ORB-SLAM(五)优化
ORB-SLAM作为单目SLAM,其精度很大程度上决定于帧与帧之间的位姿优化的是否准确。因此优化(optimization)在ORB-SLAM里面扮演了很重要的角色。这一小节探讨一下ORB-SLAM里用到的优化。
ORB-SLAM选用g2o作为图优化的方法,关于g2o可以参考http://www.cnblogs.com/gaoxiang12/p/5304272.html。
一、为什么要优化
因为摄像机标定(camera calibration)和追踪(tracking)的精度不够。摄像机标定的误差会体现在重建中(比如三角法重建时),而追踪的误差则会体现在不同关键帧之间的位姿中,和重建中(单目)。误差的不断累积会导致后面帧的位姿离实际位姿越来越远,最终会限制系统整体的精度。
1.1 摄像机标定
单目SLAM文献中一般假设摄像机标定的结果是准确的,并不考虑这个因素带来的误差(大概因为很多时候跑标准的数据集,认为摄像机标定的误差是相似的)。然而对于一个产品,不同类型的传感器对应的标定误差并不相同,甚至有可能差异很大。因此,如果要评估整个系统的精度,这方面的误差必须要考虑进去。
1.2 追踪
无论在单目、双目还是RGBD中,追踪得到的位姿都是有误差的。单目SLAM中,如果两帧之间有足够的对应点,那么既可以直接得到两帧之间的位姿(像初始化中那样),也可以通过求解一个优化问题得到(如solvePnP)。由于单目中尺度的不确定性,还会引入尺度的误差。由于tracking得到的总是相对位姿,前面某一帧的误差会一直传递到后面去,导致tracking到最后位姿误差有可能非常大。为了提高tracking的精度,可以1. 在局部和全局优化位姿;2. 利用闭环检测(loop closure)来优化位姿。
二、如何优化
2.1 优化的目标函数在SLAM问题中,常见的几种约束条件为: 1. 三维点到二维特征的映射关系(通过投影矩阵);2. 位姿和位姿之间的变换关系(通过三维刚体变换);3. 二维特征到二维特征的匹配关系(通过F矩阵);5. 其它关系(比如单目中有相似变换关系)。如果我们能够知道其中的某些关系是准确的,那么可以在g2o中定义这样的关系及其对应的残差,通过不断迭代优化位姿来逐步减小残差和,从而达到优化位姿的目标。
2.2 局部优化
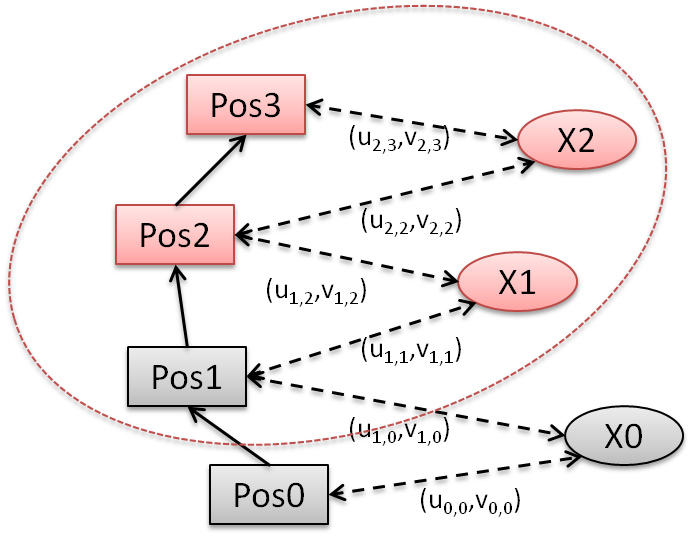
