ng-深度学习-课程笔记-13: 目标检测(Week3)
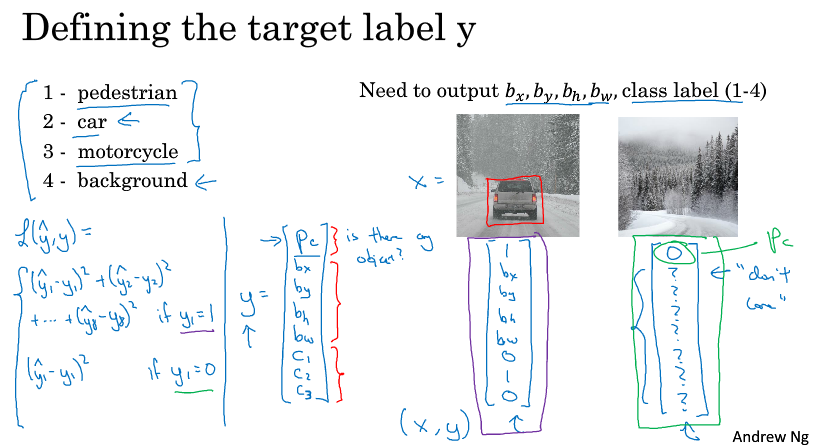
1 目标定位( object localization )
目标定位既要识别,又要定位,它要做的事就是用一个框框把物体目标的位置标出来。
怎么做这个问题呢,我们考虑三目标的定位问题,假定图中最多只出现一个目标,假定图片的左上角为(0,0),右下角为(1,1)。
我们输出层的标签有这么几个,pc, bx, by, bh, bw, c1, c2, c3,其中pc表示是否存在目标,c1,c2,c3分别代表三个类别的目标是否存在,(bx, by)表示框框中心点的坐标,bh表示框框高度,bw表示框框宽度。
考虑损失函数,y = 0 时,只考虑pc之间的逻辑回归损失或平方损失都行,因为此时没有目标;
y = 1时,一般对pc采用平方损失或者逻辑回归的损失,对c1, c2, c3采用softmax的损失,对bx, by, bh, bw采用平方损失。
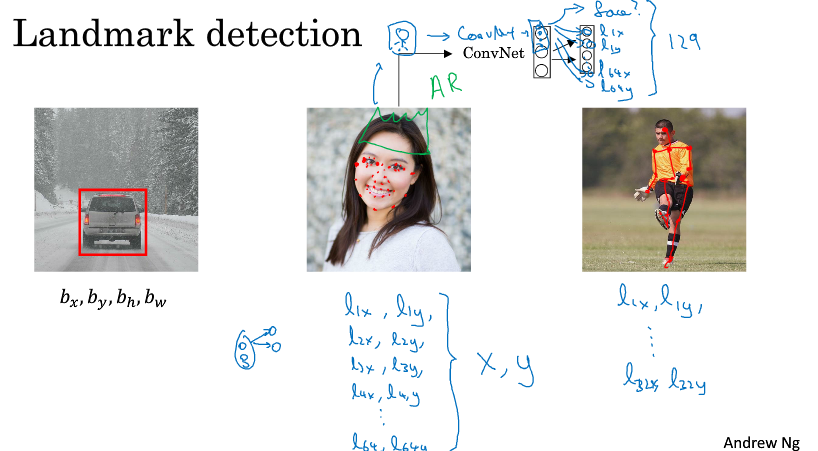
2 特征点检测( landmark detection )
假如你想标记出人脸中的特征位置(比如眼睛),对于神经网络的输出单元,首先有个face表示是否有人脸,然后是一系列的特征点的坐标,比如l1x, l1y, l2x, l2y, l3x, l3y, l4x, l4y表示四个特征点,表示左眼的外眼角和内眼角,右眼的外眼角和内眼角。
当然要训练这个网络,必须有标签好的数据,一般都是人为辛苦标注的。
这个检测脸部特征模块,是一个识别脸部表情的基本模块,也是计算机图形效果(比如实现头戴皇冠,脸部扭曲)的一个关键模块。
如果你对人体姿态检测感兴趣的话,也是使用类似上述的方法,先检测出人体姿态的关键特征点。
3 目标检测( object detection )
比如我们想做一个汽车的目标检测,首先先构建一个数据集,输入图像,输出图像是否为汽车,注意有汽车的图像中汽车要尽量占满整个画布且在正中央。
用这个数据集训练一个卷积神经网络,能够预测图像中是否为汽车。
然后可以利用滑动窗口的技术,先用小窗口,对新来的图像用窗口截取一段用网络判断是否为汽车,依次滑动窗口进行判断,对每个位置用0和1标记,直到滑过图像的每一个角落。然后增大窗口,重复操作,再增大一点窗口,重复操作。
滑动窗口的缺点就是计算成本太高,每次滑动都要用卷积来计算一次,这样滑动太慢了。
如果滑动stride小,则计算量大;如果stride大,可能无法准确定位到目标。
