u-boot之start_armboot函数分析
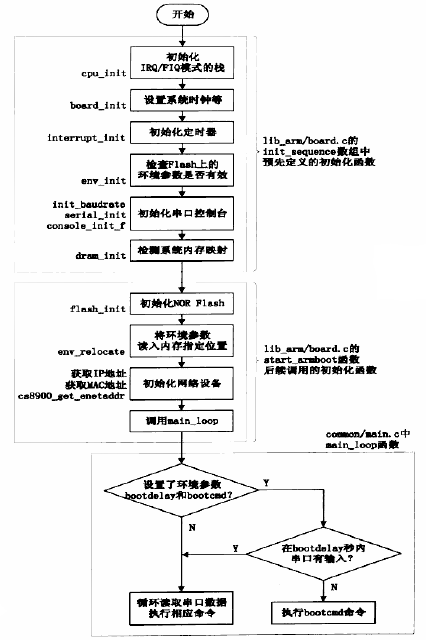
在分析start.S文件过程中提到过,最后从汇编跳到C函数执行的是start_armboot函数,位于lib_arm\board.c文件下,它的执行流程图如下,截图来源于《嵌入式LINUX应用开发完全手册》。根据流程图,以下内容大致分几步写:
1、gd全局变量初始化
2、调用init_sequence函数指针数组里的初始化函数、nand初始化、环境变量初始化、USB初始化
3、死循环main_loop()分析
1、gd全局变量初始化
gd是全局引用的变量,它的定义在Global_data.h (include\asm-arm)中,它利用的是CPU的寄存器r8。只有在文件中引用DECLARE_GLOBAL_DATA_PTR ,就可以使用gd这个变量
- #define DECLARE_GLOBAL_DATA_PTR register volatile gd_t *gd asm ("r8")
它是一个指向gd_t结构体的指针,gd_t结构体如下所示
- typedef struct global_data {
- bd_t *bd; //bd结构体
- unsigned long flags; //标志
- unsigned long baudrate; //使用的波特率
- unsigned long have_console; /* serial_init() was called */ //是否有控制台的标志
- unsigned long reloc_off; /* Relocation Offset */ //重定位地址
- unsigned long env_addr; /* Address of Environment struct *///环境变量存放的地址
- unsigned long env_valid; /* Checksum of Environment valid? *///检查环境变量是否有效
- unsigned long fb_base; /* base address of frame buffer */ //lcd的缓存地址
- #ifdef CONFIG_VFD
- unsigned char vfd_type; /* display type */
- #endif
- #if 0
- unsigned long cpu_clk; /* CPU clock in Hz! */
- unsigned long bus_clk;
- unsigned long ram_size; /* RAM size */
- unsigned long reset_status; /* reset status register at boot */
- #endif
- void **jt; /* jump table */
- } gd_t;
其中env_addr、baudrate、bd等参数比较重要,bd也是一个结构体,在U-boot.h (include\asm-arm)里定义,定义如下所示,这里面bi_arch_number与bi_boot_params这两个参数是传给内核的,很重要。
- typedef struct bd_info {
- int bi_baudrate; /* serial console baudrate *///串口作为控制台时的波特率
- unsigned long bi_ip_addr; /* IP Address */ //ip地址,可配置
- unsigned char bi_enetaddr[]; /* Ethernet adress */ //物理网络地址,即MAC Address,网卡决定,不可配置
- struct environment_s *bi_env; //指向环境变量的指针
- ulong bi_arch_number; /* unique id for this board *///CPU架构号码,传给内核
- ulong bi_boot_params; /* where this board expects params *///标记列表的开始地址,传给内核,告诉内核从这个地方取参数
- struct /* RAM configuration */
- {
- ulong start;
- ulong size;
- } bi_dram[CONFIG_NR_DRAM_BANKS];//sdram的起始地址与大小
- #ifdef CONFIG_HAS_ETH1
- /* second onboard ethernet port */
- unsigned char bi_enet1addr[];
- #endif
- } bd_t;
environment_s结构体定义在Environment.h (include)中,如下所示。环境变量就是以这个格式存储在nand中的
- #define ENV_SIZE (CFG_ENV_SIZE - ENV_HEADER_SIZE)//0x20000-5,减去的5为crc校验与flags占用的
- typedef struct environment_s {
- unsigned long crc; /* CRC32 over data bytes *///crc校验
- #ifdef CFG_REDUNDAND_ENVIRONMENT
- unsigned char flags; /* active/obsolete flags *///环境变量标志
- #endif
