Eigen::Matrix与array数据转换
1. 数组转化为Eigen::Matrix
int array[]; cout << "colMajor matrix = \n" << Map<Matrix3i>(array) << endl; // map a contiguous array as a column-major matrix
cout << "rowMajor matrix = \n" << Map<Matrix<int, , , RowMajor>>(array) << endl; // map a contiguous array as a row-major matrix Map<MatrixXi> eigMat1(array, , ); // eigMat1和array指向的是同一个内存空间,是绑定在一起的
MatrixXi eigMat2 = Map<MatrixXi>(array, , ); // eigMat1和array指向不同的内存空间,互不影响
2. Eigen::Matrix转化为数组
Matrix3d eigMat; double* eigMatptr = eigMat.data();
double* eigMatptrnew = new double[eigMat.size()];
Map<MatrixXd>(eigMatptrnew, eigMat.rows(), eigMat.cols()) = eigMat;
3.更多转化
下面的代码是我写的互相转化的测试
#include <iostream>
#include <vector>
#include <Eigen/Dense> using namespace std;
using namespace Eigen; void array2eigenMat();
void eigenMat2array(); void array2eigenVec();
void eigenVec2array(); void vector2eigenMat();
void eigenMat2vector(); void vector2eigenVec();
void eigenVec2vector(); int main()
{
cout << "hello world" <<endl;
array2eigenMat();
eigenMat2array(); array2eigenVec();
eigenVec2array(); vector2eigenMat();
eigenMat2vector(); vector2eigenVec();
eigenVec2vector();
return ;
} void array2eigenMat()
{
cout << "-------------------------- array2eigenMat --------------------------" << endl; int array[];
for (int i = ; i < ; ++i) array[i] = i;
cout << "array = [ "; for (int i = ; i < ; ++i) cout << array[i] << " "; cout << "]" << endl; cout << "colMajor matrix = \n" << Map<Matrix3i>(array) << endl; // map a contiguous array as a column-major matrix
cout << "rowMajor matrix = \n" << Map<Matrix<int, , , RowMajor>>(array) << endl; // map a contiguous array as a row-major matrix cout << "stride matrix = \n" << Map<MatrixXi, , OuterStride<>>(array, , , OuterStride<>()) << endl;
//mapping an array while specifying an outer stride. Here, since we're mapping as a column-major matrix,
// 'outer stride' means the pointer increment between two consecutive columns Map<MatrixXi> eigMat1(array, , );
MatrixXi eigMat2 = Map<MatrixXi>(array, , );
array[] = ; cout << "eigMat1 matrix = \n"; cout << eigMat1 << endl;
cout << "eigMat2 matrix = \n"; cout << eigMat2 << endl;
cout << "---------------------------------------------------------------------" << endl; }
void eigenMat2array()
{
cout << "-------------------------- eigenMat2array --------------------------" << endl;
Matrix3d eigMat;
eigMat <<
, , ,
, , ,
, , ;
cout << "init eigMat = \n"; cout << eigMat << endl; double* eigMatptr = eigMat.data();
cout << "array = [ "; for (int i = ; i < ; ++i) cout << eigMatptr[i] << " "; cout << "]" << endl; eigMat(, ) = ;
