[转]ORB特征提取-----FAST角点检测
转载地址:https://blog.csdn.net/maweifei/article/details/62887831
(一)ORB特征点提取算法的简介
Oriented FAST and Rotated BRIEF,简称ORB,该特征检测算子是在著名的FAST特征检测和BRIEF特征描述子的基础上提出来的,其运行时间远远优于SIFT和SURF,可应用于实时性特征检测。ORB特征检测具有尺度和旋转不变性,对于噪声及其透视变换也具有不变性,良好的性能是的利用ORB在进行特征描述时的应用场景十分广泛。ORB特征检测主要分为以下两个步骤:(1)方向FAST特征点检测(2)BRIEF特征描述。
(二)方向FAST特征点检测
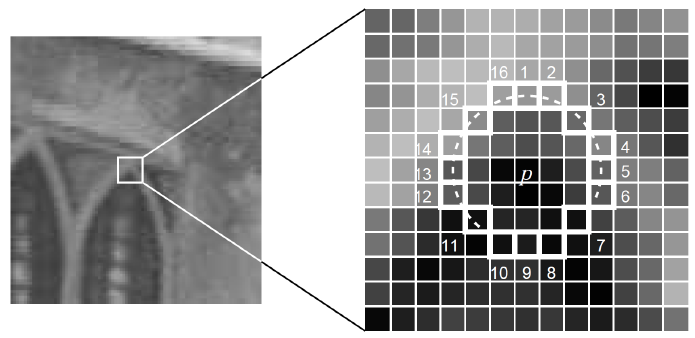
步骤一:粗提取。该步能够提取大量的特征点,但是有很大一部分的特征点的质量不高。下面介绍提取方法。从图像中选取一点P,如上图1。我们判断该点是不是特征点的方法是,以P为圆心画一个半径为3pixel的圆。圆周上如果有连续n个像素点的灰度值比P点的灰度值大或者小,则认为P为特征点。一般n设置为12。为了加快特征点的提取,快速排出非特征点,首先检测1、9、5、13位置上的灰度值,如果P是特征点,那么这四个位置上有3个或3个以上的的像素值都大于或者小于P点的灰度值。如果不满足,则直接排出此点。
步骤二:机器学习的方法筛选最优特征点。简单来说就是使用ID3算法训练一个决策树,将特征点圆周上的16个像素输入决策树中,以此来筛选出最优的FAST特征点。
步骤三:非极大值抑制去除局部较密集特征点。使用非极大值抑制算法去除临近位置多个特征点的问题。为每一个特征点计算出其响应大小。计算方式是特征点P和其周围16个特征点偏差的绝对值和。在比较临近的特征点中,保留响应值较大的特征点,删除其余的特征点。
步骤四:特征点的尺度不变形。建立金字塔,来实现特征点的多尺度不变性。设置一个比例因子scaleFactor(opencv默认为1.2)和金字塔的层数nlevels(pencv默认为8)。将原图像按比例因子缩小成nlevels幅图像。缩放后的图像为:I’=
I/scaleFactork(k=1,2,…, nlevels)。nlevels幅不同比例的图像提取特征点总和作为这幅图像的oFAST特征点。
步骤五:特征点的旋转不变性。ORB算法提出使用矩(moment)法来确定FAST特征点的方向。也就是说通过矩来计算特征点以r为半径范围内的质心,特征点坐标到质心形成一个向量作为该特征点的方向。矩定义如下:

其中,I(x,y)为图像灰度表达式。该矩的质心为:
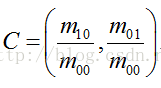
假设角点坐标为O,则向量的角度即为该特征点的方向。计算公式如下:

- /********************************************************************************************************
- 文件说明:
- FAST角点检测
- 开发环境:
- Win7 + OpenCv2.4.8 + VS2012
- 时间地点:
- 陕西师范大学 2017.3.17
- 作 者:
- 九 月
- *********************************************************************************************************/
- #include <opencv2/core/core.hpp>
- #include <opencv2/highgui/highgui.hpp>
- #include <opencv2/imgproc/imgproc.hpp>
- #include <opencv2/features2d/features2d.hpp>
- using namespace cv;
- using namespace std;
- int main(int argc, char** argv)
- {
- cv::Mat img = imread("hand1.jpg");
- std::vector<cv::KeyPoint> keypoints;
- cv::FastFeatureDetector fast(15); // 检测的阈值为50
- fast.detect(img, keypoints);
- cv::Mat img_keypoints;
- cv::drawKeypoints(img, keypoints, img_keypoints, Scalar::all(-1), DrawMatchesFlags::DEFAULT);
- cv::imshow("Keypoints", img_keypoints);
- cv::waitKey(0);
- return 0;
- }