- unsigned char data[ENV_SIZE]; /* Environment data *///环境变量具体的数据。最大
- } env_t;
start_armboot函数一开始先初始化gd变量。gd变量所指向的内容占用128字节存放在堆区后面,栈区前面。
- /* Pointer is writable since we allocated a register for it */
- gd = (gd_t*)(_armboot_start - CFG_MALLOC_LEN - sizeof(gd_t));//gd地址向上增长
- /* compiler optimization barrier needed for GCC >= 3.4 */
- __asm__ __volatile__("": : :"memory");
- memset ((void*)gd, , sizeof (gd_t));//清0 gd段
- gd->bd = (bd_t*)((char*)gd - sizeof(bd_t));//求出bd段地址
- memset (gd->bd, , sizeof (bd_t));//清0gd->bd段
- monitor_flash_len = _bss_start - _armboot_start;//显示需要的flash长度
2、调用init_sequence函数指针数组里的初始化函数、nand初始化、环境变量初始化、USB初始化
start_armboot函数继续往下执行,执行初始化函数数组里的函数
- for (init_fnc_ptr = init_sequence; *init_fnc_ptr; ++init_fnc_ptr) {//初始化各个函数 by andy
- if ((*init_fnc_ptr)() != ) {//函数的返回值不为0,认为出错,打印出错信息 by andy
- hang ();//打印出错信息 by andy
- }
- }
init_sequence数组的内容如下所示
- init_fnc_t *init_sequence[] = {
- cpu_init, /* basic cpu dependent setup *///CPU的一些堆栈大小设置 by andy
- board_init, /* basic board dependent setup *///设置芯片代码、设置与内核交互的地址 by andy
- interrupt_init, /* set up exceptions *///10ms时钟定时器设置 by andy
- env_init, /* initialize environment *///初始化环境变量,采用默认环境变量 by andy
- init_baudrate, /* initialze baudrate settings *///初始化串口波特率为115200 by andy
- serial_init, /* serial communications setup *///初始化串口在cpu/arm920t/s3c24x0中实现 by andy
- console_init_f, /* stage 1 init of console *///设置控制台初始化标志 by andy
- display_banner, /* say that we are here *///打印UBOOT版本信息 by andy
- #if defined(CONFIG_DISPLAY_CPUINFO)
- print_cpuinfo, /* display cpu info (and speed) */
- #endif
- #if defined(CONFIG_DISPLAY_BOARDINFO)
- checkboard, /* display board info */
- #endif
- dram_init, /* configure available RAM banks *///内存起始地址以及大小设置 by andy
- display_dram_config,//打印出DRAM的大小 by andy
- NULL,
- };
start_armboot函数继续往下执行,清0分配的堆区的内容
- /* armboot_start is defined in the board-specific linker script */
- mem_malloc_init (_armboot_start - CFG_MALLOC_LEN);//清0堆区的内容
- void mem_malloc_init (ulong dest_addr)
- {
- mem_malloc_start = dest_addr; //堆区的首地址
- mem_malloc_end = dest_addr + CFG_MALLOC_LEN; //堆区的结束地址
- mem_malloc_brk = mem_malloc_start;
- memset ((void *) mem_malloc_start, ,
- mem_malloc_end - mem_malloc_start);//清0堆区的内容
- }
start_armboot函数继续往下执行,初始化nand,环境变量的内容存储在nand中
- puts ("NAND: ");//打印出nand的大小
- nand_init(); /* go init the NAND *///初始化nand flash
