TurtleBot3 Waffle (tx2版华夫)(9)建图-gmapping建图(A2雷达)
9.1. 说明
这一节我们来讲 Turtlebot3 的 SLAM
SLAM(The Simultaneous Localization and Mapping) 同步定位与地图构建: 希
望机器人从未知环境的未知地点出发, 在运动过程中通过重复观测到的地图特征(比如, 墙角, 柱子等) 定位自身位置和姿态, 再根据自身位置增量式的构建地图,从而达到同时定位和地图构建的目的。 (维基百科)
9.2.通过远程操作创建地图
1)[Remote PC] 启动roscore
$ roscore
1)[TurBot3] 启动turbot3
$ roslaunch turbot3_bringup minimal.launch
2)[TurBot3] 运行SLAM启动文件
$ roslaunch turbot3_slam gmapping_demo.launch
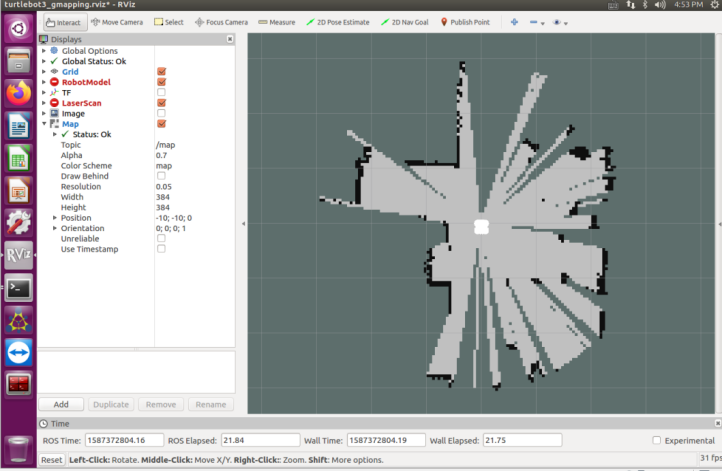
3)[Remote PC] 启动Rviz可视化模型
$ roslaunch turbot3_rviz navigation_rviz.launch
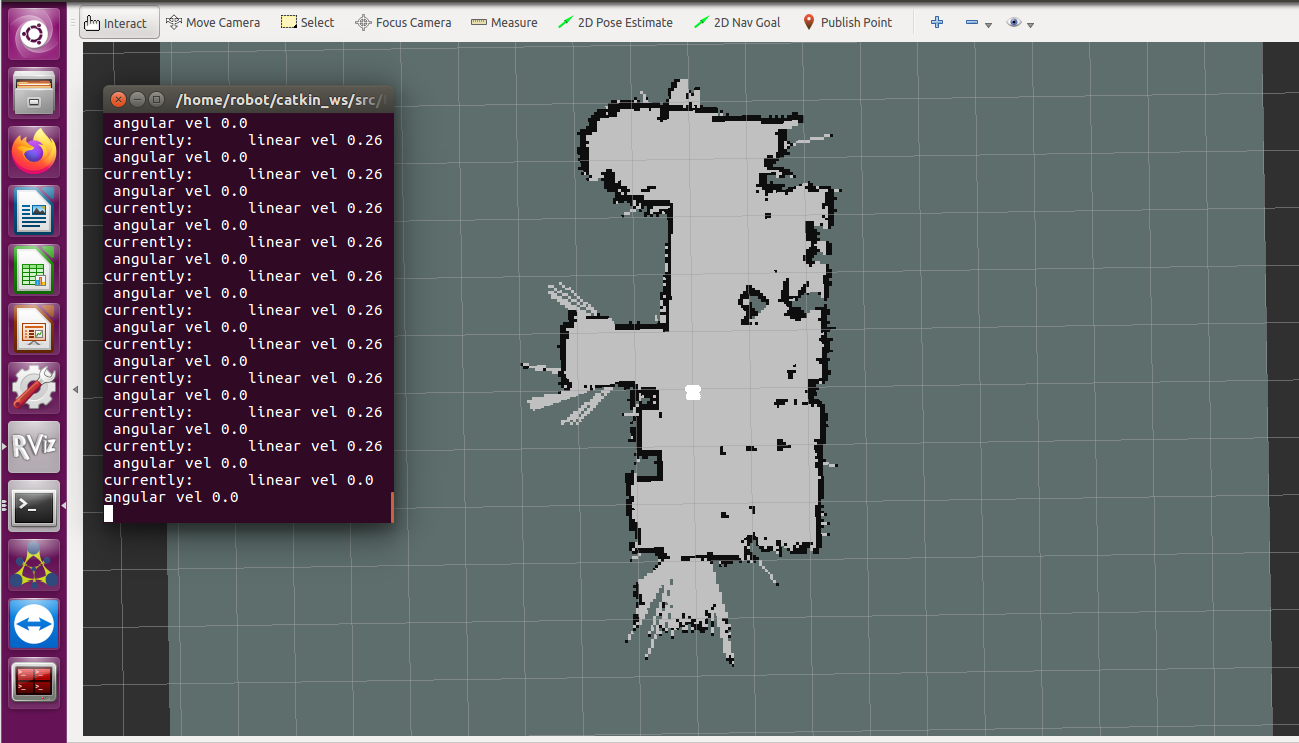
4)[Remote PC] 启动键盘操作
$ roslaunch turbot3_teleop keyboard.launch
移动turbot3进行建图
5)[TurBot3] 完成建图后运行地图保存节点
$ rosrun map_server map_saver -f ~/map
map.pgm和map.yaml 在 ~/ 目录里创建

TurtleBot3 Waffle (tx2版华夫)(9)建图-gmapping建图(A2雷达)的更多相关文章
- TurtleBot3 Waffle (tx2版华夫)(12)建图-hector建图
1)[Remote PC] 启动roscore $ roscore 2)[TurBot3] 启动turbot3 $ roslaunch turbot3_bringup minimal.launch 3 ...
