cs231n---语义分割 物体定位 物体检测 物体分割
1 语义分割
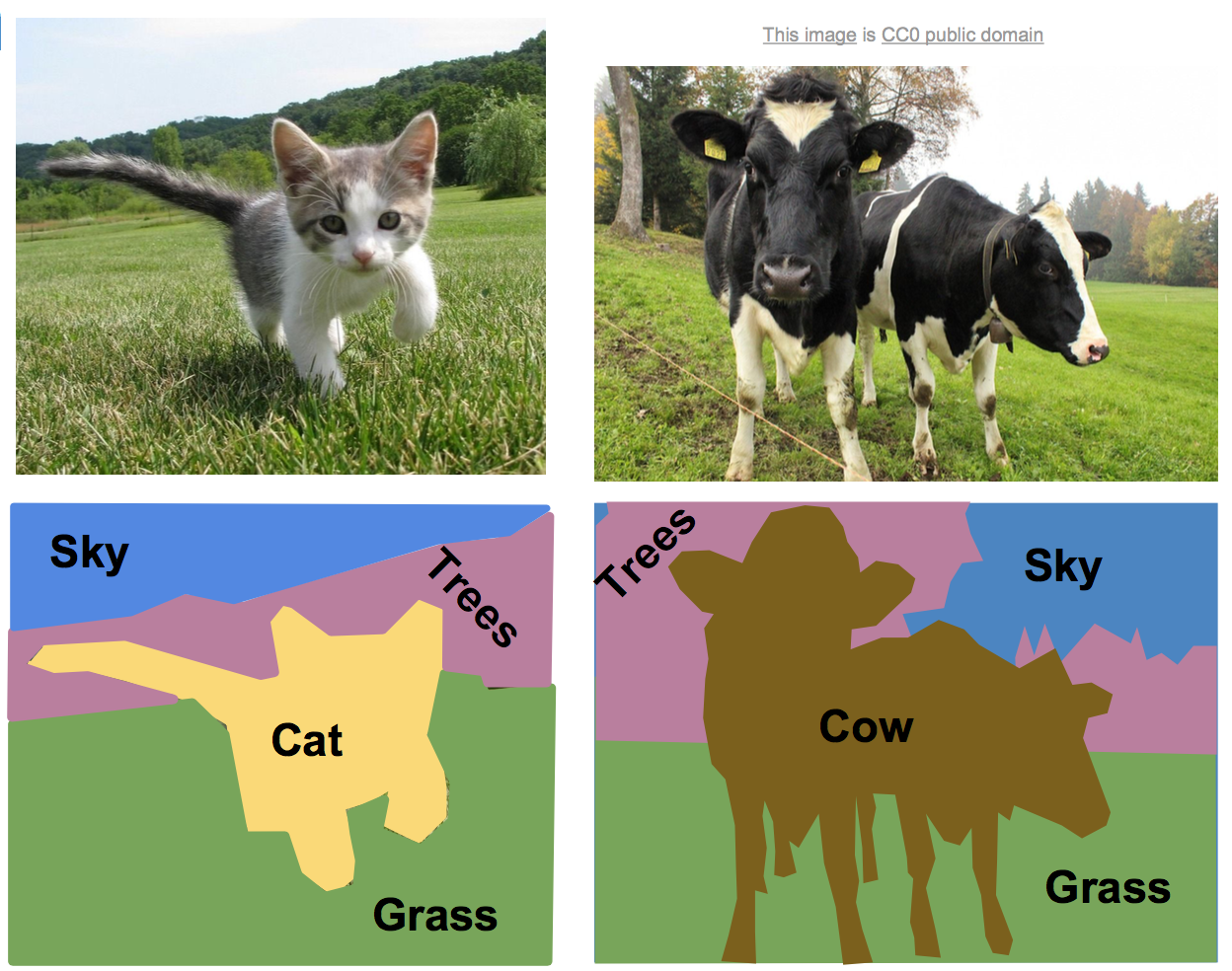
语义分割是对图像中每个像素作分类,不区分物体,只关心像素。如下:
(1)完全的卷积网络架构
处理语义分割问题可以使用下面的模型:
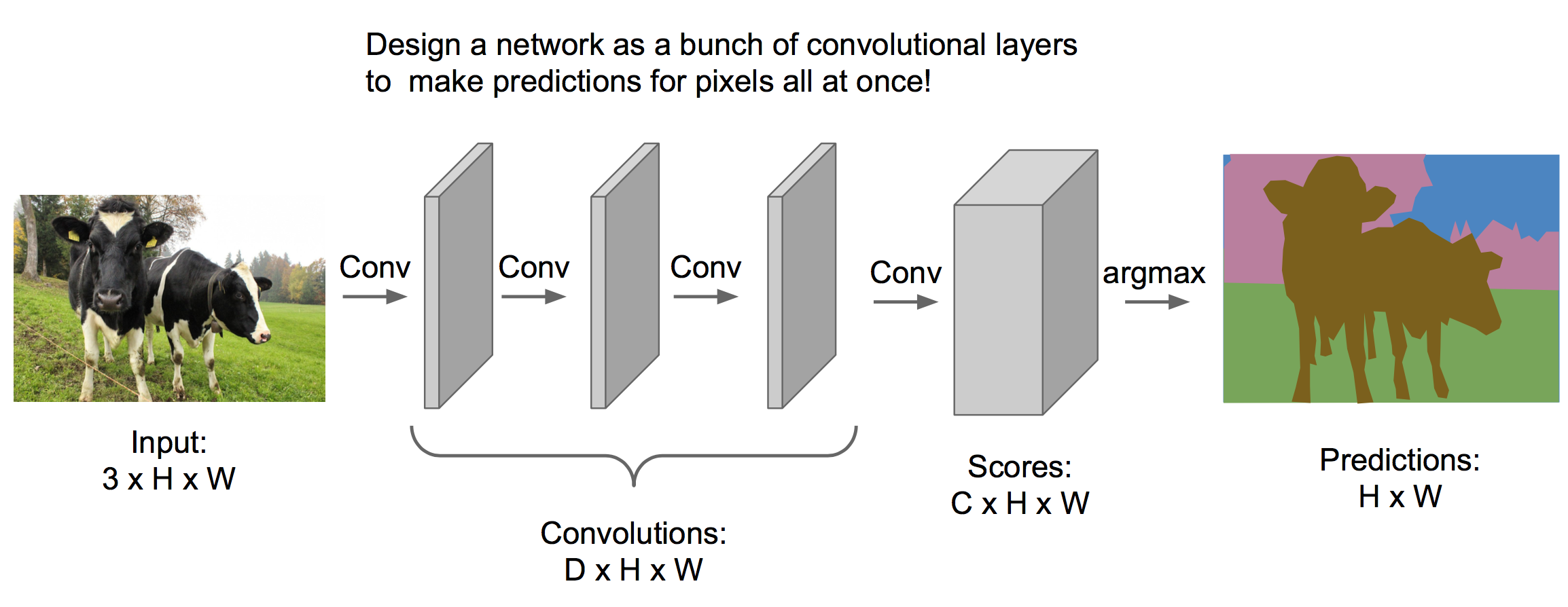
