奇的好
由于采用的是域适应的路子,可以与第一篇文章做一下比较,第一篇文章是在图像级和实例级两个层面进行域适应,而这篇文章是在低层次特征和高层次特征两个层面进行域适应,没有利用目标信息,只是在图像层面的域适应。
具体而言,选取两个特征图,一个层次低,一个层次高(backbone的最后特征图),接下来的思想是我比较认同的,在低层次特征进行强对齐,也就是标准的交叉熵损失,在高层次特征进行部分对齐(弱对齐),如何达到弱对齐,就是采用focal loss,降低易分类样本的损失权重,然后本文的核心东西就没了,思路简单,效果好
我觉得低层次编码的是域相关信息,比如cityscape和foggy cityscape,差别在于后者有雾,这是一个图像风格的问题,会在低层次进行编码,当然,低层次特征还包含物体的边,角等信息,而高层次特征编码语义信息,对于两个域而言,语义可能相同也可能不同,不该一味地强制语义对齐,所以采取弱对齐是合理的
相关代码:https://github.com/VisionLearningGroup/DA_Detection
5. 2019_CVPR Few-shot Adaptive Faster R-CNN
这篇文章是关于少样本学习的,这个方向不太了解,但是文章主要做的还是目标检测和域适应,要解决的问题是目标域只有少量样本的情况,但是目标域有标签,不是无监督的
它也是在图像级和实例级两个层面进行域适应,但是由于目标域样本少,作者采取了一种成对机制,具体来说,源域的特征图(图像级)切分成若干patch,与目标域的若干patch进行组队,按照两种方式组队,源域patch和源域patch,源域patch和目标域patch,然后训练分类器,这样可训练的样本就增多了,对于实例级也是同样策略,这就是这篇文章的核心思想。
相关代码: 尚未找到
6. 2019_CVPR Adapting Object Detectors via Selective Cross-Domain Alignment
这篇论文完全就是针对CVPR18李文的那篇,完全一样的三组实验,然后全部吊打,太惨了
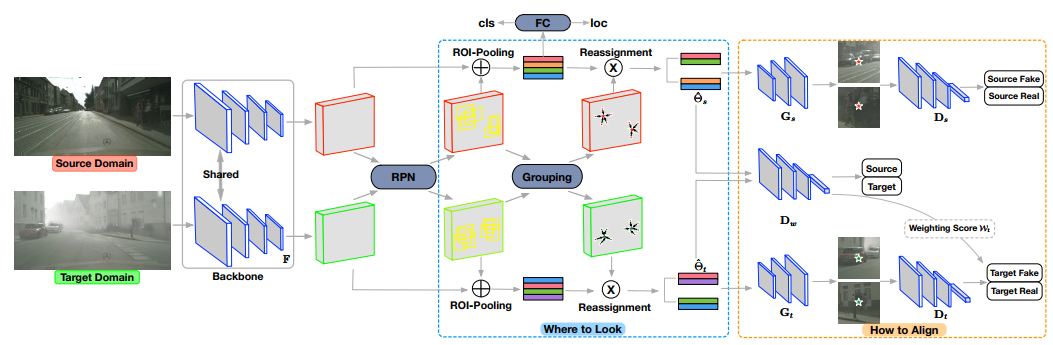
其实这篇论文的想法很合理,切中要害,文章只采用实例级对齐,但是抓住了实例对齐的问题,那就是RPN生成的proposal不准确,这种情况对不准确的区域对齐,产生的结果肯定是受干扰的
于是论文分两步走,第一步找到需要对齐的区域,第二步,对齐
具体来说,对RPN生成的若干proposal, 聚类成K个proposal,认为这K个聚类中心更有可能包含目标,我觉得这还是有道理的
接下来的操作就有些看不到懂了,对K个proposal的特征,进行重构,变成一张图片,这张生成的图片与K个proposal所在区域的真实图片,进行判别,这样就完成了两个域的适应?
我觉得讲不大清楚,上图吧,坦白讲,第一步我深表赞同,第二步摸不着头脑
相关代码:尚未找到
7. 2019_CVPR Towards Universal Object Detection by Domain Attention
这篇论文的思路跟上面所有的都不一样,其他人是进行域适应,在源域学习到的知识用于目标域,而这篇的目标是设计一个检测器,同时检测多个域,方法不是很新奇,就是多个域的数据都送入一个网络训练,当然,论文引入了注意力机制,SEnet等比较时髦的东西,其他的没什么好说的了。
相关代码:https://github.com/xuw080/towards-universal-objects-detection(目前似乎只有项目地址,还没放出代码)
8. 2019_CVPR Diversify and Match:A Domain Adaptive Representation Learning Paradigm for Object Detection
这篇论文我觉得很好,做法很简单,确实是,但是简单有效啊
说的直白点就是数据增强,但是增强的方式很有意思
利用cycle-gan在源域和目标域间生成多个中间域图像,跟源域共享一个标签,这样,可训练的数据就增多了,这些新的数据与源域和目标域一起送入faster rcnn,源域与新图像会计算检测loss,然后所有图像一起会送入域分类器,不同于通常的域适应中的域判别器,这里的分类器不是二分类,是多分类,最终的目的是希望学习到多个域之间的不变特征
至于多个新图像的产生细节,还是跟cycle-gan有关,添加不同的loss,产生不同风格的图像,具体得看论文了。

相关代码:尚未找到
然后对这些方法中的实验结果做个比对
【目标检测+域适应】CVPR18 CVPR19总结的更多相关文章
- AI佳作解读系列(五) - 目标检测二十年技术综述
计算机视觉中的目标检测,因其在真实世界的大量应用需求,比如自动驾驶.视频监控.机器人视觉等,而被研究学者广泛关注. 上周四,arXiv新出一篇目标检测文献<Object Detection ...