start_armboot函数继续往下执行,重新检测环境变量,环境变量在初始化函数数组中已经初始化过,因为nand初始化后,所以再检测一般环境变量是否需要重新加载。env_relocate 函数大致的意思是检查nand中的存放环境变量位置的crc校验是否有效,如果无效则采用默认的环境变量,如果有效则采用nand中的环境变量
- /* initialize environment */
- env_relocate ();//初始化环境变量,crc有效的话从nand中读取存储的环境变量,否则采用默认的环境变量 by andy
默认的环境变量的值如下
- uchar default_environment[] = {
- #ifdef CONFIG_BOOTARGS
- "bootargs=" CONFIG_BOOTARGS "\0"//"noinitrd root=/dev/mtdblock3 init=/linuxrc console=ttySAC0",传给内核的参数
- #endif
- #ifdef CONFIG_BOOTCOMMAND
- "bootcmd=" CONFIG_BOOTCOMMAND "\0"//"nand read.jffs2 0x30007FC0 kernel; bootm 0x30007FC0"。启动内核的命令
- #endif
- #ifdef CONFIG_RAMBOOTCOMMAND
- "ramboot=" CONFIG_RAMBOOTCOMMAND "\0"
- #endif
- #ifdef CONFIG_NFSBOOTCOMMAND
- "nfsboot=" CONFIG_NFSBOOTCOMMAND "\0"
- #endif
- #if defined(CONFIG_BOOTDELAY) && (CONFIG_BOOTDELAY >= 0)
- "bootdelay=" MK_STR(CONFIG_BOOTDELAY) "\0"//延时参数2S
- #endif
- #if defined(CONFIG_BAUDRATE) && (CONFIG_BAUDRATE >= 0)
- "baudrate=" MK_STR(CONFIG_BAUDRATE) "\0"//波特率115200
- #endif
- #ifdef CONFIG_LOADS_ECHO
- "loads_echo=" MK_STR(CONFIG_LOADS_ECHO) "\0"
- #endif
- #ifdef CONFIG_ETHADDR
- "ethaddr=" MK_STR(CONFIG_ETHADDR) "\0"//08:00:3e:26:0a:5b;MAC地址
- #endif
- #ifdef CONFIG_ETH1ADDR
- "eth1addr=" MK_STR(CONFIG_ETH1ADDR) "\0"
- #endif
- #ifdef CONFIG_ETH2ADDR
- "eth2addr=" MK_STR(CONFIG_ETH2ADDR) "\0"
- #endif
- #ifdef CONFIG_ETH3ADDR
- "eth3addr=" MK_STR(CONFIG_ETH3ADDR) "\0"
- #endif
- #ifdef CONFIG_IPADDR
- "ipaddr=" MK_STR(CONFIG_IPADDR) "\0"//板子IP192.168.7.17
- #endif
- #ifdef CONFIG_SERVERIP
- "serverip=" MK_STR(CONFIG_SERVERIP) "\0"//服务器IP192.168.7.11
- #endif
- #
start_armboot函数继续往下执行,从环境变量中获取IP地址以及MAC地址
- gd->bd->bi_ip_addr = getenv_IPaddr ("ipaddr");//从环境变量获得IP地址 by andy
- i = getenv_r ("ethaddr", tmp, sizeof (tmp));//从环境变量获得MAC地址
- s = (i > ) ? tmp : NULL;
- for (reg = ; reg < ; ++reg) {//判断获得的MAC地址有效后存储在gd->bd->bi_enetaddr中
- gd->bd->bi_enetaddr[reg] = s ? simple_strtoul (s, &e, ) : ;
- if (s)
- s = (*e) ? e + : e;
- }
start_armboot函数继续往下执行,控制台初始化,主要为设置输入输出与错误设备都为串口
- console_init_r (); /* fully init console as a device *///控制台初始化
start_armboot函数继续往下执行,USB与网络初始化,主要用来文件传输用的
- Port_Init();
- if (!PreLoadedONRAM) {
- /* enable exceptions */
- enable_interrupts ();
- /* add by www.100ask.net */
- usb_init();//USB初始化by andy
- }
- eth_initialize(gd->bd);//网络初始化
3、死循环main_loop()分析
- for (;;) {//大循环
- main_loop ();//大循环 by andy
- }
下面分析main_loop()函数,它位于Main.c (common)中。main_loop函数首先为nand flash实现分区
- extern int mtdparts_init(void);