其中我们经过多个卷积层处理,最终输出体的维度是C*H*W,C表示类别个数,表示每个像素在不同类别上的得分。最终取最大得分为预测类别。
训练这样一个模型,我们需要对每个像素都分好类的训练集(通常比较昂贵)。然后前向传播出一张图的得分体(C*H*W),与训练集的标签体求交叉熵,得到损失函数,然后反向传播学习参数。
然而,这样一个模型的中间层完全保留了图像的大小,非常占内存,因此有下面改进的框架。
(2)先欠采样再过采样的框架
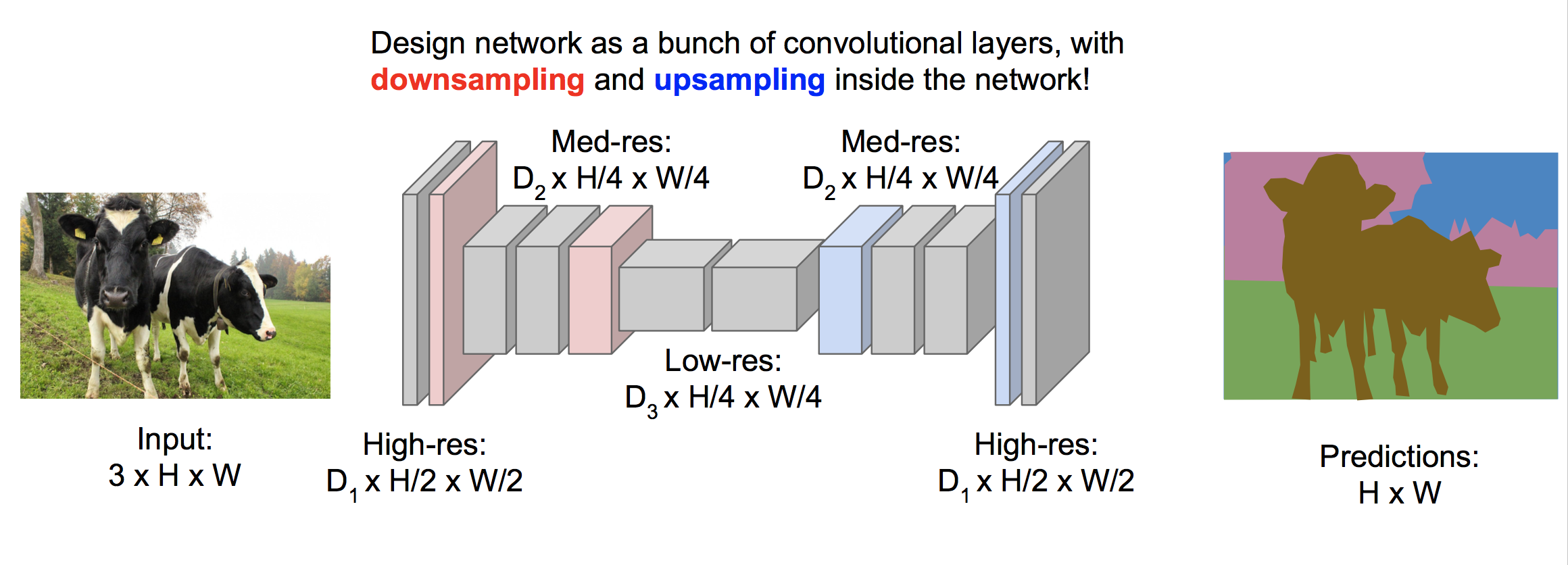
经过欠采样后可以大量节省内存,提高效率,最后再经过过采样来恢复原始图片的大小。我们知道欠采样可以使用卷积层和池化,下面介绍过采样的几种方式。
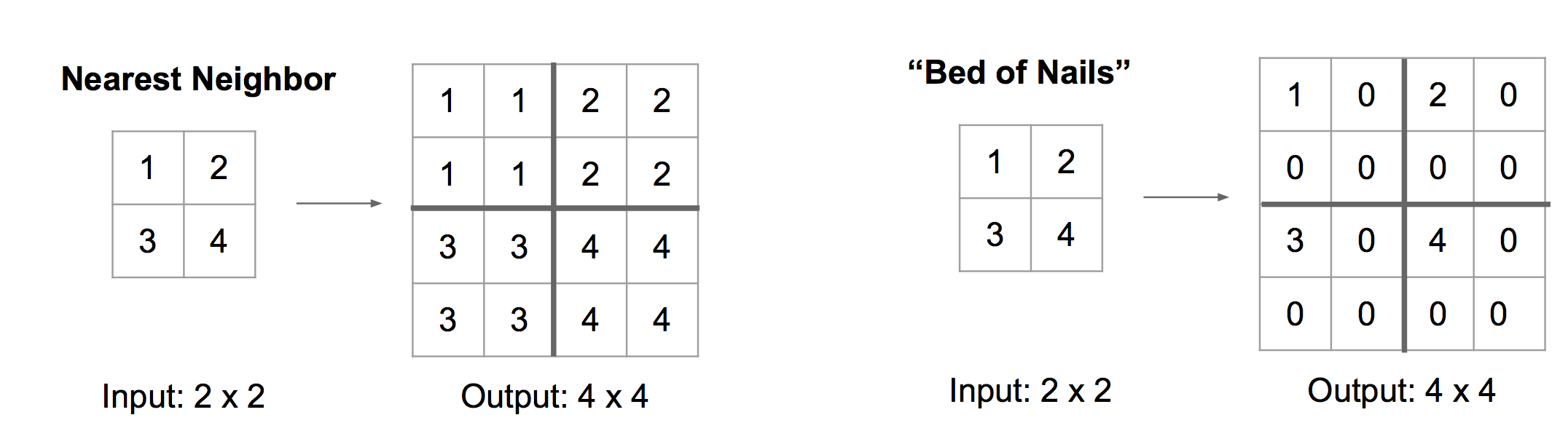