当新的关键帧加入到convisibility graph时,作者在关键帧附近进行一次局部优化,如下图所示。Pos3是新加入的关键帧,其初始估计位姿已经得到。此时,Pos2是和Pos3相连的关键帧,X2是Pos3看到的三维点,X1是Pos2看到的三维点,这些都属于局部信息,共同参与Bundle Adjustment。同时,Pos1也可以看到X1,但它和Pos3没有直接的联系,属于Pos3关联的局部信息,参与Bundle Adjustment,但取值保持不变。Pos0和X0不参与Bundle Adjustment。
因此,参与优化的是下图中红色椭圆圈出的部分,其中红色代表取值会被优化,灰色代表取值保持不变。(u,v)是X在Pos下的二维投影点,即X在Pos下的测量(measurement)。优化的目标是让投影误差最小。
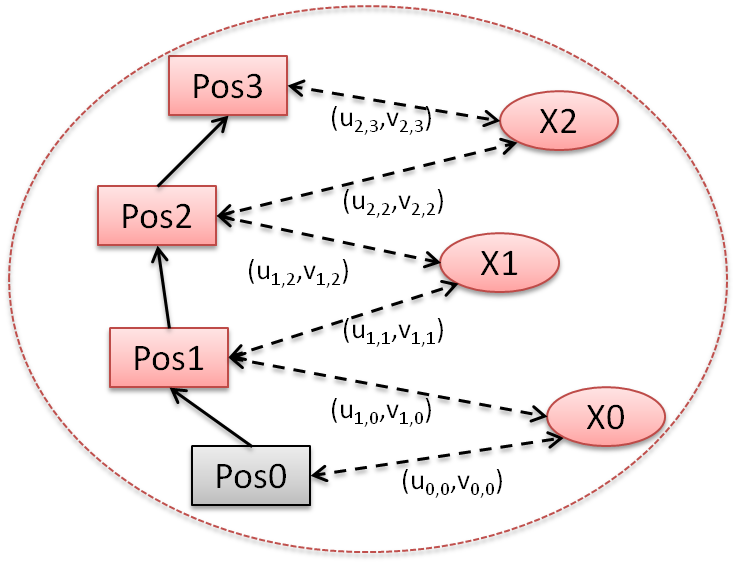
2.3 全局优化
在全局优化中,所有的关键帧(除了第一帧)和三维点都参与优化。
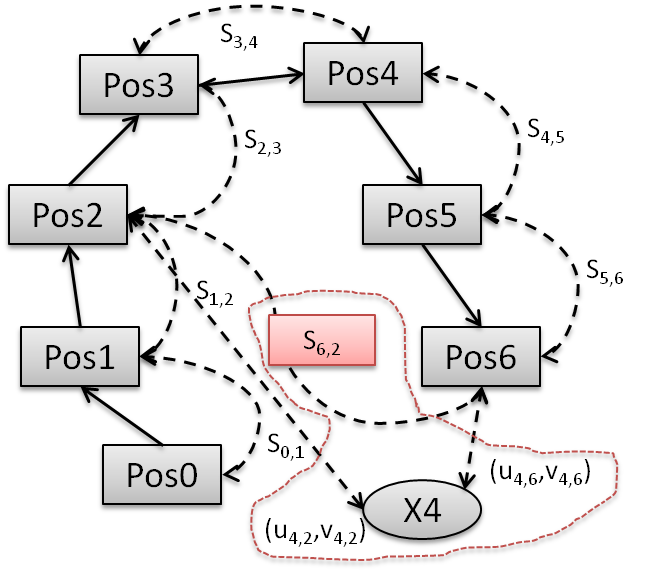
2.4 闭环处的Sim3位姿优化
当检测到闭环时,闭环连接的两个关键帧的位姿需要通过Sim3优化(以使得其尺度一致)。优化求解两帧之间的相似变换矩阵,使得二维对应点(feature)的投影误差最小。
如下图所示,Pos6和Pos2为一个可能的闭环。通过$(u_{4,2},v_{4,2})$和$(u_{4,6},v_{4,6})$之间的投影误差来优化$S_{6,2}$。
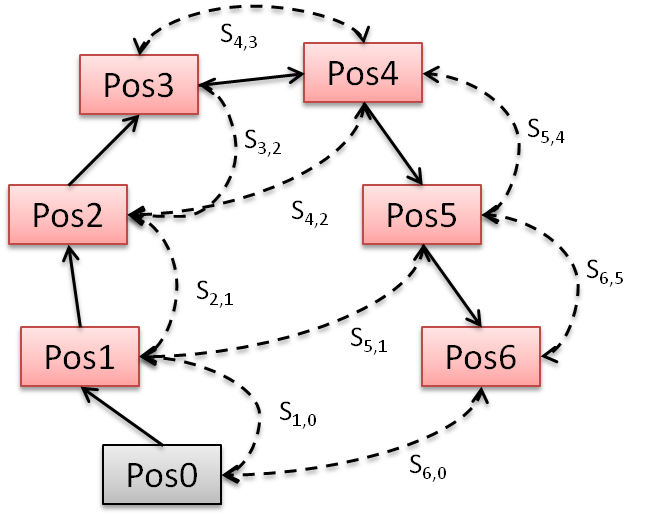
2.5 Sim3上的位姿优化
单目SLAM一般都会发生尺度(scale)漂移,因此Sim3上的优化是必要的。相对于SE3,Sim3的自由度要多一个,而且优化的目标是矫正尺度因子,因此优化并没有加入更多的变量(如三维点)。
作者在检测到闭环时在Sim3上对所有的位姿进行一次优化。定义Sim3上的残差如下:
$e_{i,j}=log_{Sim3}(S_{ij}S_{jw}S_{iw}^{-1})$
其中$S_{iw}$的初值是尺度为1的Pos i相对于世界坐标系的变换矩阵。$S_{i,j}$为Pos i和Pos j之间的(Sim3优化之前的)相对位姿矩阵,表示$S_{iw}$和$S_{jw}$之间的测量(measurement)。此处相当于认为局部的相对位姿是准确的,而全局位姿有累计误差,是不准确的。
三、小结
个人理解,单目SLAM中的优化需要更多技巧,要有明确的优化目标,要仔细权衡其中的参数选择、自由度、速度和稳定性。
该系列的其它文章:
ORB-SLAM(五)优化的更多相关文章
- SLAM图优化g2o
SLAM图优化g2o 图优化g2o框架 图优化的英文是 graph optimization 或者 graph-based optimization, "图"其实是数据结构中的gr ...
