ROS 下使用3D激光雷达 velodyne vlp-16
Velodyne VLP16型激光雷达横向视角360°,纵向视角30°
系统和ROS版本:Ubuntu 14.04 ,ros indigo
1. 安装驱动
sudo apt-get install ros-indigo-velodyne
2. 虚拟机VM->Setting
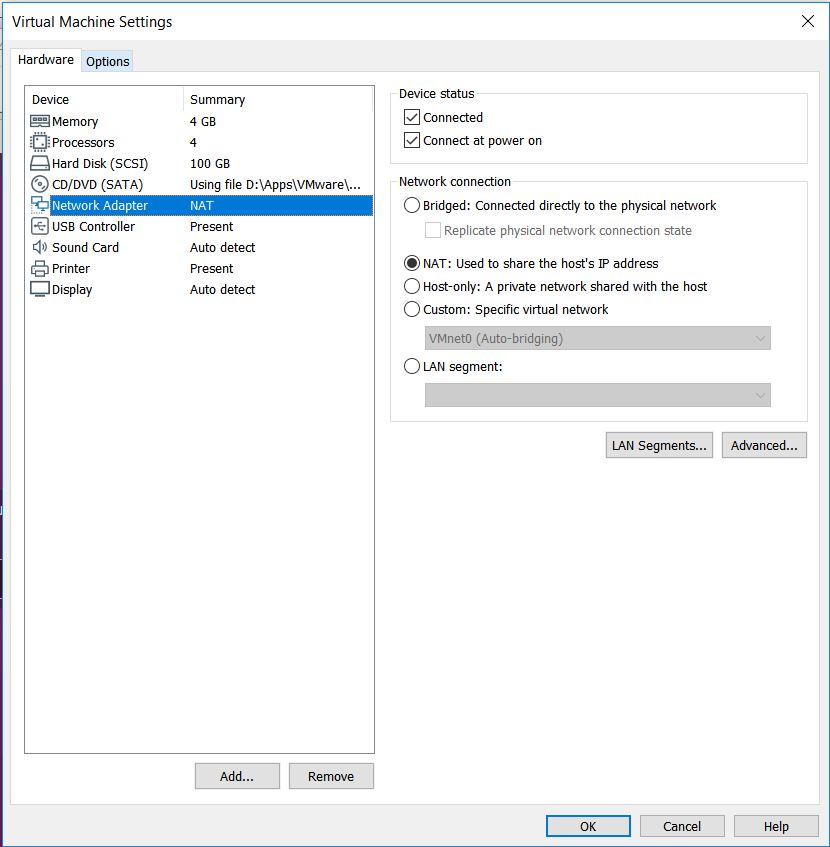
Network connection设置成为Bridged,然后将自己的IP设置成为接受激光数据的IP(主机和虚拟机此时必须在同一网段)
sudo ifconfig erh0 192.168.1.28 255.255.255.0
如果激光已经插入网口,此时打开虚拟机浏览器输入192.168.1.201可以看到激光雷达的配置文件。
3. 新建一个ROS的工程
mkdir -p catkin_velodyne/src
cd catkin_velodyne/src
git clone https://github.com/ros-drivers/velodyne.git
cd ..
catkin_make
source devel/setup.bash
4. 把Velodyne XML文件转成ROS节点的YAML文件(转换后生成VLP-16.yaml) (没有校准文件可以省略),或者去https://github.com/XinWenfei/useful下载(实际操作,转换不成功,所以我没用校准文件)
rosrun velodyne_pointcloud gen_calibration.py ~/filepath/VLP-16.xml
5. 加载
roslaunch velodyne_pointcloud VLP16_points.launch calibration:=/filepath/VLP-16.yaml
6. 实时显示点云图
rosrun rviz rviz -f velodyne //无法显示
#-f: set fixed frame
建议还是
rosrun rviz rviz
#之后在手动设置Fixed Frame= velodyne
然后在rviz中点Add by topic,增加PointCloud2,这样就可以实时显示获取的3D点云图
7. 记录数据
rosbag record -O saved_filename /velodyne_points
ROS 下使用3D激光雷达 velodyne vlp-16的更多相关文章
- ROS机器人程序设计(原书第2版)补充资料 (肆) 第四章 在ROS下使用传感器和执行器
ROS机器人程序设计(原书第2版)补充资料 (肆) 第四章 在ROS使用传感器和执行器 书中,大部分出现hydro的地方,直接替换为indigo或jade或kinetic,即可在对应版本中使用. 第四 ...