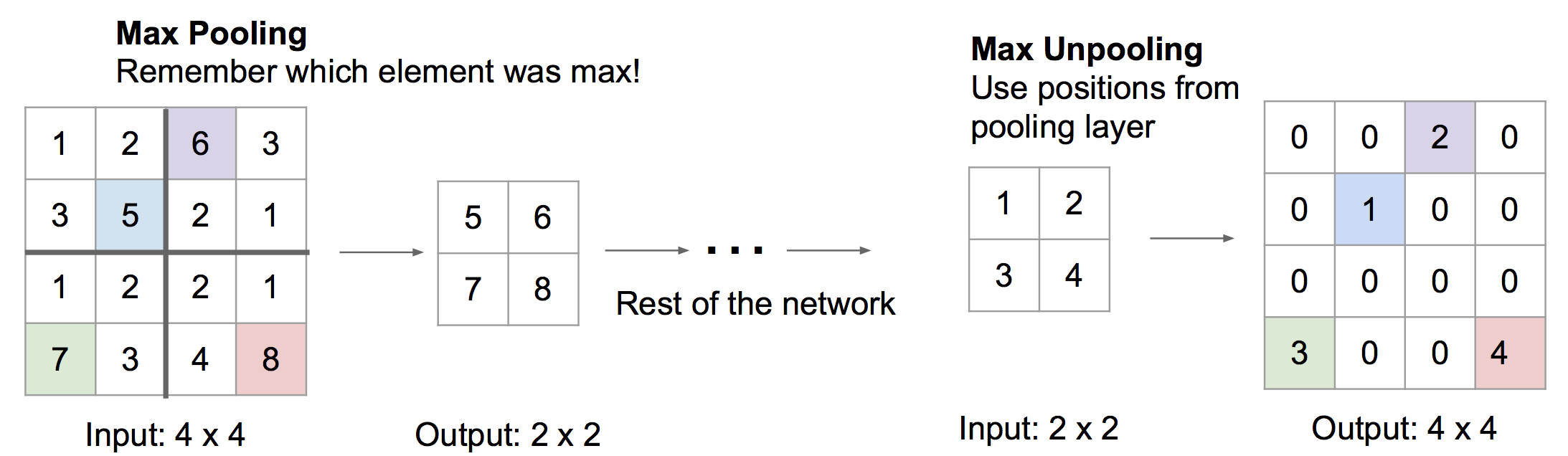
去池化 Unpooling
去池化有Nearest Neighbor,Bed of Nails等方法:
还有一种被称为Max Unpooling 的方法,该方法记录下之前使用max pooling前各个最大值在数组中的索引,去池化的时候把值放到索引处,其他位置补0:
转置卷积 Transpose Convolution