cout << "array = [ "; for (int i = ; i < ; ++i) cout << eigMatptr[i] << " "; cout << "]" << endl; double *eigMatptrnew = new double[eigMat.size()];
Map<MatrixXd>(eigMatptrnew, eigMat.rows(), eigMat.cols()) = eigMat; eigMat(, ) = ;
cout << "init matrix = \n"; cout << eigMat << endl;
cout << "array = [ "; for (int i = ; i < ; ++i) cout << eigMatptr[i] << " "; cout << "]" << endl;
cout << "---------------------------------------------------------------------" << endl;
} void array2eigenVec()
{
cout << "-------------------------- array2eigenVec --------------------------" << endl; int array[];
for (int i = ; i < ; ++i) array[i] = i;
cout << "data array = [ "; for (int i = ; i < ; ++i) cout << array[i] << " "; cout << "]" << endl; Map<VectorXi> eigVec(array, );
cout << "eigen vector transpose = " << eigVec.transpose() << endl;
cout << "stride vector transpose = " << Map<VectorXi, , InnerStride<> >(array, ).transpose() << endl;
// map an array as a vector, specifying an inner stride, that is, the pointer increment between two consecutive coefficients array[] = ;
cout << "eigen vector transpose = " << eigVec.transpose() << endl;
cout << "stride vector transpose = " << Map<VectorXi, , InnerStride<> >(array, ).transpose() << endl; cout << "---------------------------------------------------------------------" << endl;
}
void eigenVec2array()
{
cout << "-------------------------- eigenVec2array --------------------------" << endl;
VectorXf eigvec();
eigvec << , , , , ;
cout << "eigen vector transpose = " << eigvec.transpose() << endl; float *array = new float;
array = eigvec.data();
cout << "data array = [ "; for (int i = ; i < eigvec.size(); ++i) cout << array[i] << " "; cout << "]" << endl; eigvec() = ;
cout << "data array = [ "; for (int i = ; i < eigvec.size(); ++i) cout << array[i] << " "; cout << "]" << endl; array[] = ;
cout << "eigen vector transpose = " << eigvec.transpose() << endl; cout << "---------------------------------------------------------------------" << endl;
} void vector2eigenMat()
{
cout << "-------------------------- vector2eigenMat --------------------------" << endl;
vector<int> stdvec{ , , , , , , , , };
Map<Matrix<int, , , RowMajor>> eigMat1(stdvec.data());
MatrixXi eigMat2 = Map<Matrix<int, , , RowMajor>>(stdvec.data()); cout << "eigMat1 matrix = \n"; cout << eigMat1 << endl;
cout << "eigMat2 matrix = \n"; cout << eigMat2 << endl; stdvec[] = ;
cout << "eigMat1 matrix = \n"; cout << eigMat1 << endl;
cout << "eigMat2 matrix = \n"; cout << eigMat2 << endl; cout << "---------------------------------------------------------------------" << endl;
}
void eigenMat2vector()
{
cout << "-------------------------- eigenMat2vector --------------------------" << endl;
Matrix3d eigMatCol;