- TurtleBot3 Waffle (tx2版华夫)(11)建图-karto建图
1)[Remote PC] 启动roscore $ roscore 2)[TurBot3] 启动turbot3 $ roslaunch turbot3_bringup minimal.launch 3 ...
- TurtleBot3 Waffle (tx2版华夫)(10)自主导航(A2激光雷达)
1)[Remote PC] 启动roscore $ roscore 2)[TurBot3] 启动turbot3 $ roslaunch turbot3_bringup minimal.launch 3 ...
- TurtleBot3 Waffle (tx2版华夫)(5)激活你的雷达
重要提示:请在配网通信成功后进行操作,配网后再次开机需要重新验证通信: 重要提示:[Remote PC]代表PC端.[TurtelBot]代表树莓派端: 5.1.操作步骤 1)[Remote PC] ...
- TurtleBot3 Waffle (tx2版华夫)(4)笔记本与TX2的通信
4.1. 使用vnc控制华夫Turbot3-Tx2开发板 1) 电脑端安装vnc viewer,您可以选择应用商城下载安装即可: 2) 下载后打开,键入Turbot3的ip à回车à选择连接: 3) ...
- TurtleBot3 Waffle (tx2版华夫)(2)系统安装
Tx2系统默认是安装好的,由于镜像文件大于20G,无法上传百度网盘,所以如有需要请联系我们客服:下面主要是操作步骤: 2.1.准备工作 a.准备好利用Jetpack刷过机的Ubuntu的主机(HOST ...
- TurtleBot3 Waffle (tx2版华夫)(13)RC100遥控杆控制
13.1.遥控器说明 使用ROBOTIS RC100的设置已经在ROS的OpenCR固件中,因此不需要安装必需软件包, 安装号即可使用. 13.2.遥控器的安装 1接线口穿过后壳的过孔. 2接线口连接 ...
- TurtleBot3 Waffle (tx2版华夫)(8)键盘控制
1)[Remote PC] 启动roscore $ roscore 2)[Turbot3] 启动turbot3 $ roslaunch turbot3_bringup minimal.launch 3 ...
- TurtleBot3 Waffle (tx2版华夫)(7)底盘测试
说明:opencr本身带有自测底盘功能,通过按opencr的sw1和sw2来自检底盘是否正确安装和运行: 7.1.前进测试 1)测试前,先把小车架空,轮子不要着地: 2)接好电源后,打开opencr的 ...
随机推荐
- 第8.10节 使用__class__查看Python中实例对应的类
一. 语法释义 __class__属性很简单,直接返回实例对应的类.语法如下: 实例. class 当不知道一个实例的类名又想对类的部分内容进行访问时可以使用__class__返回类. 注意:是返回实 ...
- 第11.23节 Python 中re模块的搜索替换功能:sub及subn函数
一. 引言 在<第11.3节 Python正则表达式搜索支持函数search.match.fullmatch.findall.finditer>重点介绍了几个搜索函数,除了搜索,re模块也 ...
- jQuery笔记(三)
day03 - jQuery 学习目标: 能够说出4种常见的注册事件 能够说出 on 绑定事件的优势 能够说出 jQuery 事件委派的优点以及方式 能够说出绑定事件与解绑事件 能够说出 jQuery ...
- java中的反射(三)
目录 一.反射 1.class类 2.访问字段 3.调用方法 4.调用构造方法 5.获取继承对象 6.动态代理 二.sping中的反射 本篇转自:https://depp.wang/2020/05/0 ...
- Redis Sentinel-深入浅出原理和实战
本篇博客会简单的介绍Redis的Sentinel相关的原理,同时也会在最后的文章给出硬核的实战教程,让你在了解原理之后,能够实际上手的体验整个过程. 之前的文章聊到了Redis的主从复制,聊到了其相关 ...
- nginx配置访问本地资源
参考博客:https://www.cnblogs.com/xy51/p/9973326.html 需要访问路径:http://IP:10013/p1upgrade/picfiles/image73b4 ...
- js-enter提交表单导致页面刷新问题
问题:当页面只有一个文本框时,使用键盘enter操作执行提交表单的时候,会导致页面进行刷新,并且参数也会自动添加到url中. 解决办法: 1.给form添加onsubmit=return false; ...
- JS复习之深浅拷贝
一.复习导论(数据类型相关) 想掌握JS的深浅拷贝,首先来回顾一下JS的数据类型,JS中数据类型分为基本数据类型和引用数据类型. 基本数据类型是指存放在栈中的简单数据段,数据大小确定,内存空间大小可以 ...
- python 通过pip freeze、dowload打离线包及自动安装【适用于保密的离线环境】
python的pip是其包管理工具,相当方便好用.本文只介绍pip 如何通过其freeze命令打离线包,及其离线包的安装脚本.这个知识点,特别适用于不适合连通互联网,设备需要物理隔绝,保密要求严格的客 ...
- 跨站点脚本编制 - SpringBoot配置XSS过滤器(基于mica-xss)
1. 简介 XSS,即跨站脚本编制,英文为Cross Site Scripting.为了和CSS区分,命名为XSS. XSS是最普遍的Web应用安全漏洞.这类漏洞能够使得攻击者嵌入恶意脚本代码 ...