不同于去池化,转置卷积法是一种可学习的过采样方法。具体步骤是,将输入的每个值作为权重,对滤波器进行加权,然后各个加权的滤波器按照步长拼成输出,重叠部分相加。如下:
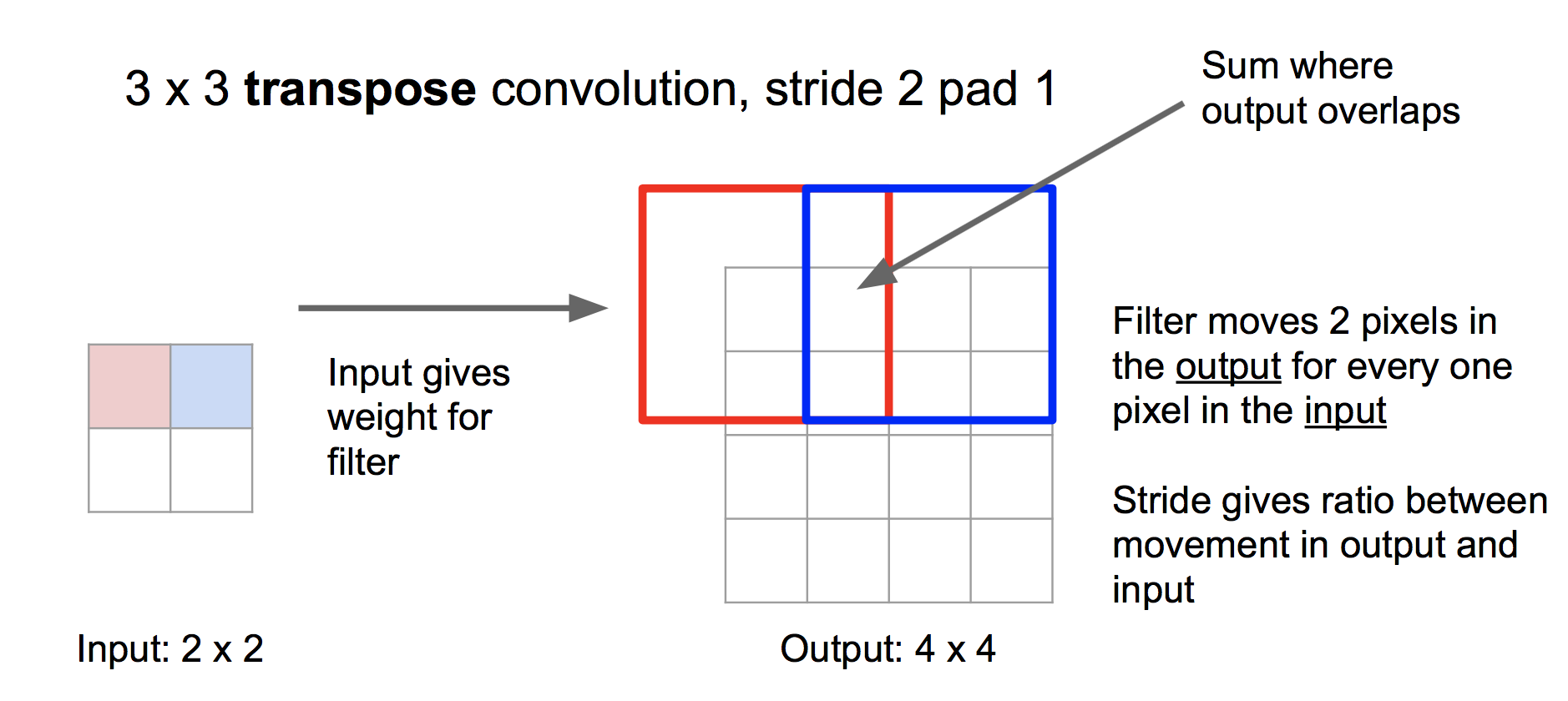
我们可以通过学习滤波器,来学习网络应该如何做过采样。
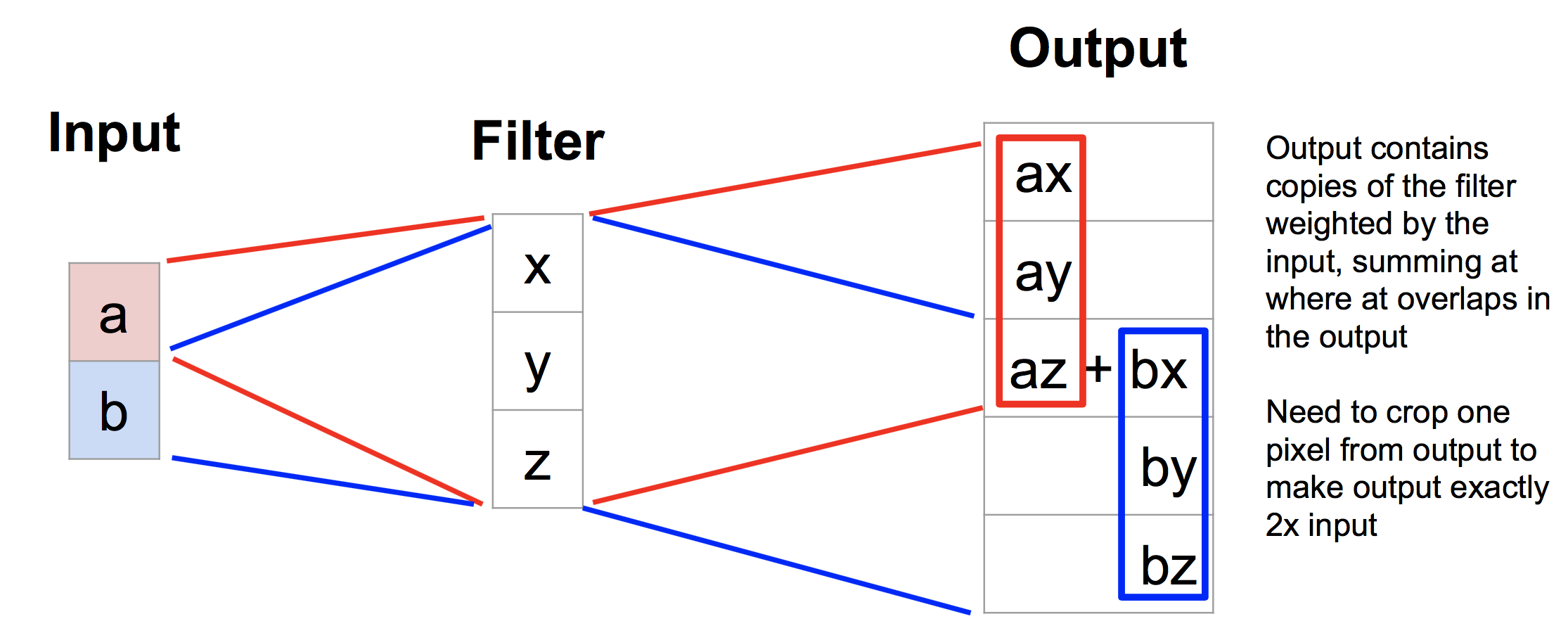
