基于STM32F429和Cube的主从定时器多通道输出固定个数的PWM波形
主从定时器的原理已在上篇博文:
基于STM32F429+HAL库编写的定时器主从门控模式级联输出固定个数PWM脉冲的程序
讲解了,这篇重点就讲如何实现多通道的PWM级联输出。
1.软件环境
Keil5,Cube5.21
2.Cube配置
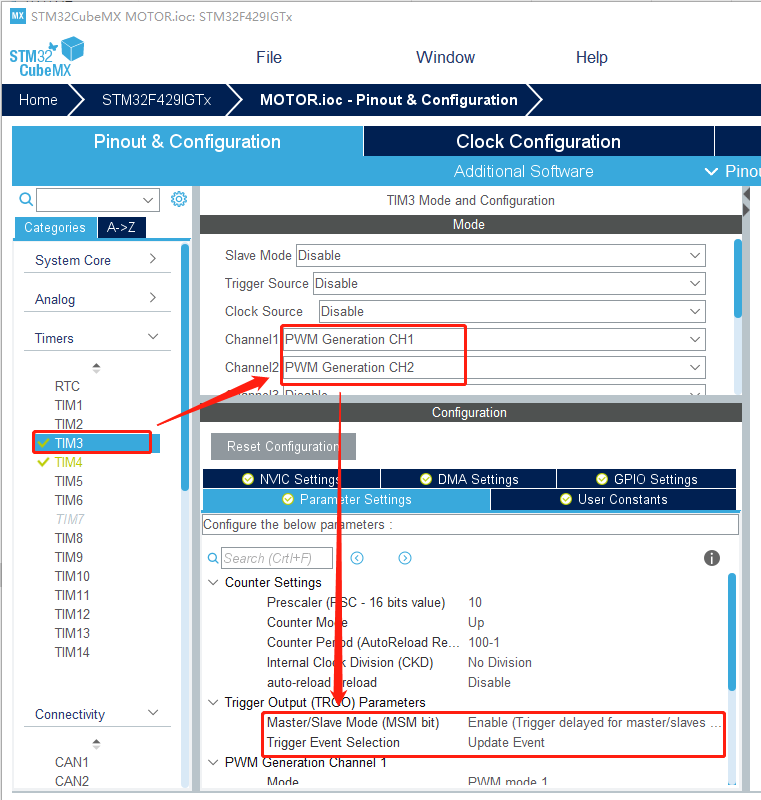
选择定时器3,打开通道1和通道2的PWM输出,然后开启主从模式,触发方式为上升沿触发。
频率和占空比的设置请看上篇博文。
生成的代码 如下
void MX_TIM3_Init(void)
{
TIM_MasterConfigTypeDef sMasterConfig = {};
TIM_OC_InitTypeDef sConfigOC = {}; htim3.Instance = TIM3;
htim3.Init.Prescaler = ;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = -;
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_PWM_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_UPDATE;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_ENABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = ;
sConfigOC.OCPolarity = TIM_OCPOLARITY_LOW;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_2) != HAL_OK)
{
Error_Handler();
}
HAL_TIM_MspPostInit(&htim3); }
选择定时器4,从模式为门控模式,触发时钟为TIM3,即ITR2,内部时钟触发
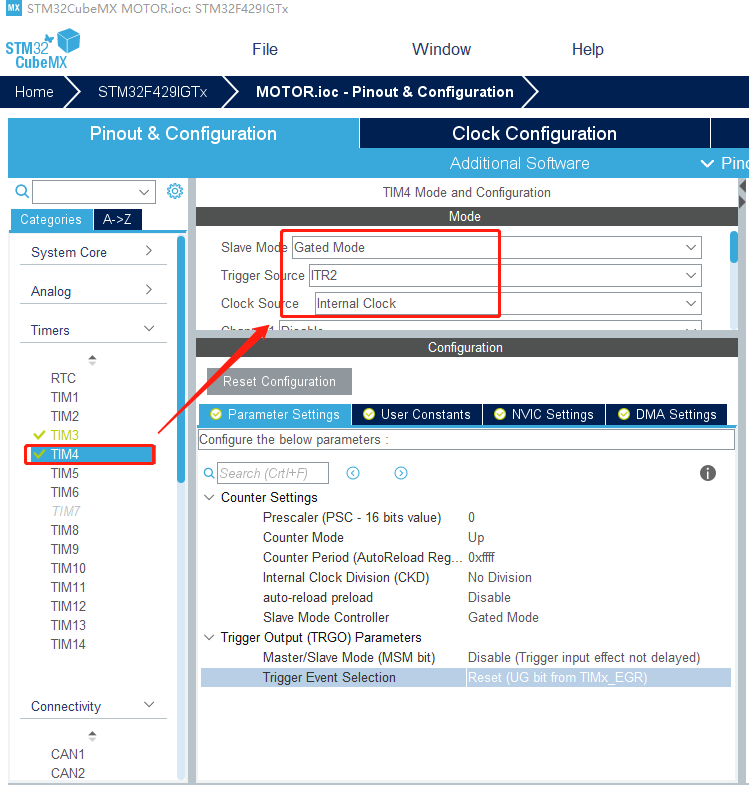

生成的代码如下:
/* TIM4 init function */
void MX_TIM4_Init(void)
{
TIM_ClockConfigTypeDef sClockSourceConfig = {};
TIM_SlaveConfigTypeDef sSlaveConfig = {};
TIM_MasterConfigTypeDef sMasterConfig = {}; htim4.Instance = TIM4;
htim4.Init.Prescaler = ;
htim4.Init.CounterMode = TIM_COUNTERMODE_UP;
htim4.Init.Period = 0xffff;
htim4.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim4.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim4) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim4, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
sSlaveConfig.SlaveMode = TIM_SLAVEMODE_GATED;
sSlaveConfig.InputTrigger = TIM_TS_ITR2;