参考资料:
1)http://blog.csdn.net/hujingshuang/article/details/46898007
2)http://m.blog.csdn.net/article/details?id=52625678
3)http://download.csdn.net/detail/yang843061497/7785917
4)http://www.cvchina.info/2011/07/04/whats-orb/
5)http://blog.sina.com.cn/s/blog_916b71bb0100w9al.html
[转]ORB特征提取-----FAST角点检测的更多相关文章
- 第十四节、FAST角点检测(附源码)
在前面我们已经陆续介绍了许多特征检测算子,我们可以根据图像局部的自相关函数求得Harris角点,后面又提到了两种十分优秀的特征点以及他们的描述方法SIFT特征和SURF特征.SURF特征是为了提高运算 ...
- FAST特征点检测
Features From Accelerated Segment Test 1. FAST算法原理 博客中已经介绍了很多图像特征检测算子,我们可以用LoG或者DoG检测图像中的Blobs(斑点检测) ...
- opencv笔记6:角点检测
time:2015年10月09日 星期五 23时11分58秒 # opencv笔记6:角点检测 update:从角点检测,学习图像的特征,这是后续图像跟踪.图像匹配的基础. 角点检测是什么鬼?前面一篇 ...
- Opencv学习笔记------Harris角点检测
image算法测试iteratoralgorithmfeatures 原创文章,转载请注明出处:http://blog.csdn.net/crzy_sparrow/article/details/73 ...
- Harris角点及Shi-Tomasi角点检测(转)
一.角点定义 有定义角点的几段话: 1.角点检测(Corner Detection)是计算机视觉系统中用来获得图像特征的一种方法,广泛应用于运动检测.图像匹配.视频跟踪.三维建模和目标识别等领域中.也 ...
- ORB(oriented FAST and rotated BRIEF)特征提取与检测
ORB采取FAST算法检测特征点,采取BRIEF算法计算特征点描述子. 1.检测特征点 检测候选特征点周围一圈的像素值,若有足够多的像素值与候选特征点的差异都较大,则认为该候选特征点是特征点. 对于上 ...
- 图像处理检测方法 — ORB(Oriented FAST and Rotated BRIEF)
1.FAST FAST算子的基本原理是:若某像素点与其周围领域内足够多的连续的像素点存在某一属性差异,并且该差异大于指定阈值,则可以断定该像素点与其邻域像素有可被识别的不同之处,可以作为一个特征点( ...
- 特征点检测算法——FAST角点
上面的算法如SIFT.SURF提取到的特征也是非常优秀(有较强的不变性),但是时间消耗依然很大,而在一个系统中,特征提取仅仅是一部分,还要进行诸如配准.提纯.融合等后续算法.这使得实时性不好,降系了统 ...
- ORB特征提取与匹配
ORB特征是目前最优秀的特征提取与匹配算法之一,下面具体讲解一下: 特征点的检测 图像的特征点可以简单的理解为图像中比较显著显著的点,如轮廓点,较暗区域中的亮点,较亮区域中的暗点等.ORB采用FAST ...
随机推荐
- Java——数据类型
数据类型分类 基本数据类型: 数值型: 整数类型(byte,short,int,long): 浮点类型(float,double): 字符型(char): 布尔值(boolean): 引用数据类型: ...
- Spark日志,及设置日志输出级别
Spark日志,及设置日志输出级别 1.全局应用设置 2.局部应用设置日志输出级别 3.Spark log4j.properties配置详解与实例(摘录于铭霏的记事本) 文章内容来源: 作者:大葱拌豆 ...
- 【函数分享】每日PHP函数分享(2021-2-6)
array_combine - 创建一个数组,用一个数组的值作为其键名,另一个数组的值作为其值 说明: array_combine ( array $keys , array $values ) : ...
- Codeforces Round #637 (Div. 2)
比赛链接:https://codeforces.com/contest/1341 A - Nastya and Rice 题意 有 n 堆米,每堆质量在 [a-b,a+b] 之间,这些米的总质量是否可 ...
- Java——方法及构造方法、intellij IDEA中的一些快捷键
intellij IDEA中的一些快捷键: 一.方法基础 给你一个两个int类型的数相加的例子: 这个例子说明了 public static void main(String[] args) {}相当 ...
- Educational Codeforces Round 97 (Rated for Div. 2) D. Minimal Height Tree (贪心)
题意:有一个从根节点\(BFS\)得来的序列(每次\(bfs\)子节点的时候保证是升序放入队列的),现在让你还原树(没必要和之前相同),问能构造出的最小的树的深度. 题解:不看根节点,我们从第二个位置 ...
- Toxophily HDU - 2298 三分+二分
代码+解析: 1 //题意: 2 //有一个大炮在(0,0)位置,为你可不可以把炮弹射到(x,y)这个位置 3 //题目给你炮弹初始速度,让你求能不能找出来一个炮弹射出时角度满足题意 4 //题解: ...
- TextCNN论文解读
引言 本文是对<Convolutional Neural Networks for Sentence Classification>的原理解读,简称TextCNN. 作者提出了一种基于CN ...
- Kubernets二进制安装(9)之部署主控节点控制器controller-manager
kube-controller-manager运行控制器,它们是处理集群中常规任务的后台线程 Controller Manager就是集群内部的管理控制中心,由负责不同资源的多个Controller构 ...
- 007.NET5 Log4Net组件使用
NET 5 Log4Net组件使用 1. Nuget引入程序集:log4net + Microsfot.Extensions.Logging.Log4Net.AspNetCore 2. 准备配置文件 ...