理解转置卷积的一个一维的例子是:
在一些论文里,转置卷积还有一些其他名字,看到的时候要知道:
另外,转置卷积之所以被称为转置卷积,是因为它的矩阵形式。传统的卷积写成矩阵形式如下(注意这里是一维的例子):
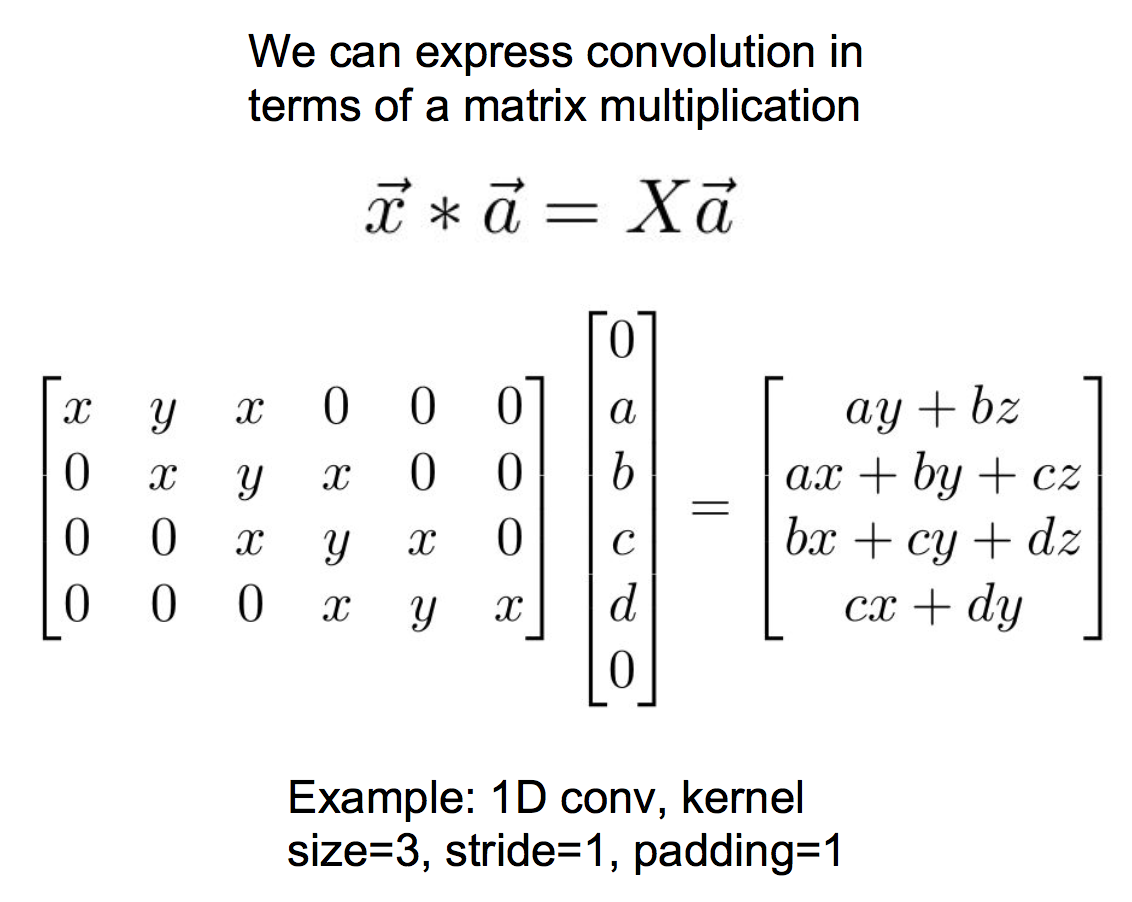
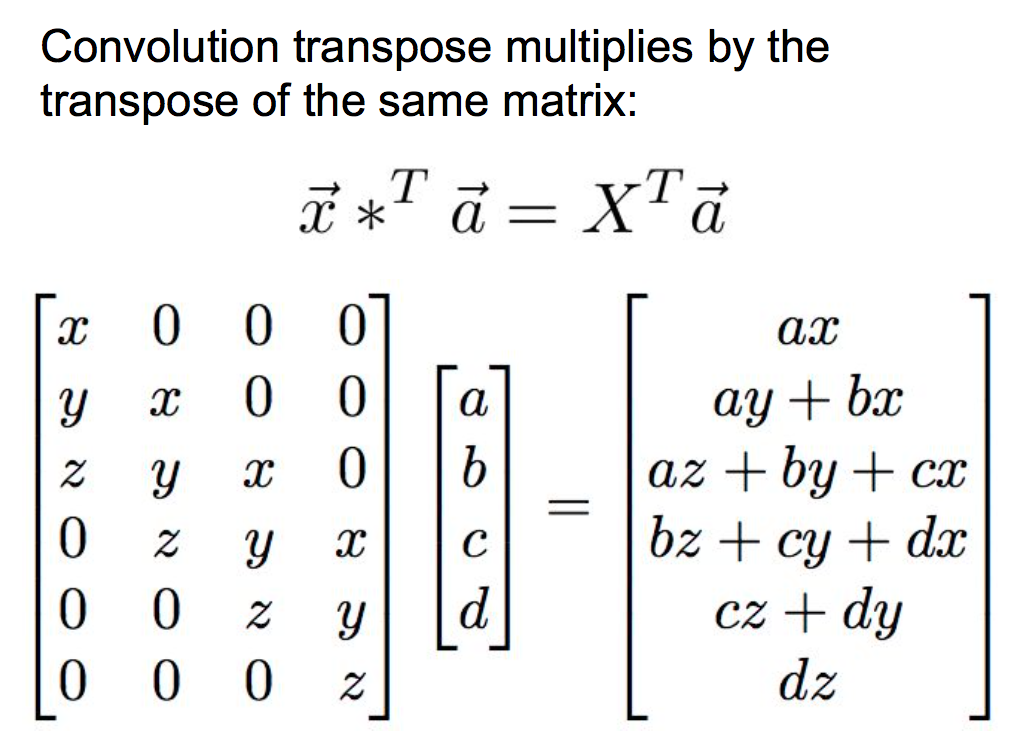
