ORB-SLAM2初步
一、ORB-SLAM简介
最近开始入坑SLAM,经过简单调研,各位大咖认为,目前最优秀的视觉SLAM系统是ORB-SLAM2,因此对ORB-SLAM2进行了学习。
ORB-SLAM2是2015年提出的支持单目、双目、RGB-D相机三种工作模式的SLAM系统。整个系统基于ORB特征实现,包含了跟踪定位、局部地图构建、回环检测三个主线程。通常认为ORB-SLAM是基于PTAM的而进一步发展的,包含了目前流行SLAM系统的主要模块。整个系统在PC端运行帧率可达30帧,由于使用了自动初始化、重定位、回环检测等,具备较好的鲁棒性和准确性。官网网址为:http://webdiis.unizar.es/~raulmur/orbslam/。
二、ORB-SLAM三线程分析
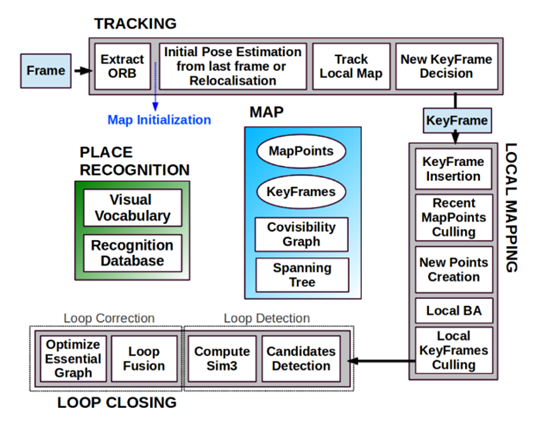
如上图所示,三线程为Tracking、LocalMapping、LoopClosing。
(1)跟踪模块:主要是通过提取每一帧的ORB特征,通过恒速模型、关键帧模型、重定位估计相机初始位姿,然后通过共视关系跟踪局部局部地图来优化相机位姿进行优化,最后确定当前帧是否作为关键帧插入地图中。
(2)局部建图:主要是针对跟踪过程中产生的关键帧进行操作,包括把该关键帧插入到地图中,添加新的地图点,剔除冗余的关键帧、地图点,通过Local BA优化相机位姿和地图点。
(3)回环检测:同样针对关键帧进行操作,主要是通过BoW模型判断当前关键帧是否产生回环,如果产生可能的回环则进行回环一致性检测,通过一致性检测之后认为运动已经产生回环,则计算Sim3变换进行回环矫正,并另起线程进行全局优化。
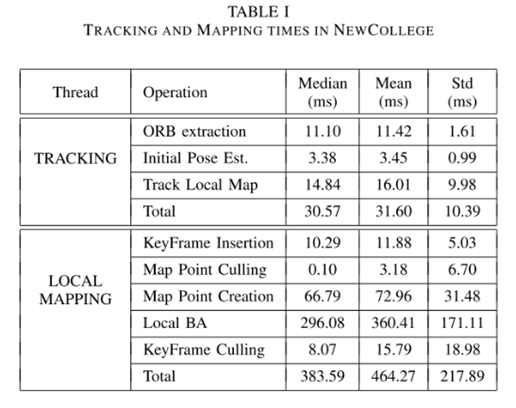
其中跟踪模块需要处理摄像头获取的每一帧图像,从而实时估计相机位姿,而局部建图和回环检测通常只针对关键帧进行操作,因此不需要实时运行。下面贴了作者测试的时间分布情况:
学习ORB-SLAM2过程中参考了很多大咖的博客(都是可以百度出来的):
http://blog.csdn.net/u010128736/article/details/53157605
http://www.cnblogs.com/gaoxiang12/p/5161223.html
。。。。
安装配置的过程网上的教程已经很多了,这里就不在赘述了。上面这些都是网上现成的,后面将给出自己学习过程中理解的具体细节。
ORB-SLAM2初步的更多相关文章
- orb slam2 双目摄像头
主要参考了http://blog.csdn.net/awww797877/article/details/51171099这篇文章,其中需要添加的是:export ROS_PACKAGE_PATH=$ ...
- ORB SLAM2在Ubuntu 16.04上的运行配置
http://www.mamicode.com/info-detail-1773781.html 安装依赖 安装OpenGL 1. 安装opengl Library$sudo apt-get inst ...