if (HAL_TIM_SlaveConfigSynchro(&htim4, &sSlaveConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim4, &sMasterConfig) != HAL_OK)
{
Error_Handler();
} }
STM32F429的定时器3通道1,2的PWM复用口
PA6 ------> TIM3_CH1
PA7 ------> TIM3_CH2
3,程序介绍
(1)在主函数里开启定时器的中断功能和PWM输出
TIM_SET_CAPTUREPOLARITY(&htim3,TIM_CHANNEL_1,TIM_ICPOLARITY_RISING) ; // 捕获比较1中断使能
TIM_SET_CAPTUREPOLARITY(&htim3,TIM_CHANNEL_2,TIM_ICPOLARITY_RISING) ; // 捕获比较2中断使能 __HAL_TIM_SET_COMPARE(&htim4,TIM_CHANNEL_1,) ; // 输入通道1的捕获比较值CCR1 ,PWM个数为6400个
__HAL_TIM_SET_COMPARE(&htim4,TIM_CHANNEL_2,) ; // 输入通道2的捕获比较值CCR2 HAL_TIM_OC_Start_IT(&htim4,TIM_CHANNEL_1) ; //开启定时器4通道1的输入捕获中断
HAL_TIM_OC_Start_IT(&htim4,TIM_CHANNEL_2) ; //开启定时器4通道2的输入捕获中断 PostInit(); //这个是为了控制通道2的复用GPIO口PA7,可忽略 HAL_TIM_PWM_Start_IT(&htim3, TIM_CHANNEL_1); //开启定时器3通道1的PWM输出中断
HAL_TIM_PWM_Start_IT(&htim3, TIM_CHANNEL_2); //开启定时器3通道2的PWM输出中断
(2)在PWM中断轮询函数关闭定时器的中断功能和PWM输出
void HAL_TIM_PWM_PulseFinishedCallback(TIM_HandleTypeDef *htim) //重写PWM中断轮询弱函数
{ if(__HAL_TIM_GET_FLAG(htim, TIM_FLAG_CC1) != RESET) //判断是否生成中断标志位SR
{
if(__HAL_TIM_GET_IT_SOURCE(htim, TIM_IT_CC1) !=RESET) //定时器中断使能是否开启
{ __HAL_TIM_CLEAR_FLAG(&htim4, TIM_FLAG_CC1); //清除中断标志位SR
if(HAL_TIM_PWM_Stop_IT(&htim3, TIM_CHANNEL_1)==HAL_OK) //关闭定时器3的通道1的PWM输出
{
HAL_TIM_OC_Stop_IT(&htim4,TIM_CHANNEL_1) ; //关闭定时器4的通道1的输入中断捕获
FLAG1_OK = ; //关闭标志置1 } }
} //下面的通道2同理如此
if(__HAL_TIM_GET_FLAG(htim, TIM_FLAG_CC2) != RESET)
{
if(__HAL_TIM_GET_IT_SOURCE(htim, TIM_IT_CC2) !=RESET)
{ __HAL_TIM_CLEAR_FLAG(&htim4, TIM_FLAG_CC2); //清除标志位 PostDeInit(); //这个是为了控制通道2的复用GPIO口PA7,可忽略 if(HAL_TIM_PWM_Stop_IT(&htim3, TIM_CHANNEL_2)==HAL_OK)
{
HAL_TIM_OC_Stop_IT(&htim4,TIM_CHANNEL_2) ; FLAG2_OK = ;
} } } if( FLAG1_OK == &&FLAG2_OK == )