- if (!getenv("mtdparts"))//如果mtdparts参数不存在 by andy
- {
- run_command("mtdparts default", );//执行分区命令 设置分区 by andy
- }
- else
- {
- mtdparts_init();
- }
执行完run_command("mtdparts default", 0)后分区内容为:256k@0(bootloader),128k(params),2m(kernel),-(root)。意思是以bootloader占用256k为开头,初始地址为0。接着128k为参数,接着2m为内核,剩余的为文件。
继续执行main_loop函数,从环境变量中取得一些必要的参数。在后面要用到
- s = getenv ("c");//从环境变量中取得boordelay参数
- bootdelay = s ? (int)simple_strtol(s, NULL, ) : CONFIG_BOOTDELAY;//将字符串转换成整形
- s = getenv ("bootcmd");//取得bootcmd环境变量为"nand read.jffs2 0x30007FC0 kernel; bootm 0x30007FC0"
继续执行main_loop函数,如果禁用bootdelay功能,则直接运行bootcmd环境变量。功能为从nand中取得内核到sdram的0x30007FC0 处。然后启动内核
- if (bootdelay >= && s && !abortboot (bootdelay)) {//等待延时数倒计时,如果时间到了则运行bootcmd参数。如果在时间到之前按下了空格键,则继续网线执行
- # ifdef CONFIG_AUTOBOOT_KEYED
- int prev = disable_ctrlc(); /* disable Control C checking */
- # endif
- # ifndef CFG_HUSH_PARSER
- {
- printf("Booting Linux ...\n");
- run_command (s, );//执行bootcmd命令
- }
- # else
- parse_string_outer(s, FLAG_PARSE_SEMICOLON |
- FLAG_EXIT_FROM_LOOP);
- # endif
- # ifdef CONFIG_AUTOBOOT_KEYED
- disable_ctrlc(prev); /* restore Control C checking */
- # endif
- }
继续执行main_loop函数,再来一个循环。若前面没有启动内核,那么进入死循环,等待控制台输入命令然后运行
- for (;;) {//若倒计时没到之前
- #ifdef CONFIG_BOOT_RETRY_TIME
- if (rc >= ) {
- /* Saw enough of a valid command to
- * restart the timeout.
- */
- reset_cmd_timeout();
- }
- #endif
- len = readline (CFG_PROMPT);
- flag = ; /* assume no special flags for now */
- if (len > )
- strcpy (lastcommand, console_buffer);//取得控制台输入设备的数据
- else if (len == )
- flag |= CMD_FLAG_REPEAT;
- #ifdef CONFIG_BOOT_RETRY_TIME
- else if (len == -) {
- /* -2 means timed out, retry autoboot
- */
- puts ("\nTimed out waiting for command\n");
- # ifdef CONFIG_RESET_TO_RETRY
- /* Reinit board to run initialization code again */
- do_reset (NULL, , , NULL);
- # else
- return; /* retry autoboot */
- # endif
- }
- #endif
- if (len == -)
- puts ("<INTERRUPT>\n");
- else
- rc = run_command (lastcommand, flag);//运行从输入设备取得的数据
- if (rc <= ) {
- /* invalid command or not repeatable, forget it */
- lastcommand[] = ;
- }
- }
u-boot之start_armboot函数分析的更多相关文章
- 第1阶段——uboot分析之硬件初始化start_armboot函数(5)
start_armboot()分析:在start.S初始化后跳转到start_armboot实现第2阶段硬件相关的初始化(烧写擦除flash,网卡驱动,usb驱动,串口驱动,从FLASH读内核,启动内 ...
- start_amboot()函数分析
一.整体流程 start_amboot()函数是执行完start.S汇编文件后第一个C语言函数,完成的功能自然还是初始化的工作 . 1.全局变量指针r8设定,以及全局变量区清零 2.执行一些类初始化函 ...