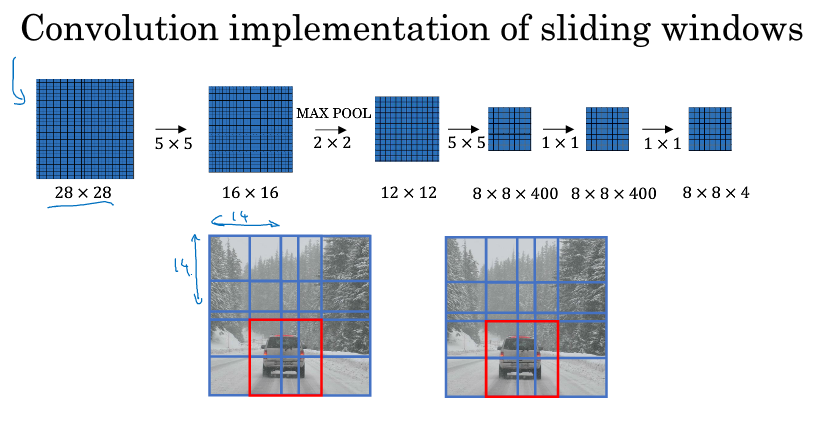
4 滑动窗口的卷积实现( Convolutional implementation of sliding windows )
事实上,我们不用像上一节中那样,自己去滑动窗口截取图片的一小部分然后检测,卷积这个操作就可以实现滑动窗口。
如下图中间一行卷积的初始图,我们假设输入的图像是16*16的,而窗口大小是14*14,我们要做的是把蓝色区域输入卷积网络,生成0或1分类,接着向右滑动2个元素,形成的区域输入卷积网络,生成0或1分类,然后接着滑动,重复操作。我们在16*16的图像上卷积了4次,输出了4个标签,我们会发现这4次卷积里很多计算是重复的。
而实际上,直接对这个16*16的图像进行卷积,如下图中间一行的卷积的整个过程,这个卷积就是在计算我们刚刚提到的很多重复的计算,过程中蓝色的区域就是我们初始的时候用来卷积的第一块区域,到最后它变成了2*2的块的左上角那一块,我们可以看到最后输出的2*2块,刚好就是4个输出,对应我们上面说的输出4个标签。
这两个过程刚好可以对应的上。所以我们不需要把原图分成四个部分,分为用卷积去检测,而是把它们作为一张图片输入给卷积网络进行计算,其中的公有区域可以共享很多计算。

我们不用依靠连续的卷积操作来识别图片中的汽车,我们可以对整张图片进行卷积,一次得到所有的预测值,如果足够幸运,神经网络便可以识别出汽车的位置。
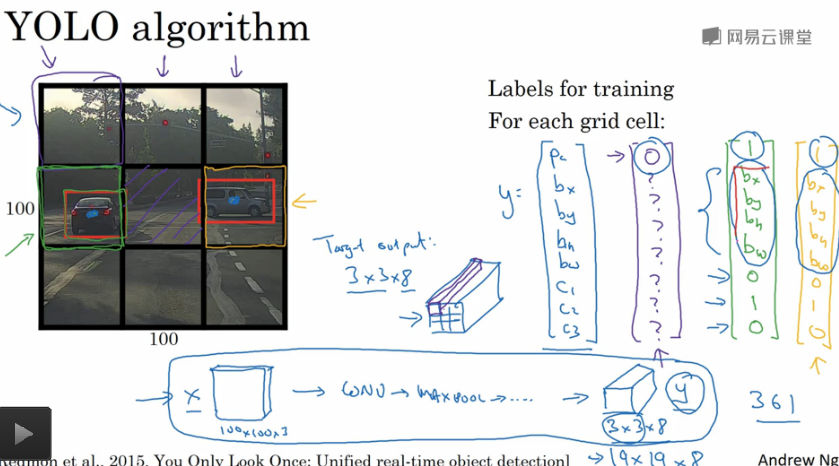
5 边界框预测( Bounding box prediction )
上一节的算法有一个缺点,就是边界框(bounding box)的位置可能不够准确,例如,可能你的框没有完美地框中汽车,而是框中了四分之三的样子。
其中一个能得到更精准的边界框的算法就是YOLO算法,YOLO的意思是you only look once。
怎么做的呢?假设我们的图像是100*100,我们在图像上放上3*3=9的网格(用3*3是为了介绍简单,实际实现会更精细,比如19*19)。
基本思路就是逐一在9个格子里使用目标定位。对于没有目标的格子,它的标签y就是pc为0,没啥好说的;
对于某个有目标的格子,按目标定位的方法贴上标签。需要注意的是,yolo会把目标分配到包含对象中点的那个格子里,所以如果车子的边缘跑到别的格子去了,我们会忽视那些边缘。
因为我们的标签有8个分量(参见前面说过的目标定位),所以最终的标签的shape是3*3*8。
我们要训练的卷积神经网络就是输入100*100*3的图像,输出3*3*8的标签。这样我们就可以得到精准的边界框了。