{
FLAG1_OK = ;
FLAG2_OK = ;
FLAG1_Static =; __HAL_TIM_SET_COUNTER(&htim4,); //如果两个通道都关闭好了,就把计数装载值CNT清零 TIM_CCxChannelCmd(TIM3,TIM_CHANNEL_2,TIM_CCx_ENABLE); //这个是为了控制通道2的复用GPIO口PA7,可忽略 //
//Delay100ms();
} }
重头戏来了!!!如果你发现以上代码,通道1,2的GPIO口只能输出通道1的波形,说明你的中断只是进了通道1的,但通道2也触发了
原因就是两者的中断标志位都被清零了,而且是HAL库自动清零的。
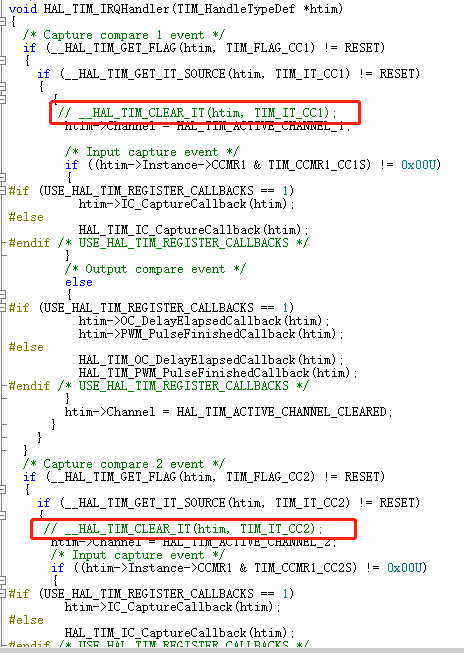
两个被注释掉的函数就是HAL库帮你清零的语句,你手动注释掉就行了。
4.注意事项
(1)小心使用延迟函数,定时器可能和延迟函数有冲突;
(2)如果你发现你不能输出超过255个波形,那就在初始化哪里加个__HAL_TIM_SET_AUTORELOAD(&htim4, 0xffff) ,
既往ARR装载0xffff。
(3)下图的3个函数是用来调控PA7这个PWM复用口的,如果你发现你的PWM波形神奇的自动下降沿计数的话,就用来试下吧。
void PostDeInit(void)
{ GPIO_InitTypeDef GPIO_InitStruct = {}; __HAL_RCC_GPIOA_CLK_ENABLE(); GPIO_InitStruct.Pin =GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_PULLDOWN;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
// GPIO_InitStruct.Alternate = 0x00;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); } void PostInit(void)
{ GPIO_InitTypeDef GPIO_InitStruct = {}; __HAL_RCC_GPIOA_CLK_ENABLE(); GPIO_InitStruct.Pin =GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = 0x02; HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); } TIM_CCxChannelCmd(TIM3,TIM_CHANNEL_2,TIM_CCx_ENABLE);
基于STM32F429和Cube的主从定时器多通道输出固定个数的PWM波形的更多相关文章
- 基于STM32F429+HAL库编写的定时器主从门控模式级联输出固定个数PWM脉冲的程序
硬件设备 42步进电机,步进电机驱动器,正点原子F429开发板 开发软件 keil5,Cube 综述 一般要精准的控制电机,就要控制单片机的引脚输出指定个数的PWM波,有多种可实现的方法 ...
- 基于STM32F429和Cube的ov2640程序
1.ov2640和DCMI介绍 OV2640 是 OV(OmniVision)公司生产的一颗 1/4 寸的 CMOS UXGA(1632*1232)图 像传感器.该传感器体积小.工作电压低,提供单片 ...
- 基于Camera Link和PCIe DMA的多通道视频采集和显示系统
基于Camera Link和PCIe DMA的多通道视频采集和显示系统 在主机端PCIe驱动的控制和调度下,视频采集与显示系统可以同时完成对多个Camera Link接口视频采集以及Camera Li ...
