目标检测论文解读9——R-FCN
背景
基于ResNet 101的Faster RCNN速度很慢,本文通过提出Position-sensitive score maps(位置敏感分值图)来给模型加速。
方法
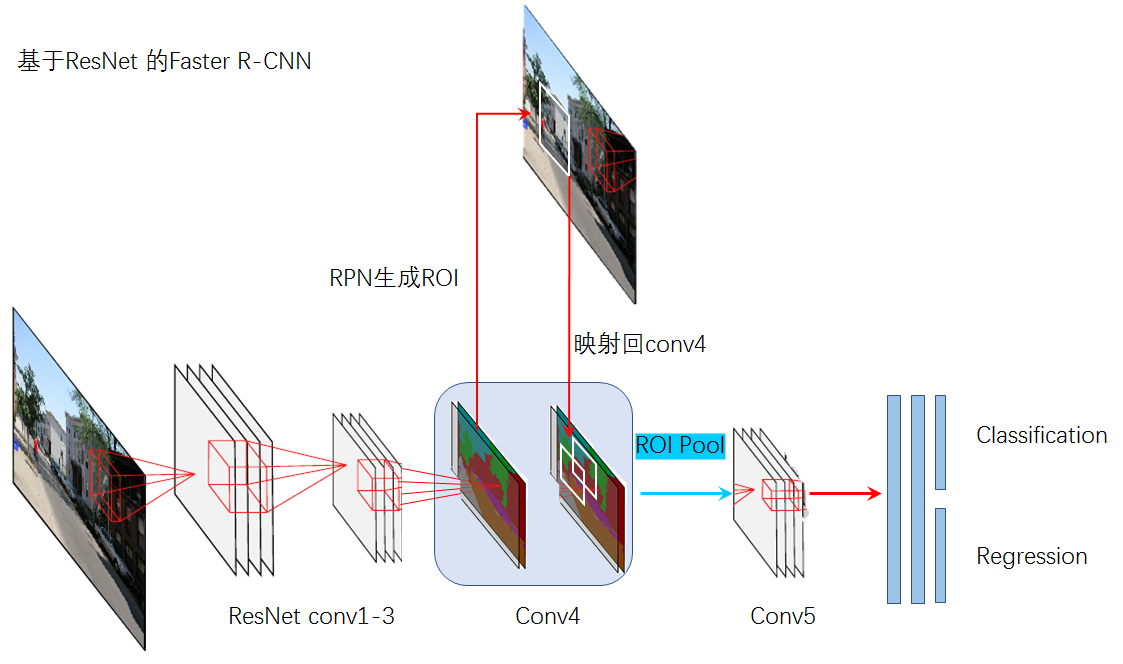
首先分析一下,为什么基于ResNet 101的Faster R-CNN很慢?
其实主要的原因是ROI Pooling层后面的Conv5无法共享计算,每一个RoI都要计算一次,一次检测RoI可能有几百个,计算量巨大。
我们已经知道Conv层的作用是提取特征,那为什么不跟把Conv5放到RoI Pooling前面,让RoI映射到Conv5输出的feature map呢?