这个算法能够得到更准确的边界框而不用受限于滑动窗口的步长;其次这是一个卷积实现,我们并没有在9块区域跑9次算法,而是直接对整张图进行卷积的训练,因为在各个格子里的很多计算步骤是可以共享的。所以这个算法效率很高。
另外有个细节,关于bx, by, bh, bw,我们说格子左上角是(0, 0),右下角是(1, 1),那么这四个参数可以认为是在格子中占的比例大小,bx, by是(0,1)的,而bh, bw可能大于1,因为可能目标太大占了几个格子,指定边界框的方式有很多,这种约定是比较合理的。
6 交并比( Intersection over union)
交并比函数IoU是用来评判目标检测是否准确的,它做的就是计算预测边框和实际边框的交集和并集的比。
一般IoU大于等于0.5就说明检测正确,如果你希望严格点,可以定为0.6或0.7。
7 非极大值限制( Non-max suppression)
之前讲的yolo算法中,有个问题就是当一辆汽车占了很多个格子的时候,很多格子都会觉得它里面有辆车,所以算法可能会对同一对象做多次检测。
非最大值限制做的就是清理这些检测结果,使每个对象只被检测一次。具体怎么做,我们先假设目标只有一个,汽车,那么标签变成5个( pc, bx, by, bh, bw )
把图片分成19*19格子,对每一格子如果pc<=0.6,则丢弃,认为它不包含汽车。
对于剩下的格子,选择概率pc最高的框框,然后把跟这个框框的IoU很高(比如说>=0.5)的框框抑制;
然后再找概率最高的框框,接着把IoU(重叠)很高的框框抑制;
以此类推,最后把抑制的框框都去掉,这就是非最大值抑制。如果尝试同时检测三个目标的话,就对三个类独立地进行非最大值抑制。
8 Anchor Boxes
Anchor Boxes是处理一个格子出现多个目标的手段。
如下图所示,人和车重叠在了一起,这个时候可以预先定义不同形状的anchor box,这个例子中我们定义两个anchor box。
然后标签也变成原来的2倍,分别表示2个box:[ pc, bx, by, bh, bw, c1, c2, c3, pc, bx, by, bh, bw, c1, c2, c3 ]
对于第一个box,行人的形状,用标签的前8个表示,这里所有的参数都和检测行人有关。
对于第二个box,汽车的形状,用标签的后8个表示,这里所有的参数都和检测汽车有关。
之前,训练的每一个目标,都分配到包含中点的格子里。
现在,训练的每一个目标,都分配到(包含中点的格子,和目标IoU最高的anchor box)里。
