JPS/JPS+ 寻路算法
概念
JPS(jump point search)算法实际上是对A* 寻路算法的一个改进,因此在阅读本文之前需要先了解A*算法。
A* 算法在扩展节点时会把节点所有邻居都考虑进去,这样openlist中点的数量会很多,搜索效率较慢。
例如在无遮挡情况下(往往会有多条等价路径),而我们希望起点到终点实际只取其中一条路径,而该路径外其它节点可以没必要放入openlist(不希望加入没必要的邻居)。

其次我们还希望直线方向上中途的点不用放入openlist,如果只放入每段直线子路径的起点和终点,那openlist又可以少放很多没必要的节点:

可以看到 JPS 算法搜到的节点总是“跳跃性”的,这是因为这些关键性的节点都是需要改变行走方向的拐点,因此这也是 Jump Point 命名的来历。
在介绍JPS等算法具体实现前,我们必须先掌握下面的概念。
强迫邻居(Forced Neighbour)
强迫邻居:节点 x 的8个邻居中有障碍,且 x 的父节点 p 经过x 到达 n 的距离代价比不经过 x 到达的 n 的任意路径的距离代价小,则称 n 是 x 的强迫邻居。
看定义也许十分晦涩难懂。直观来说,实际就是因为前进方向(父节点到 x 节点的方向为前进方向)的某一边的靠后位置有障碍物,因此想要到该边靠前的空位有最短的路径,就必须得经过过 x 节点。
可能的情况见图示,黑色为障碍,红圈即为强迫邻居:
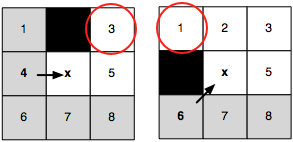
(左图为直线方向情况下的强迫邻居,右图为斜方向情况下的强迫邻居)
跳点(Jump Point)
跳点:当前点 x 满足以下三个条件之一:
- 节点 x 是起点/终点。
- 节点 x 至少有一个强迫邻居。
- 如果父节点在斜方向(意味着这是斜向搜索),节点x的水平或垂直方向上有满足条件a,b的点。
节点y的水平或垂直方向是斜向向量的拆解,比如向量d=(1,1),那么水平方向则是(1,0),并不会往左搜索,只会看右边,如果向量d=(-1,-1),那么水平方向是(-1,0),只会搜索左边,不看右边,其他同理。
下图举个例子,由于黄色节点的父节点是在斜方向,其对应分解成向上和向右两个方向,因为在右方向发现一个蓝色跳点,因此黄色节点也应被判断为跳点:

JPS 寻路算法(Jump Point Search)
实现原理
JPS 算法和A* 算法非常相似,步骤大概如下:
- openlist取一个权值最低的节点,然后开始搜索。(这些和A*是一样的)
- 搜索时,先进行 直线搜索(4/8个方向,跳跃搜索),然后再 斜向搜索(4个方向,只搜索一步)。如果期间某个方向搜索到跳点或者碰到障碍(或边界),则当前方向完成搜索,若有搜到跳点就添加进openlist。
跳跃搜索是指沿直线方向一直搜下去(可能会搜到很多格),直到搜到跳点或者障碍(边界)。一开始从起点搜索,会有4个直线方向(上下左右),要是4个斜方向都前进了一步,此时直线方向会有8个。
- 若斜方向没完成搜索,则斜方向前进一步,重复上述过程。
因为直线方向是跳跃式搜索,所以总是能完成搜索。
- 若所有方向已完成搜索,则认为当前节点搜索完毕,将当前节点移除于openlist,加入closelist。
- 重复取openlist权值最低节点搜索,直到openlist为空或者找到终点。
下面结合图片更好说明过程2和3:首先我们从openlist取出绿色的节点,作为搜索的开始,先进行直线搜索,再斜向搜索,没有找到任何跳点。