这是因为Conv5会使feature map进一步压缩,w*h变小,feature map小了,位置敏感性显然会降低,从而检测的结果不准。
于是,作者提出了一种兼顾速度和准度的结构。
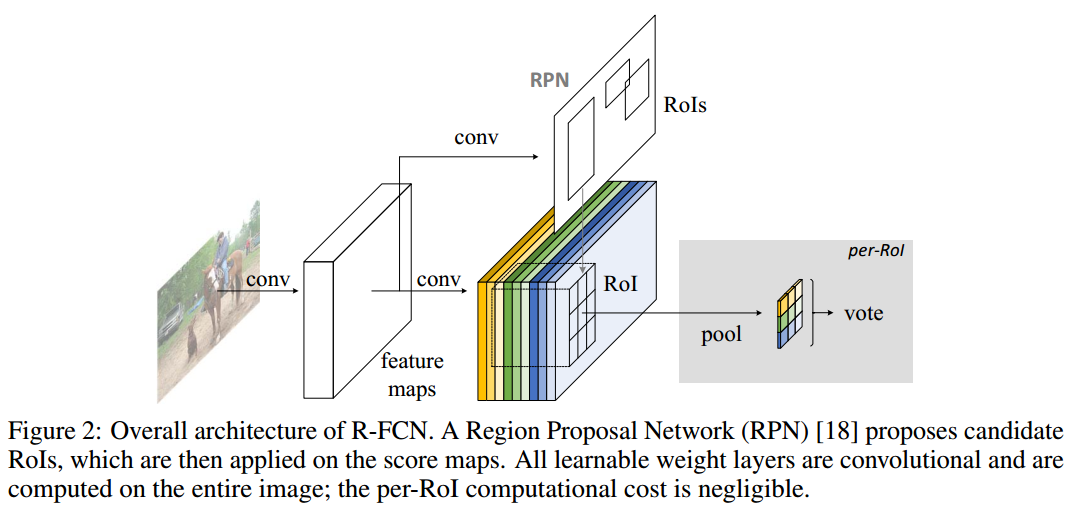
观察上面的模型,我们可以看到,在RoI pooling层后面用来提取特征的Conv层都放到前面了,所以共享了计算,速度加快。
同时,作者提出一种Position-sensitive score maps的方法来解决位置信息丢失,大致是这样的。
原图片经过一系列的Conv层,输出一个channel为k*k*(C+1)的feature map,k=3,代表一张图片的九宫格各位置,C为类别数。可以看到feature map的每一个点,都是k*k*(C+1)-d的feature vector,其中包含了这个点在某位置且为某类的得分信息。
RPN提出的RoI,映射到feature map中,也被分为k*k个bin。
接下来,进行一次Position-sensitive RoI pooling(位置敏感池化)操作。步骤如下:找到一个左上角的bin,然后找到他所对应的(C+1)-d的类别得分信息,可以对w*h的bin的类别信息进行平均池化,得到一个(C+1)的类别信息;其他8个位置也按照同样步骤。
经过这一步,就能得到一个k*k*(C+1)的feature map,再对k*k个(C+1)的vector平均一次(论文用的方法),得到(C+1)的vector,softmax返回一个概率最大的类别就行了。
总结
可以看到,之所以作者的方法之所以位置精度高,主要是因为他把问题从给一个RoI分类转变成了给一个RoI的九个位置分类,从而提高了位置敏感度。
目标检测论文解读9——R-FCN的更多相关文章
- AAAI2019 | 基于区域分解集成的目标检测 论文解读
Object Detection based on Region Decomposition and Assembly AAAI2019 | 基于区域分解集成的目标检测 论文解读 作者 | 文永亮 学 ...
- 目标检测论文解读5——YOLO v1
背景 之前热门的目标检测方法都是two stage的,即分为region proposal和classification两个阶段,本文是对one stage方法的初次探索. 方法 首先看一下模型的网络 ...
- 目标检测论文解读1——Rich feature hierarchies for accurate object detection and semantic segmentation
背景 在2012 Imagenet LSVRC比赛中,Alexnet以15.3%的top-5 错误率轻松拔得头筹(第二名top-5错误率为26.2%).由此,ConvNet的潜力受到广泛认可,一炮而红 ...
- 目标检测论文解读10——DSSD
背景 SSD算法在检测小目标时精度并不高,本文是在在SSD的基础上做出一些改进,引入卷积层,能综合上下文信息,提高模型性能. 理解 Q1:DSSD和SSD的区别有哪些? (1)SSD是一层一层下采样, ...
- 目标检测论文解读13——FPN
引言 对于小目标通常需要用到多尺度检测,作者提出的FPN是一种快速且效果好的多尺度检测方法. 方法 a,b,c是之前的方法,其中a,c用到了多尺度检测的思想,但他们都存在明显的缺点. a方法:把每图片 ...