如果你有2个anchor但是格子出现了3个目标,这种情况算法并没有很好的处理办法,但执行了默认的手段就是把两个对象放在一个格子里且它们的anchor是一样的,希望你的数据集不会出现这种情况。
如何选择anchor呢,人们一般手工指定anchor的形状,你可以选择5-10个anchor box覆盖多种不同的形状,涵盖你想要检测的对象的各种形状。
后期YOLO论文有更好的做法,用k-menas将两类对象的形状进行聚类,用它来选择一组anchor box。

9 yolo算法( yolo algorithm )
先根据上面讲述的内容,给训练样本贴好相应的标签,然后训练,预测。
最后要做非最大值抑制,步骤如下。
(1) 如果anchor box有两个,那么对于每个格子都会得到有两个边界框;
(2) 抛弃概率低的框框;
(3) 假设我们要预测三个目标,那么对每一个类,单独用非最大值抑制去得到最后的预测框框。
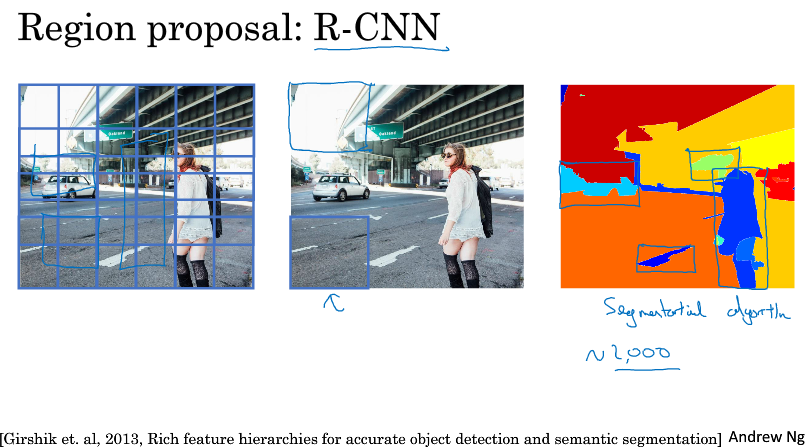
10 候选区域( Region proposals )
候选区域用的比较少,但是这个概念在计算机视觉领域的影响力很大,是个很有趣的想法。
我们之前讲的滑动窗口,它可能会在显然没有任何对象的区域上运算,这很没意义。
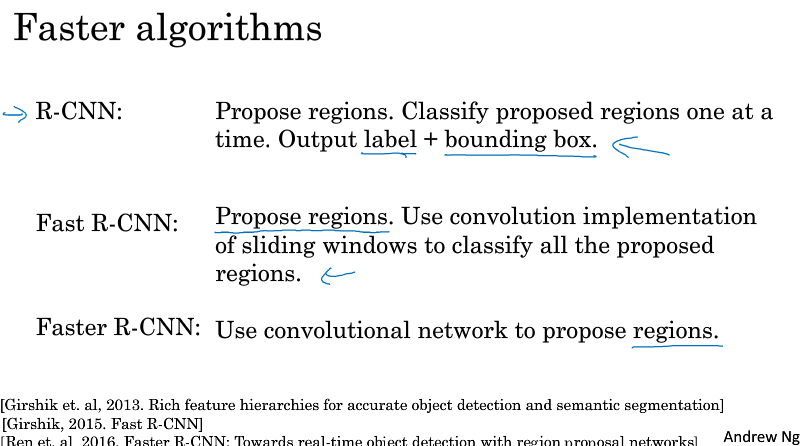
针对这个,有人提出了R-CNN,带区域的卷积网络,这个算法尝试选出一些区域,在这些区域上运行卷积网络分类器是有意义的。
选出候选区域的方法是运行图像分割算法,找一些色块,在这些色块上做卷积得到特征,然后(SVM)分类。
R-CNN运行还是挺慢的,所以有一系列的研究工作去改进这个算法。
比如Fast R-CNN,用了卷积(实现的滑动窗口)来进行分类,提高了速度,但是它得到候选区的速度还是挺慢的。
所以又提出了Faster R-CNN,用卷积去来获得候选区域色块,结果比Fast快很多。
ng-深度学习-课程笔记-13: 目标检测(Week3)的更多相关文章
- 深度学习课程笔记(十二) Matrix Capsule
深度学习课程笔记(十二) Matrix Capsule with EM Routing 2018-02-02 21:21:09 Paper: https://openreview.net/pdf ...
- 深度学习课程笔记(十一)初探 Capsule Network
深度学习课程笔记(十一)初探 Capsule Network 2018-02-01 15:58:52 一.先列出几个不错的 reference: 1. https://medium.com/ai% ...