其中x是滤波器,a是输入。而转置卷积写成矩阵形式如下:
2 分类+定位
分类+定位的任务要求我们在给图片打标签之后,还要框出物体在什么地方(注意与物体检测的区别,在分类定位中,输出的框的个数是事先已知的,而物体检测中则是不确定的)。如下:
此类任务常用的处理框架如下:
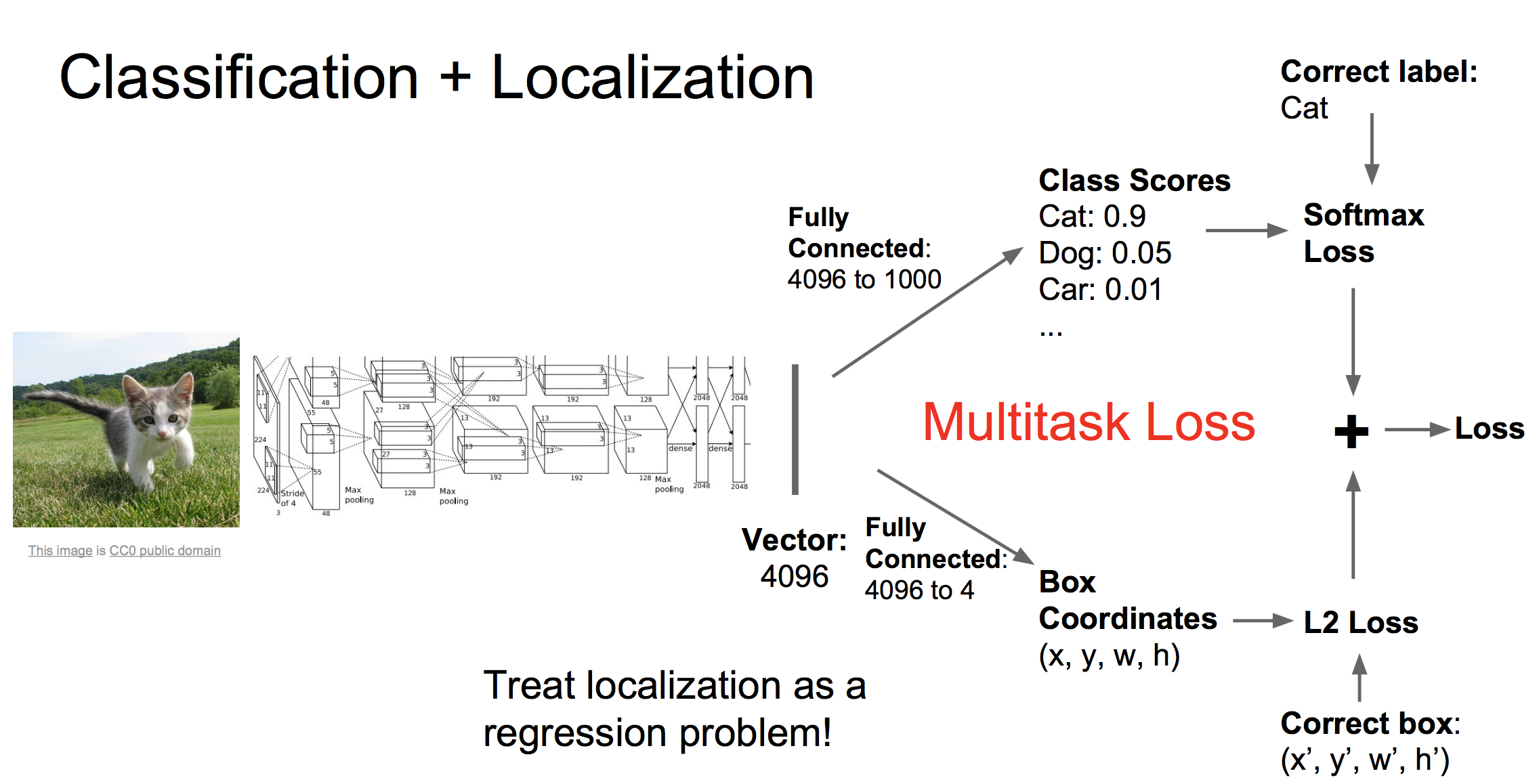