- 目标检测论文解读12——RetinaNet
引言 这篇论文深刻分析了one-stage的模型精度比two-stage更差的原因,并提出Focal Loss提高精度. 思路 在论文中,作者指出,造成one-stage模型精度差的原因主要是:正负样 ...
- 目标检测论文解读3——Fast R-CNN
背景 deep ConvNet兴起,VGG16应用在图像分类任务上表现良好,本文用VGG16来解决检测任务.SPP NET存在CNN层不能fine tuning的缺点,且之前的方法训练都是分为多个阶段 ...
- 目标检测论文解读11——Mask R-CNN
目的 让Faster R-CNN能做实例分割的任务. 方法 模型的结构图如下. 与Faster R-CNN相比,主要有两点变化. (1) 用RoI Align替代RoI Pool. 首先回顾一下RoI ...
- 目标检测论文解读6——SSD
背景 R-CNN系列算法检测速度不够快,YOLO v1检测准确率较低,而且无法检测到密集目标. 方法 SSD算法跟YOLO类似,都属于one stage的算法,即通过回归算法直接从原图得到预测结果,为 ...
随机推荐
- 仅逗oier们一笑(不定期更新中)(update.2019年12月8日)
CCF的正确解释: //部分来自:朝阳的二愣子的CSDN博客.ydclyq 的博客 .拱垲的博客.Randolph's Blog. 编译下列程序,会有意想不到的惊喜哦(注意打开声音): #includ ...
- 利用ANSYS进行橡胶坝的静力分析和模态计算
这个是我一个同学的毕业论文,我也帮了一点小忙,所以征得同学同意,把相关的经验共享一下(当时候做得也很艰难,网上查到的可参考的资料太少了,而且没有具体步骤). 先占一个位子,以前的模型还有命令流文件都找 ...
- RabbitMQ心跳检测与掉线重连
1.RabbitMQListener,自定义消息监听器 using RabbitMQ.Client; using RabbitMQ.Client.Events; using System; using ...
- (十三)golang--程序流程控制
1.顺序控制 若没有判断,没有跳转,程序由上至下依次执行 2.分支控制 单分支if 条件表达式 { 执行代码块} 双分支if 条件表达式 { 执行代码块1} else { 执行代码块2} 多分支if ...
- 使用numpy处理数组
def fun_ndarray(): a = [[1,2,7], [-6,-2,-3], [-4,-8,-55] ] b = np.array(a) b = np.abs(b)#取数组的绝对值 pri ...
- CentOS升级Python2.6到Python2.7并安装pip[转载]
貌似CentOS 6.X系统默认安装的Python都是2.6版本的?平时使用以及很多的库都是要求用到2.7版本或以上,所以新系统要做的第一件事必不可少就是升级Python啦!在这里做个简单的升级操作记 ...
- [转帖]龙芯3A4000处理器实测:28nm工艺不变 性能仍可提升100%以上
龙芯3A4000处理器实测:28nm工艺不变 性能仍可提升100%以上 http://news.mydrivers.com/1/663/663122.htm 龙芯是中科院下属的计算机所研发的自主产权国 ...
- java.lang.NoClassDefFoundError: javax/el/ELManager
今天搭建一个ssm框架的项目,报了一个令我怀疑人生的错误: java.lang.NoClassDefFoundError: javax/el/ELManager 网上说出现这种错,大概有以下两个原因: ...
- 将本地代码提交到github上
首先点击new,创建一个github仓库. 设置仓库名称. 这时候你需要创建一个ssh密匙,桌面右键Git Bash Here.敲入命令.cd ~/.ssh/,如果提示"no such&qu ...
- 如何在windows 7 上使用docker
在window7上面本来是支持使用docker的, 但是我们可以通过安装docker toolbox来实现在windows7上使用docker. 参考网址: https://docs.docker.c ...