eigMatCol <<
, , ,
, , ,
, , ;
cout << "eigen matrix col = \n"; cout << eigMatCol << endl;
vector<double> stdvec1(eigMatCol.data(), eigMatCol.data() + eigMatCol.size());
cout << "std vector1 = ["; for (int i = ; i < stdvec1.size(); ++i) cout << stdvec1[i] << " "; cout << "]" << endl; Matrix<double, , , RowMajor> eigMatRow = eigMatCol;
cout << "eigen matrix row = \n"; cout << eigMatCol << endl;
vector<double> stdvec2(eigMatRow.data(), eigMatRow.data() + eigMatRow.size());
cout << "std vector2 = ["; for (int i = ; i < stdvec2.size(); ++i) cout << stdvec2[i] << " "; cout << "]" << endl; cout << "---------------------------------------------------------------------" << endl;
} void vector2eigenVec()
{
cout << "-------------------------- vector2eigenVec --------------------------" << endl;
vector<int> stdvec{ , , , , };
cout << "std vector = ["; for (int i = ; i < stdvec.size(); ++i) cout << stdvec[i] << " "; cout << "]" << endl; Map<VectorXi> eigVec1(stdvec.data(), stdvec.size());
VectorXi eigVec2 = Map<VectorXi>(stdvec.data(), stdvec.size());
cout << "eigen vector1 transpose = " << eigVec1.transpose() << endl;
cout << "eigen vector2 transpose = " << eigVec2.transpose() << endl;
cout << "stride vector transpose = " << Map<VectorXi, , InnerStride<> >(stdvec.data(), ).transpose() << endl; stdvec[] = ;
cout << "eigen vector1 transpose = " << eigVec1.transpose() << endl;
cout << "eigen vector2 transpose = " << eigVec2.transpose() << endl; cout << "stride vector transpose = " << Map<VectorXi, , InnerStride<> >(stdvec.data(), ).transpose() << endl; cout << "---------------------------------------------------------------------" << endl;
}
void eigenVec2vector()
{
cout << "-------------------------- eigenVec2vector --------------------------" << endl;
VectorXf eigvec();
eigvec << , , , , ;
cout << "eigen vector transpose = " << eigvec.transpose() << endl; vector<float> stdvec(eigvec.data(), eigvec.data() + eigvec.size());
cout << "std vector = ["; for (int i = ; i < stdvec.size(); ++i) cout << stdvec[i] << " "; cout << "]" << endl; eigvec() = ;
cout << "std vector = ["; for (int i = ; i < stdvec.size(); ++i) cout << stdvec[i] << " "; cout << "]" << endl;
cout << "---------------------------------------------------------------------" << endl;
}
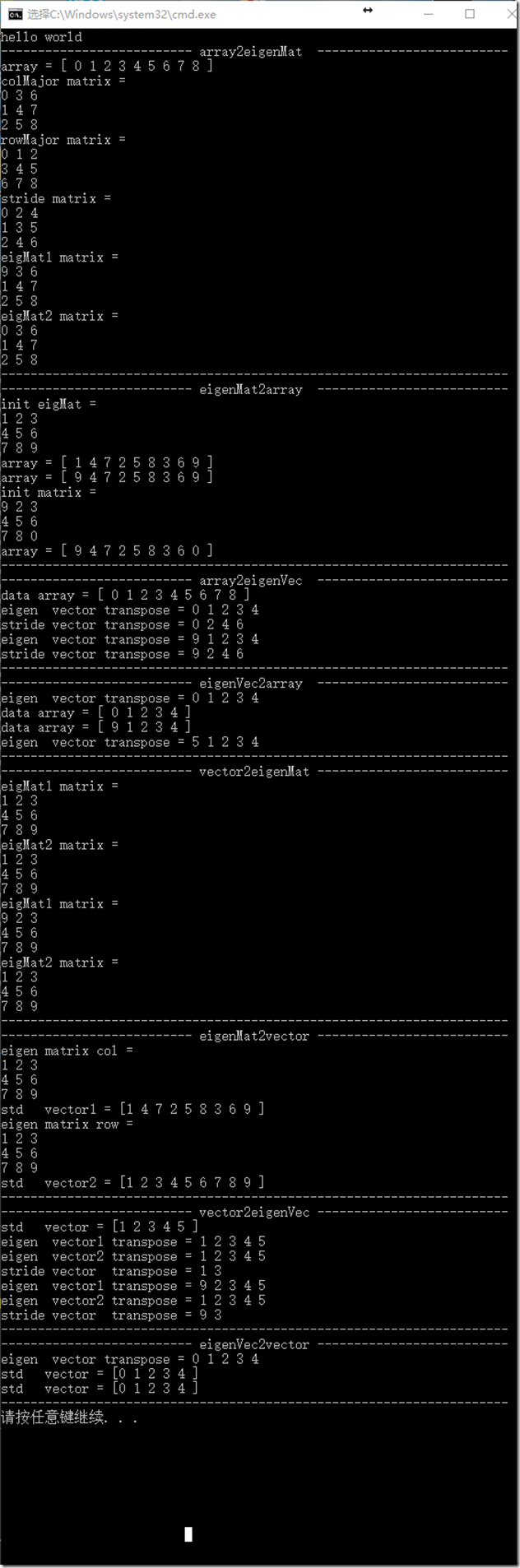
程序运行结果
4. 参考
1. Eigen::Map
2. Eigen quick reference guide
3. Vlad's Blog
Eigen::Matrix与array数据转换的更多相关文章
- Eigen学习之Array类
Eigen 不仅提供了Matrix和Vector结构,还提供了Array结构.区别如下,Matrix和Vector就是线性代数中定义的矩阵和向量,所有的数学运算都和数学上一致.但是存在一个问题是数学上 ...
- eigen Matrix详解
Eigen Matrix 详解 在Eigen中,所有的matrices 和vectors 都是模板类Matrix 的对象,Vectors 只是一种特殊的矩阵,行或者列为1. Matrix的前三个模板参 ...