斜方向前进一步后,重复直线搜索和斜向搜索过程,仍没发现跳点。

斜方向前进两步后,重复直线搜索和斜向搜索过程,仍没发现跳点。

斜方向前进了三步后(假设当前位置为 x),在水平直线搜索上发现了一个跳点(紫色节点为强迫邻居)。

于是 x 也被判断为跳点,添加进openlist。斜方向结束,绿色节点的搜索过程也就此结束,被移除于openlist,放入closelist。

示例过程
下面展示JPS算法更加完整的过程:
假设起点为绿色节点,终点为红色节点。

重复直线搜索和斜向搜索过程,斜方向前进了3步。在第3步判断出黄色节点为跳点(依据是水平方向有其它跳点),将黄色跳点放入openlist,然后斜方向搜索完成,绿色节点移除于openlist,放入closelist。

对openlist下一个权值最低的节点(即黄色节点)开启搜索,在直线方向上发现了蓝色节点为跳点(依据是紫色节点为强迫邻居),类似地,放入openlist。
由于斜方向还没结束,继续前进一步。最后一次直线搜索和斜向搜索都碰到了边界,因此黄色节点搜索完成,移除于openlist,放入closelist。

对openlist下一个权值最低的节点(原为蓝色节点,下图变为黄色节点)开启搜索,直线搜索碰到边界,斜向搜索无果。斜方继续前进一步,仍然直线搜索碰到边界,斜向搜索无果。

由于斜方向还没结束,继续前进一步。

最终在直线方向上发现了红色节点为跳点,因此蓝色节点先被判断为跳点,只添加蓝色节点进openlist。斜方向完成,黄色节点搜索完成。

最后openlist取出的蓝色节点开启搜索,在水平方向上发现红色节点,判断为终点,算法完成。
回忆起跳点的第三个判断条件(如果父节点在斜方向,节点x的水平或垂直方向上有满足条件a,b的点),会发现这个条件判断是最复杂的。在寻路过程中,它使寻路多次在水平节点上搜到跳点,也只能先添加它本身。其次,这也是算法中需要使用到递归的地方,是JPS算法性能瓶颈所在。
JPS+(Jump Point Search Plus)
JPS+ 本质上也是 JPS寻路,只是加上了预处理来改进,从而使寻路更加快速。
预处理
我们首先对地图每个节点进行跳点判断,找出所有主要跳点:

然后对每个节点进行跳点的直线可达性判断,并记录好跳点直线可达性:

若可达还需记录号跳点直线距离:

类似地,我们对每个节点进行跳点斜向距离的记录:

剩余各个方向如果不可到达跳点的数据记为0或负数距离。如果在对应的方向上移动1步后碰到障碍(或边界)则记为0,如果移动n+1步后会碰到障碍(或边界)的数据记为负数距离-n
最后每个节点的8个方向都记录完毕,我们便完成了JPS+的预处理过程:

以上预处理过程需要有一个数据结构存储地图上每个格子8个方向距离碰撞或跳点的距离。
示例过程
做好了地图的预处理之后,我们就可以使用JPS+算法了。大致思路与JPS算法相同,不过这次有了预处理的数据,我们可以更快的进行直线搜索和斜向搜索。
在某个搜索方向上有:
- 对于正数距离 n(意味着距离跳点 n 格),我们可以直接将n步远的节点作为跳点添加进openlist
- 对于0距离(意味着一步都不可移动),我们无需在该方向搜索;
- 对于负数距离 -n(意味着距离边界或障碍 n 格),我们直接将n步远的节点进行一次跳点判断(有可能满足跳点的第三条件,不过得益于预处理的数据,这步也可以很快完成)。
如下图示,起始节点通过已记录的向上距离,直接将3步远的跳点添加进openlist,而不再像以前需要迭代三步(还每步都要判断是否跳点):

其它过程也是类似的:




总结
可以看到 JPS/JPS+ 算法里只有跳点才会被加入openlist里,排除了大量不必要的点,最后找出来的最短路径也是由跳点组成。这也是 JPS/JPS+ 高效的主要原因。
JPS :
- 绝大部分地图,使用 JPS 算法都会比 A* 算法更快,内存占用也更小(openlist里节点少了很多)。
- JPS 在跳点判断上,要尽可能避免递归的深度过大(或者期待一下以后出现避免递归的算法),否则在超大型的地图里递归判断跳点可能会造成灾难。
- JPS 也可以用于动态变化的地图,只是每次地图改变都需要再进行一次 JPS 搜索。
- JPS 天生拥有合并节点(亦或者说是在一条直线里移除中间不必要节点)的功能,但是仍存在一些可以继续合并的地方。
- JPS 只适用于 网格(grid)节点类型,不支持 Navmesh 或者路径点(Way Point)。
JPS+ :
- JPS+ 相比 JPS 算法又是更快上一个档次(特别是避免了过多层递归判断跳点),内存占用则是每个格子需要额外记录8个方向的距离数据。
- JPS+ 算法由于包含预处理过程,这让它面对动态变化的地图有天生的劣势(几乎是不可以接受动态地图的),因此更适合用于静态地图。
- JPS+ 预处理的复杂度为 \(O(n)\) ,n 代表地图格子数。
| 算法 | 性能 | 内存占用 | 支持动态地图 | 预处理 | 支持节点类型 |
|---|---|---|---|---|---|
| A* | 中等 | 大 | 支持 | 无 | 网格、Navmesh、路径点 |
| JPS | 快 | 偏小 | 支持 | 无 | 网格 |
| JPS+ | 非常快 | 中等 | 不支持 | 有,\(O(n)\) | 网格 |
综上,JPS/JPS+ 是A*算法的优秀替代者,绝大部分情况下更快和更小的内存占用已经足够诱人。在GDC 2015 关于 JPS+ 算法的演讲中,Steve Rabin 给出的数据甚至是比A* 算法快70~350倍。
参考
[1] 从头理解JPS寻路算法 - 简书 by ElephantKing
[2] JPS+: Over 100x Faster than A* | GDC 2015
[3] JPS+ with GoalBounding C++实现,和上面GDC2015的演讲人是同一个人 Steve Rabin。
[4] 一个在线可视化的JPS实现附说明 A Visual Explanation Of Jump Point Search
JPS/JPS+ 寻路算法的更多相关文章
- 寻路算法A*, JPS(跳点搜索)的一些杂谈
A*是一个比较经典的启发式寻路算法.是基于dijkstra算法,但是加入了启发函数,使路径搜索效率更高.实现起来很简单.不过要做到通用性高,比如支持各种不同类型的地图,甚至不仅仅是地图,而是个图结构如 ...
- 寻路算法之A*算法详解
前言 在实际开发中我们会经常用到寻路算法,例如MMOARPG游戏魔兽中,里面的人物行走为了模仿真实人物行走的体验,会选择最近路线达到目的地,期间会避开高山或者湖水,绕过箱子或者树林,直到走到你所选定的 ...
- A星寻路算法介绍
你是否在做一款游戏的时候想创造一些怪兽或者游戏主角,让它们移动到特定的位置,避开墙壁和障碍物呢? 如果是的话,请看这篇教程,我们会展示如何使用A星寻路算法来实现它! 在网上已经有很多篇关于A星寻路算法 ...
- A*寻路算法探究
A*寻路算法探究 A*算法常用在游戏的寻路,是一种静态网路中求解最短路径的搜索方法,也是解决很多搜索问题的算法.相对于Dijkstra,BFS这些算法在复杂的搜索更有效率.本文在U3D中进行代码的测试 ...
- A*寻路算法
对于初学者而言,A*寻路已经是个比较复杂的算法了,为了便于理解,本文降低了A*算法的难度,规定只能横竖(四方向)寻路,而无法直接走对角线,使得整个算法更好理解. 简而言之,A*寻路就是计算从起点经过该 ...
- 算法:Astar寻路算法改进,双向A*寻路算法
早前写了一篇关于A*算法的文章:<算法:Astar寻路算法改进> 最近在写个js的UI框架,顺便实现了一个js版本的A*算法,与之前不同的是,该A*算法是个双向A*. 双向A*有什么好处呢 ...
- 算法:Astar寻路算法改进