- 关于ORB SLAM2资源整理(持续更新)
ORB SLAM2源码讲解(吴博) https://www.youtube.com/watch?v=2GVE7FTW7AU 泡泡机器人视频整理: http://space.bilibili.com/3 ...
- ORB SLAM2 学习笔记
cd ~/Documents/demos/ORB_SLAM2 ./Examples/RGB-D/rgbd_tum Vocabulary/ORBvoc.txt Examples/RGB-D/TUM1.y ...
- Ubuntu14.04 使用本地摄像头跑ORB SLAM2(暂未完成)
嗯 这个方法我暂时弄不出来,用了另外一个方法:SLAM14讲 第一次课 使用摄像头或视频运行 ORB-SLAM2 前面的准备: Ubuntu14.04安装 ROS 安装步骤和问题总结 Ubuntu14 ...
- orb slam2
- 使用 evo 工具评测 VI ORB SLAM2 在 EuRoC 上的结果
http://www.liuxiao.org/2017/11/%E4%BD%BF%E7%94%A8-evo-%E5%B7%A5%E5%85%B7%E8%AF%84%E6%B5%8B-vi-orb-sl ...
- Ubuntu16.04+Ros+Usb_Cam ORB SLAM2
转载自:https://www.jianshu.com/p/dbf39b9e4617亲测可用 1.其中编译ORB_SLAM2的 ./build.sh 和 ./build_ros.sh之前需要修改文 ...
- 最近一年语义SLAM有哪些代表性工作?
点击"计算机视觉life"关注,置顶更快接收消息! 本文由作者刘骁授权发布,转载请联系原作者,个人主页http://www.liuxiao.org 目前 Semantic SLAM ...
- SLAM学习笔记 - ORB_SLAM2源码运行及分析
参考资料: DBow2的理解 单目跑TUM数据集的运行和函数调用过程 跑数据集不需要ros和相机标定,进入ORB_SLAM目录,执行以下命令: ./Examples/Monocluar/mono_tu ...
随机推荐
- Windows7运行python3,提示缺少api-ms-win-crt-runtime-l1-1.0.dll
一.实验环境 1.Windows7x64_SP1 二.操作步骤 2.1 python官网下载python3.6后,安装.运行,提示如下错误: 2.2 解决方式 去微软官网下载安装:KB2999226补 ...
- 单个视频播放控制&默认横屏播放
一.视频列表中控制只允许一个视频播放 // 获取DOM中所有的video标签 var videoTags = document.querySelectorAll('video'); // 控制播放的视 ...
- picture元素的使用
前言 相信前端小伙伴们对img元素已经烂熟于心,但不知是否了解picture元素呢? 简单来说,picture元素通过包含一个或多个<source>元素和一个<img>元素再结 ...
- poj-2234 Matches Game Nim
Matches Game Time Limit: 1000MS Memory Limit: 65536K Total Submissions: 13264 Accepted: 7712 Des ...
- Dubbo从入门到实战:入门篇
很多时候,其实我们使用这个技术的时候,可能都是因为项目需要,所以,我们就用了,但是,至于为什么我们需要用到这个技术,可能自身并不是很了解的,但是,其实了解技术的来由及背景知识,对于理解一项技术还是有帮 ...
- 初探云原生应用管理(一): Helm 与 App Hub
系列介绍:初探云原生应用管理系列是介绍如何用云原生技术来构建.测试.部署.和管理应用的内容专辑.做这个系列的初衷是为了推广云原生应用管理的最佳实践,以及传播开源标准和知识.通过这个系列,希望帮 ...
- sysstat工具包之mpstat
mpstat 1 简介 mpstat是一个实时监控工具,主要报告与CPU相关统计信息,信息存放在/proc/stat文件中: 在多核心cpu系统中,不仅可以查看cpu平均信息,还可以查看指定cpu信息 ...
- C#网页 截图
using System.IO; using System.Drawing; using System.Drawing.Imaging; using System.Threading; using S ...
- Winform中设置ZedGraph因设置小刻度导致的竖直虚线显示过多
场景 Winforn中设置ZedGraph曲线图的属性.坐标轴属性.刻度属性: https://blog.csdn.net/BADAO_LIUMANG_QIZHI/article/details/10 ...
- 2019 梆梆安全java面试笔试题 (含面试题解析)
本人5年开发经验.18年年底开始跑路找工作,在互联网寒冬下成功拿到阿里巴巴.今日头条.梆梆安全等公司offer,岗位是Java后端开发,因为发展原因最终选择去了梆梆安全,入职一年时间了,也成为了面 ...