- numpy中的matrix与array的区别
Numpy matrices必须是2维的,但是 numpy arrays (ndarrays) 可以是多维的(1D,2D,3D····ND). Matrix是Array的一个小的分支,包含于Array ...
- Numpy中matrix()和array()的区别
matrix() 和 array() 的区别,主要从以下方面说起: 1. 矩阵生成方式不同 import numpy as np a1 = np.array([[1, 2], [3, 4]]) b1 ...
- Python与线性代数——Numpy中的matrix()和array()的区别
Numpy中matrix必须是2维的,但是 numpy中array可以是多维的(1D,2D,3D····ND).matrix是array的一个小的分支,包含于array.所以matrix 拥有arra ...
- 73. Set Matrix Zeroes (Array)
Given a m x n matrix, if an element is 0, set its entire row and column to 0. Do it in place. Follow ...
- 59. Spiral Matrix II (Array)
Given an integer n, generate a square matrix filled with elements from 1 to n2 in spiral order. For ...
- Joint Approximative Diagonalization of Eigen matrix (JADE)
特征矩阵联合相似对角化算法[1]. Cardoso于1993年提出的盲信号分离具有代表性的一种算法.是一种基于四阶累积量特征矩阵近似联合对角化盲分离算法.该算法将目标函数最大化问题等价于一组四阶累积量 ...
- array和matrix
array:数组 matrix:矩阵 list:列表 a = [[1,2,3],[4,5,6]] 两种array的定义方式,第一种方式可以看出list不是array,但却有很大的联系 a = np.a ...
随机推荐
- ADT SDK Manager启动时一闪而过
原因为使用了Android Studio的绿色JRE,必须要安装安装版JDK或者JRE,绿色版JRE放在ADT目录虽然能启动ADT但是不能启动SDK Manager
- 存储引擎和表的操作(mysql中的数据类型、完整性约束)
一.存储引擎 .概念 MySQL中的数据用各种不同的技术存储在文件(或者内存)中.这些技术中的每一种技术都使用不同的存储机制.索引技巧.锁定水平并且最终提供广泛的不同的功能和能力. 通过选择不同的技术 ...
- Centos 32位 安装 NodeJS
准备命令: yum -y install gcc make gcc-c++ openssl-devel wget 下载源码及解压: wget https://nodejs.org/dist/v6.9. ...
- SD第九届省赛B题 Bullet
Bullet Time Limit: 1000 ms Memory Limit: 65536 KiB Submit Statistic Discuss Problem Description In G ...
- SQL Server 2008还原数据库时出现“备份集中的数据库备份与现有的数据库不同”的解决方法
引言 现在在做项目,由于每个人是分模块的,所以大家的测试数据都不同步,导致好多时候会因为别人填的数据不同而调半天的错.所以我还是自己还原一个数据库,自己填自己的数据吧. 报错 之前还原过很多个数据库都 ...
- Python多进程与单进程效率对比
运行环境:Python3 in win10 先生成200个测试文件 # generate.py i = 0 while i < 200: o = open("test\\" ...
- C++回顾day02---<继承相关问题>
一:继承和组合混搭时,构造和析构调用原则 (一)先构造父类,再构造成员变量,最后构造自己 (二)先析构自己,再析构成员变量,最后父类析构(方向与构造相反) class A { public: int ...
- Entity Framework入门教程(12)--- EF进行批量添加/删除
EF6添加了批量添加/删除实体集合的方法,我们可以使用DbSet.AddRange()方法将实体集合添加到上下文,同时实体集合中的每一个实体的状态都标记为Added,在执行SaveChange()方法 ...
- 第十六节:语法总结(3)(C#6.0和C#7.0新语法)
一. C# 6.0 新语法 1. 自动属性初始化可以赋值 /// <summary> /// 自动属性初始化 /// </summary> public class UserI ...
- SpringBoot系列: 设计Restful风格的API
RESTful 架构REST 并非一种技术或规范, 而是一种架构风格, 如果一个架构符合Rest的约束条件和原则, 就可以称作是 RESTful 架构. REST全称是Representational ...