- c json实战引擎五 , 优化重构
引言 scjson是一个小巧的纯c跨平台小巧引擎. 适用于替换老的cJSON引擎的场景. 数据结构和代码布局做了大量改进.优势体现在以下几个方面: 1) 跨平台 (window 10 + VS2017 ...
- 从零开始一起学习SLAM | 理解图优化,一步步带你看懂g2o代码
首发于公众号:计算机视觉life 旗下知识星球「从零开始学习SLAM」 这可能是最清晰讲解g2o代码框架的文章 理解图优化,一步步带你看懂g2o框架 小白:师兄师兄,最近我在看SLAM的优化算法,有种 ...
- [SLAM] 01. "Simultaneous Localization and Mapping"
本篇带你认识SLAM,形成客观的认识和体系 一.通过行业招聘初步了解SLAM 发信人: leecty (Terry), 信区: ParttimeJobPost标 题: 创业公司招SLAM 算法工程师发 ...
- [SLAM] 01 "Simultaneous Localization and Mapping" basic knowledge
发信人: leecty (Terry), 信区: ParttimeJobPost标 题: 创业公司招SLAM 算法工程师发信站: 水木社区 (Thu Jun 16 19:18:24 2016), 站内 ...
- (转) SLAM系统的研究点介绍 与 Kinect视觉SLAM技术介绍
首页 视界智尚 算法技术 每日技术 来打我呀 注册 SLAM系统的研究点介绍 本文主要谈谈SLAM中的各个研究点,为研究生们(应该是博客的多数读者吧)作一个提纲挈领的摘要.然后,我 ...
- 最近一年语义SLAM有哪些代表性工作?
点击"计算机视觉life"关注,置顶更快接收消息! 本文由作者刘骁授权发布,转载请联系原作者,个人主页http://www.liuxiao.org 目前 Semantic SLAM ...
- 当前的开源SLAM方案
开源方案 传感器形式 地址链接 MonoSLAM 单目 https://github.com/hanmekim/SceneLib2 PTAM 单目 http://www.robots.ox.ac. ...
- 常用的SLAM解决方案
ORB SLAM 可以去Github上自己搜索现成的SLAM程序包 在此基础上做优化 视觉SLAM的分类方法:按摄像头的多少分为单目和双目,按是否使用概率方法分为概率法和图法 链接 学习SLAM重要的 ...
- SLAM的现在与未来
http://geek.csdn.net/news/detail/202128 作者:高翔,张涛,刘毅,颜沁睿. 编者按:本文节选自图书<视觉SLAM十四讲:从理论到实践>,系统介绍了视觉 ...
随机推荐
- python之最强王者(3)——变量,条件、循环语句
1.Python 变量类型 变量存储在内存中的值.这就意味着在创建变量时会在内存中开辟一个空间. 基于变量的数据类型,解释器会分配指定内存,并决定什么数据可以被存储在内存中. 因此,变量可以指定不同的 ...
- Hibernate全套增删改查+分页
1.创建一个web工程 2.导入jar包 3.创建Student表 4.创建实体类 package com.entity; public class Student { private Integer ...
- (转)配置Log4j(很详细)
来自:http://blog.csdn.net/yttcjj/article/details/37957317 Log4J的配置文件(Configuration File)就是用来设置记录器的级别.存 ...
- js获取页面url
设置或获取对象指定的文件名或路径. window.location.pathname例:http://localhost:8086/topic/index?topicId=361alert(windo ...
- iOS 报错汇总
1. Unknown type name 'class'; did you mean 'Class' 问题解决方法 objectice-c 工程中的类(比如 类 A)使用 C++ 文件时 A.m 文 ...
- iOS空心圆下载进度指示器控件
self.layer = [CAShapeLayer layer]; self.layer.frame = CGRectMake(, , , ); self.layer.position = self ...
- C# 在Repeater 的ItemDataBound 如何转换e.Item.DataItem 的类型
1.使用DataSet和DataTable绑定数据源时,用 DataRowView view = (DataRowView)e.Item.DataItem; 2.DataReader绑定数据源时,用 ...
- MVC 5 中Filter控制 action的访问权限
1,创建一个继承自 FilterAttribute, IActionFilter的类 namespace HeatMetering2.Filters { public class HMV2Authen ...
- linux ssh远程免登陆
一.备份: 操作之前先将/root/.ssh/下的known_hosts备份成known_hosts.bak
- RemodelanyWhere11.0.2673版本下载
百度云盘链接:http://pan.baidu.com/s/1geL5lez 密码:hisq 原文转载至:http://blog.sun0816.com/13623.html