- 深度学习课程笔记(二)Classification: Probility Generative Model
深度学习课程笔记(二)Classification: Probility Generative Model 2017.10.05 相关材料来自:http://speech.ee.ntu.edu.tw ...
- 深度学习课程笔记(十八)Deep Reinforcement Learning - Part 1 (17/11/27) Lectured by Yun-Nung Chen @ NTU CSIE
深度学习课程笔记(十八)Deep Reinforcement Learning - Part 1 (17/11/27) Lectured by Yun-Nung Chen @ NTU CSIE 201 ...
- 深度学习课程笔记(七):模仿学习(imitation learning)
深度学习课程笔记(七):模仿学习(imitation learning) 2017.12.10 本文所涉及到的 模仿学习,则是从给定的展示中进行学习.机器在这个过程中,也和环境进行交互,但是,并没有显 ...
- YOLO_Online 将深度学习最火的目标检测做成在线服务实战经验分享
YOLO_Online 将深度学习最火的目标检测做成在线服务 第一次接触 YOLO 这个目标检测项目的时候,我就在想,怎么样能够封装一下让普通人也能够体验深度学习最火的目标检测项目,不需要关注技术细节 ...
- 深度学习课程笔记(十七)Meta-learning (Model Agnostic Meta Learning)
深度学习课程笔记(十七)Meta-learning (Model Agnostic Meta Learning) 2018-08-09 12:21:33 The video tutorial can ...
- 深度学习课程笔记(十六)Recursive Neural Network
深度学习课程笔记(十六)Recursive Neural Network 2018-08-07 22:47:14 This video tutorial is adopted from: Youtu ...
- 深度学习课程笔记(十五)Recurrent Neural Network
深度学习课程笔记(十五)Recurrent Neural Network 2018-08-07 18:55:12 This video tutorial can be found from: Yout ...
随机推荐
- Zookeeper(三)-- JAVA原生API
一.前提 jar包:zookeeper-3.4.9.jar,slf4j-api-1.6.1.jar,slf4j-log4j12-1.6.1.jar,log4j-1.2.15.jar 二.Demo pa ...
- m4a文件在iOS上的流媒体播放
Date: 2016-03-23 Title: m4a文件在iOS上的流媒体播放 Tags: m4a, mp4, iOS, Android URL: m4a-streaming-play-on-mob ...
- ring0 根据EThread遍历线程
ntdll!_ETHREAD +0x000 Tcb : _KTHREAD +0x200 CreateTime : _LARGE_INTEGER 0xff58b008 +0x208 ExitTime : ...
- Apktool源码解析——第一篇
著名的apktool是android逆向界用的最普遍的一个工具,这个项目的原始地址在这里http://code.google.com/p/android-apktool/,但是你们都懂的在天朝谷歌是无 ...
- 原生JS,实现图片可拖拽,并且移动四个角和四条变能够自由变换图片大小
网上搜的资料,源码如下: <!DOCTYPE html> <html> <head> <meta charset="UTF-8"> ...
- GIT+ Coding使用方法
1 进入码市 :https://coding.net 注册一个账户 2 创建一个项目: 3 本地window环境.安装git : https://git-scm.com/download/win ...
- android基础---->Fragment的使用
碎片(Fragment)是一种可以嵌入在活动当中的UI 片段,它能让程序更加合理和充分地利用大屏幕的空间,因而在平板上应用的非常广泛. Fragment的基础例子
- weblogic jprofile配置
前提: 1.安装好weblogic 2.安装好jprofile 非等待模式: export JAVA_OPTIONS="${JAVA_OPTIONS} -Dweblogic.threadpo ...
- 【黑金原创教程】【Modelsim】Modelsim原创教程连载导读【连载完成,共六章】
[第一章]Modelsim仿真的扫盲文 [第二章]Modelsim就是电视机 [第三章]理想就是美丽 [第四章]激励文本就是仿真环境 [第五章]仿真就是人生 [第六章]结束就是开始
- Oracle各种表空间
system表空间:含数据字典信息 sysaux表空间:存储各种oracle应用的元数据(如AWR的操作数据) 创建表空间后,不能改变区尺寸 区尺寸管理:自动分配(AUTOALLOCATE):小段64 ...