- STM32F103ZET6 用定时器级联方式输出特定数目的PWM(转载)
STM32F103ZET6里共有8个定时器,其中高级定时器有TIM1-TIM5.TIM8,共6个.这里需要使用定时器的级联功能,ST的RM0008 REV12的P388和P399页上有说明对于特定的定 ...
- PHP 定时器 边输出边刷新网页
使用定时器的时候当然想网页能够看到输出,不希望网页直接卡住,定时器结束输出一片. 要做到定时器不卡住输出,只需要两个函数就行了,看下面代码 <?php //定时器测试代码 demo //跟踪定时 ...
- STM32F103ZET6 用定时器级联方式输出特定数目的PWM
STM32F103ZET6 用定时器级联方式输出特定数目的PWM STM32F103ZET6里共有8个定时器,其中高级定时器有TIM1-TIM5.TIM8,共6个. 这里需要使用定时器的级联功能,ST ...
- 基于STM32F030F4P9和STM32 CUBEMX 输出PWM波形
STM32F030F4P9定时器功能比较丰富,在此记录项目中使用其自动输出PWM波形(频率:50HZ).CubeMX配置定时器如下图说明. 在此定时器基础时钟为48MHZ,配置中不做分频处理,预分频系 ...
- STM32 TIM 多通道互补PWM波形输出配置快速入门
platform:stm32f10xxx lib:STM32F10x_StdPeriph_Lib_V3.5.0 前言 在做三相逆变的时候,需要软件生成SVPWM波形,具体的算法需要产生三对互补的PWM ...
- AMQ学习笔记 - 14. 实践方案:基于ZooKeeper + ActiveMQ + replicatedLevelDB的主从部署
概述 基于ZooKeeper + ActiveMQ + replicatedLevelDB,在Windows平台的主从部署方案. 主从部署可以提供数据备份.容错[1]的功能,但是不能提供负载均衡的功能 ...
随机推荐
- C#委托五(自定义事件)
事件: "在发生其他类或对象关注的事情时,类或对象可以通过事件通知他们.发送(或引发)事件的类称为"发行者",接受(或处理)事件的类称为"订户".&q ...
- https学习笔记
HTTPS协议 HTTPS可以认为是HTTP + TLS.HTTP协议大家耳熟能详了,目前大部分WEB应用和网站都是使用HTTP协议传输的.TLS是传输层加密协议,它的前身是SSL协议,最早由nets ...
- 如何构造请求处理对象链(Pipeline)
在开发中,我们经常会遇到这样一个场景:传入一个对象,经过不同的节点对这个对象做不同的操作,比如ASP.NET Core 中的pipeline,IIS中的HTTPpipeline等.在这类问题中,往往我 ...
- WPF_界面_图片/界面/文字模糊解决之道整理
原文:WPF_界面_图片/界面/文字模糊解决之道整理 版权声明:本文为博主原创文章,未经博主允许不得转载. https://blog.csdn.net/u010265681/article/detai ...
- ZOJ 3726 RMQ + 二分法
http://acm.zju.edu.cn/onlinejudge/showProblem.do?problemId=5072 区域赛真干的话题 通过率最高的一个问题 不到一半认为这OK 然后WA果 ...
- sdutoj1225--编辑距离(dp:字符串转换)
编辑距离 nid=24#time" style="padding-bottom:0px; margin:0px; padding-left:0px; padding-right:0 ...
- SyncML是一平台无关的信息同步标准协议集
SyncML (Synchronization Markup Language)是一平台无关的信息同步标准协议集.分为SyncML数据传输协议(SyncML-DS)和SyncML设备管理协议(Sync ...
- C# dotnetcore2.0结合Selenium搜索网页
using System; using OpenQA.Selenium; using OpenQA.Selenium.Chrome; namespace ConsoleApp_Selenium { c ...
- 编译时MSIL注入--实践Mono Cecil(1)
原文:编译时MSIL注入--实践Mono Cecil(1) 紧接上两篇浅谈.NET编译时注入(C#-->IL)和浅谈VS编译自定义编译任务—MSBuild Task(csproject),在第一 ...
- synchronized 专题
这几天不断添加新内容,给个大概的提纲吧,方面朋友们阅读,各部分是用分割线隔开了的: synchronized与wait()/notify() JMM与synchronized ThreadLocal与 ...