- split(),preg_split()与explode()函数分析与介
split(),preg_split()与explode()函数分析与介 发布时间:2013-06-01 18:32:45 来源:尔玉毕业设计 评论:0 点击:965 split()函数可以实 ...
- string函数分析
string函数分析string函数包含在string.c文件中,经常被C文件使用.1. strcpy函数原型: char* strcpy(char* str1,char* str2);函数功能: 把 ...
- uboot的jumptable_init函数分析
一.函数说明 函数功能:安装系统函数指针 函数位置:common/exports.c 二.函数分析 void jumptable_init (void) { int i; gd->jt = (v ...
- Linux-0.11内核源代码分析系列:内存管理get_free_page()函数分析
Linux-0.11内存管理模块是源码中比較难以理解的部分,如今把笔者个人的理解发表 先发Linux-0.11内核内存管理get_free_page()函数分析 有时间再写其它函数或者文件的:) /* ...
- 31.QPainter-rotate()函数分析-文字旋转不倾斜,图片旋转实现等待
在上章和上上上章: 28.QT-QPainter介绍 30.QT-渐变之QLinearGradient. QConicalGradient.QRadialGradient 学习了QPainter基础绘 ...
- Spring Boot 实战与原理分析视频课程
Spring Boot 实战与原理分析视频课程 链接:https://pan.baidu.com/share/init?surl=PeykcoeqZtd1d9lN9V_F-A 提取码: 关注公众号[G ...
- 如何验证一个地址可否使用—— MmIsAddressValid函数分析
又是一篇内核函数分析的博文,我个人觉得Windows的内核是最好的老师,当你想实现一个功能之前可以看看Windows内核是怎么做的,说不定就有灵感呢:) 首先看下官方的注释说明: /*++ Routi ...
随机推荐
- 简单实现"回车!=提交"(去除表单的回车即提交)
-------------------------------------------------------------------------------------------------- 实 ...
- 13.Java国际化.md
一.国际化开发概述 软件的国际化:软件开发时,要使它能同时应对世界不同地区和国家的访问,并针对不同地区和国家的访问,提供相应的.符合来访者阅读习惯的页面或数据. 国际化(internationaliz ...
- week06 08 postman 测试jsonrpc
用postman来测试rpc需要添加特别的字段 ’ { "jsonrpc":"2.0", "id":"123", &qu ...
- js实现刷新页面出现随机背景图
直接上代码: <script> var bodyBgs = []; bodyBgs[0] = "IMG/01.jpg"; ...
- C++ 关于 CMFCPropertyGridCtrl 的使用方法 之一 (原创)
题外话: 最近在写一个重要的程序,想做的更灵活一些,于是想采用属于对话框的形式,如图所示 但查了好几本大部门的C++及MFC的书,还有很多的网上的资料,这方面的介绍实在是少之又少.不过,好在VS201 ...
- 代码规范【经理培训内容记录】[有参考:http://kb.cnblogs.com/page/179593/]
一.命名规范 方法:所有首字母大写,如BloodControl; 类:所有首字母大写: 变量:第一个首字母小写,其他首字母大写:如bloodControl; 常量:全部字母大写,可用下划线分隔:如BL ...
- 处女座和小姐姐(三)-数位dp1.0
链接:https://ac.nowcoder.com/acm/contest/329/G来源:牛客网 题目描述 经过了选号和漫长的等待,处女座终于拿到了给小姐姐定制的手环,小姐姐看到以后直呼666! ...
- 使用RestTemplate调用接口上传文件
场景 接口接受一个文件,缓存在本地,验证文件的完整性及内容,然后将文件上传至云服务器: 下面只写利用RestTemplate将文件上传至云服务器,至于文件上传以及缓存在本地可以参考:JAVA文件上传: ...
- for嵌套
using System;using System.Collections.Generic;using System.Linq;using System.Text;using System.Threa ...
- HTTP是用来做什么的
(一)HTTP协议介绍 超文本传输协议(HTTP,HyperText Transfer Protocol)是互联网上应用最为广泛的一种网络协议.所有的WWW文件都必须遵守这个标准.设计HTTP最初的目 ...