- LSD-SLAM深入学习(1)-基本介绍与ros下的安装
前言 借鉴来自RGB-D数据处理的两种方法-基于特征与基于整体的,同样可以考虑整个图片的匹配,而不是只考虑特征点的…… 一般这种稠密的方法需要很大的计算量,DTAM: Dense tracking a ...
- ros下多机器人系统(1)
multi-robot system 经过两个多月的ros学习,对ros的认识有了比较深入的了解,本篇博客主要记录在ros下开发多机器人系统以及对ros更深入的开发.本篇博客是假定读者已经学习完了全部 ...
- ZED 相机 && ORB-SLAM2安装环境配置与ROS下的调试
注:1. 对某些地方进行了更新(红色标注),以方便进行配置. 2. ZED ROS Wrapper官方github已经更新,根据描述新的Wrapper可能已经不适用与Ros Indigo了,如果大家想 ...
- pl-svo在ROS下运行笔记
一.程序更改的思路(参考svo_ros的做法): 1.在ROS下将pl-svo链接成库需要更改相应的CMakeLists.txt文件,添加package.xml文件: 2.注册一个ROS节点使用svo ...
- ORB-SLAM2(2) ROS下配置和编译
1配置USB相机 1.1网友参考: http://www.liuxiao.org/2016/07/ubuntu-orb-slam2-%E5%9C%A8-ros-%E4%B8%8A%E7%BC%96%E ...
- Windows 7硬盘安装CentOS 6.4 双系统 (WIN7下硬盘安装Linux(Fedora 16,CentOS 6.2,Ubuntu 12.04))
WIN7下硬盘安装Linux(Fedora 16,CentOS 6.2,Ubuntu 12.04) 最近在看<鸟哥私房菜:基础学习篇>,觉得很不错,想要用U盘装个windows 7 和 ...
- ros下基于百度语音的,语音识别和语音合成
代码地址如下:http://www.demodashi.com/demo/13153.html 概述: 本demo是ros下基于百度语音的,语音识别和语音合成,能够实现文字转语音,语音转文字的功能. ...
- ROS下使用ASUS Xtion Pro Live
一.ROS官网hydro版本OpenNI安装 3. Installation 3.1 Ubuntu installation To install only openni_camera: sudo a ...
随机推荐
- PHP读取文件函数fread,fgets,fgetc,file_get_contents和file函数的使用总结
fread().fgets().fgetc().file_get_contents() 与 file() 函数用于从文件中读取内容. 1.fread() fread()函数用于读取文件(可安全用于二进 ...
- CodeForces - 662A:Gambling Nim (求有多少个子集其异或为S)(占位)
As you know, the game of "Nim" is played with n piles of stones, where the i-th pile initi ...
- NET Core中使用MediatR实现命令和中介者模式
NET Core中使用MediatR实现命令和中介者模式 https://www.cnblogs.com/yilezhu/p/9866068.html 在本文中,我将解释命令模式,以及如何利用基于命令 ...
- 在JVM中,新生代和旧生代有何区别?GC的回收方式有几种?server和client有和区别?
在JVM中,新生代和旧生代有何区别?GC的回收方式有几种?server和client有和区别? 2014-04-12 12:09 7226人阅读 评论(0) 收藏 举报 分类: J2SE(5) 一 ...
- SqlServer2008 新建服务器对象->链接服务器脚本
exec sp_addlinkedserver 'ddxx', '', 'SQLOLEDB','1.192.168.220'exec sp_addlinkedsrvlogin 'ddxx','fa ...
- UIImage+PYJAnimatedGIF
UIImage+PYJAnimatedGIF.h: #import <UIKit/UIKit.h> @interface UIImage (PYJAnimatedGIF) + (UIIma ...
- throw、try 和 catch
try 语句允许我们定义在执行时进行错误测试的代码块. catch 语句允许我们定义当 try 代码块发生错误时,所执行的代码块. JavaScript 语句 try 和 catch 是成对出现的. ...
- yii 操作cookie
原文地址:http://blog.sina.com.cn/s/blog_664c9f650100yqkn.html 设置cookie: $cookie = new CHttpCookie('mycoo ...
- Weblogic配置SSl使用Https
一 .可以开启自带的SSL连接 启动weblogic,进入左侧菜单,点击左侧的安全领域-->点击myrealm-->点击角色和策略-->点击服务器AdminServer 点击保存,w ...
- (转)java.lang.RuntimeException: Missing type parameter
java.lang.RuntimeException: Missing type parameter (2015-04-07 14:35:51) 分类: 技术 程序中用到了gson的new typ ...