- CVPR 2019 论文解读 | 小样本域适应的目标检测
引文 最近笔者也在寻找目标检测的其他方向,一般可以继续挖掘的方向是从目标检测的数据入手,困难样本的目标检测,如检测物体被遮挡,极小人脸检测,亦或者数据样本不足的算法.这里笔者介绍一篇小样本(few ...
- Domain Adaptive Faster R-CNN:经典域自适应目标检测算法,解决现实中痛点,代码开源 | CVPR2018
论文从理论的角度出发,对目标检测的域自适应问题进行了深入的研究,基于H-divergence的对抗训练提出了DA Faster R-CNN,从图片级和实例级两种角度进行域对齐,并且加入一致性正则化来学 ...
- 旷世提出类别正则化的域自适应目标检测模型,缓解场景多样的痛点 | CVPR 2020
论文基于DA Faster R-CNN系列提出类别正则化框架,充分利用多标签分类的弱定位能力以及图片级预测和实例级预测的类一致性,从实验结果来看,类该方法能够很好地提升DA Faster R-CNN系 ...
- CVPR2019目标检测论文看点:并域上的广义交
CVPR2019目标检测论文看点:并域上的广义交 Generalized Intersection over Union Generalized Intersection over Union: A ...
- 目标检测 — one-stage检测(二)
one-stage检测算法,其不需要region proposal阶段,直接产生物体的类别概率和位置坐标值,经过单次检测即可直接得到最终的检测结果,因此有着更快的检测速度,比较典型的算法如YOLO,S ...
- 目标检测之人头检测(HaarLike Adaboost)---高密度环境下行人检测和统计
实验程序视频 下载 1 问题描述 高密度环境下的行人统计一直没有得到很好的解决,主要原因是对高密度人群中的行人检测和跟踪是一个很难的问题,如下图所示环境,存在的困难包括: 检测方面: 由于人群整体处于 ...
- CVPR2020|3D-VID:基于LiDar Video信息的3D目标检测框架
作者:蒋天园 Date:2020-04-18 来源:3D-VID:基于LiDar Video信息的3D目标检测框架|CVPR2020 Brief paper地址:https://arxiv.org/p ...
- CVPR2020论文解读:3D Object Detection三维目标检测
CVPR2020论文解读:3D Object Detection三维目标检测 PV-RCNN:Point-Voxel Feature Se tAbstraction for 3D Object Det ...
随机推荐
- 洛谷 P1140 相似基因 ( 线性DP || 类LCS )
题意 : 题目链接 分析 : 可以观察到给出的配对代价表中对角线部分是正数 其余的都是负数,也就是说让相同字母的匹配的越多越好 即找出 LCS 但是这里 DP 的过程需要记录一下代价 有关 LCS ...
- UML——用例视图
用例视图中交互功能部分被称为用例. 参与者 作为外部用户与系统发生交互作用,这是参与者的特征. 在系统的实际运作中,一个实际用户可能对应系统的多个参与者.不同的用户也可以只对应于一个参与者,从 ...
- [LightOJ1008]Fibsieve`s Fantabulous Birthday 题解
前言 扫了一眼网上的题解,都是找规律. 估计就我一个蒟蒻在打二分. 题解 设一个" ┐"形为一层. 我们二分查找该数在那一层,然后就可以直接计算它的位置了. 代码 #include ...
- k8s安装报错 Error: unknown flag: --experimental-upload-certs
今天安装k8sV1.16的版本时候,执行突然发现命令不对,之前安装V1.15的时候是可以的,可能是版本升级的原因. 解决: unknown flag: --experimental-upload-ce ...
- 网页结构树DOM
引入 window对象 所有浏览器都支持 window 对象.它表示浏览器窗口. *如果文档包含框架(frame 或 iframe 标签),浏览器会为 HTML 文档创建一个 window 对象,并为 ...
- psdash-为开发、测试人员提供简单的方法,在web界面查看服务器的运行情况(网络,带宽,磁盘,CPU), 同时可以在web界面查看日志
psdash是linux的系统信息web指示板主要由使用数据psutil——由此得名. github地址:https://github.com/Jahaja/psdash 特性 安装 开始 配置 截图 ...
- 【canvas学习笔记八】像素操作
ImageData对象 ImageData对象包含了一个区域内的canvas的像素信息.它包含以下可读属性: width canvas的宽度,单位是像素. height canvas的高度,单位是像素 ...
- 记一次CTF实验吧的代码审计
0X01 0X01 Burp抓包找到hint 访问地址看源码 <?php $info = ""; $req = []; $flag="xxxxxxxxxx" ...
- [LeetCode]-DataBase-Department Highest Salary
The Employee table holds all employees. Every employee has an Id, a salary, and there is also a colu ...
- Failed to read artifact descriptor for xxx:jar
在MyEclipse中执行Maven的install命令时,报“Failed to read artifact descriptor for xxx:jar ”的错误.这可能是在下载过程中文件出现错误 ...