早前写了一篇<RCP:gef智能寻路算法(A star)> 出现了一点问题. 在AStar算法中,默认寻路起点和终点都是N x N的方格,但如果用在路由上,就会出现问题. 如果,需要连线的 ...
- js实现A*寻路算法
这两天在做百度前端技术学院的题目,其中有涉及到寻路相关的,于是就找来相关博客进行阅读. 看了Create Chen写的理解A*寻路算法具体过程之后,我很快就理解A*算法的原理.不得不说作者写的很好,通 ...
- 用简单直白的方式讲解A星寻路算法原理
很多游戏特别是rts,rpg类游戏,都需要用到寻路.寻路算法有深度优先搜索(DFS),广度优先搜索(BFS),A星算法等,而A星算法是一种具备启发性策略的算法,效率是几种算法中最高的,因此也成为游戏中 ...
随机推荐
- 【学习】Python os模块常用方法 记录
记录一些工作中常用到的用法 os.walk() 模块os中的walk()函数可以遍历文件夹下所有的文件. os.walk(top, topdown=Ture, onerror=None, follow ...
- 已解决[Authentication failed for token submission,Illegal hexadecimal charcter s at index 1]
在初次学习使用shiro框架的时候碰到了这个问题,具体报错情况如下: [org.apache.shiro.authc.AbstractAuthenticator] - Authentication f ...
- Mysql基础(二)
多表连接 #多表查询 /* sql99标准 等值连接 ①多表等值连接的结果为多表的交集部分 ② n个连接至少需要 n-1个连接 ③一般需要为表起别名 ④可以搭配前面介绍的所有子句的使用,比如排序,分组 ...
- 【MOOC操作系统】测试题大题-进程调度 先入先服务算法例题 【某多道程序系统供用户使用的主存为100K,磁带机2台,打印机1台,采用可变分区存储管理,静态方式分配外围设备(进程获得所需全部设备才能进入内容),忽略用户作业的I/O时间。采用动态分区、首次匹配法(从低地址区开始)分配主存,一个作业创建一个进程,且运行中不紧缩内存。作业调度采用FCFS算法,在主存中的进程采用剩余时间最短调度算法。】
分析图: 答案: (1) 8 : 00作业1到达,占有资源并调入主存运行. 8: 20作业2和3同时到达,但作业2因分不到打印机,只能在后备队列等待.作业3资源满足,可进主存运行,并与作业1平分CPU ...
- nginx配置https及Android客户端访问自签名证书
前一篇随笔通过keytool生成keystore并为tomcat配置https,这篇随笔记录如何给nginx配置https.如果nginx已配置https,则tomcat就不需要再配置https了.通 ...
- 【译】Welcome to C# 9.0
C# 9.0正在形成,我想分享我们对添加到该语言下个版本的一些主要功能的看法.对于每个新版本的 C#,我们努力使常见的编码方案更加清晰和简单,C# 9.0 也不例外.这次的一个特别重点是支持数据形状的 ...
- Rocket - config - Parameters
https://mp.weixin.qq.com/s/uLEr9gAFaMDIXa8S9xJVTw 介绍配置类Parameters及其伴生对象的实现. 参考链接: https://docs.q ...
- Chisel3 - Tutorial - Adder4
https://mp.weixin.qq.com/s/X5EStKor2DU0-vS_wIO-fg 四位加法器.通过FullAdder级联实现. 参考链接: https://github.co ...
- 【Linux】ntp服务-时间同步
ntp简易安装与时间同步 yum -y install ntp ntpdate //安装ntp服务 ntpdate cn.pool.ntp.org //更新时间 hwclock --systohc / ...
- Java实现 蓝桥杯VIP 基础练习 时间转换
问题描述 给定一个以秒为单位的时间t,要求用"h️s" 的格式来表示这个时间.H表示时间,M表示分钟,而s表示秒,它们都是整数且没有前导的"0".例如,若t=0 ...