首先我们还是用CNN得到描述图片的特征向量,然后我们接入两个全连接网络,一个网络负责生成最后的类别评分,另一个负责生成红框四个点的坐标值。因此对应两个损失,softmax损失和回归损失。我们将这两个损失加权相加得到总的损失(加权值是超参数),然后进行反向传播学习。
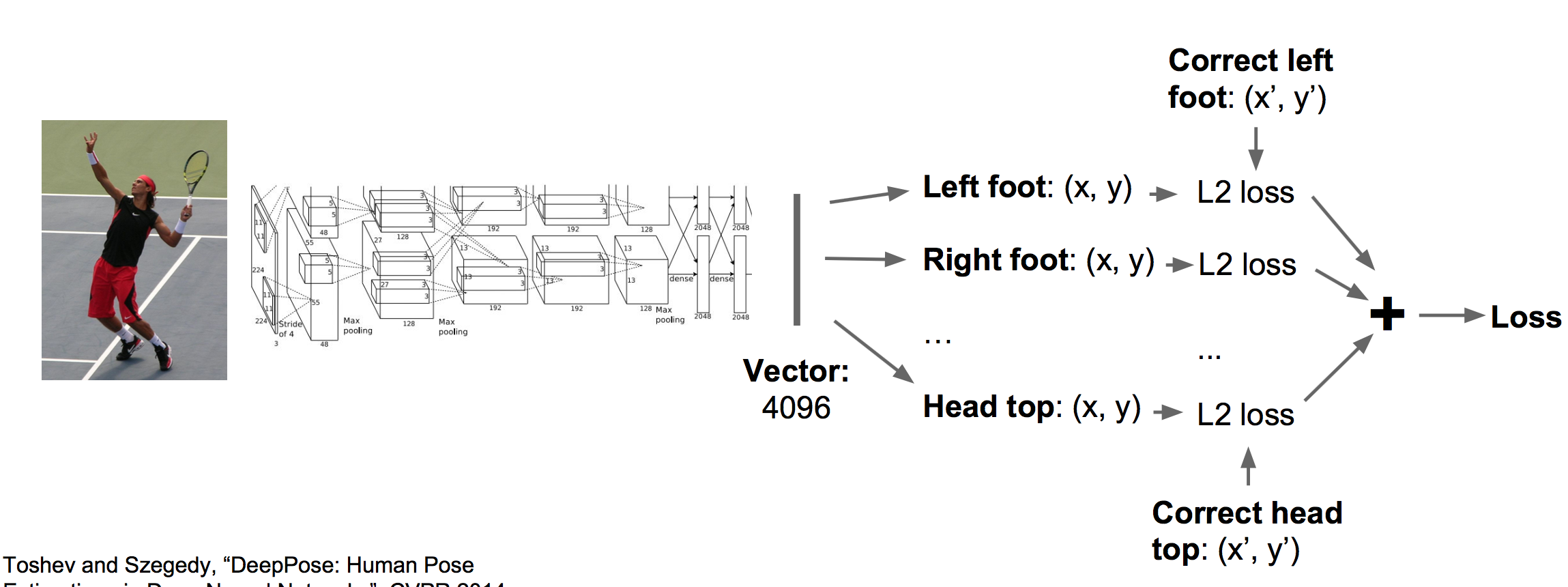
这里应用回归的思路同样可以应用于姿态估计,我们用十四个点来确定一个人的姿态情况:
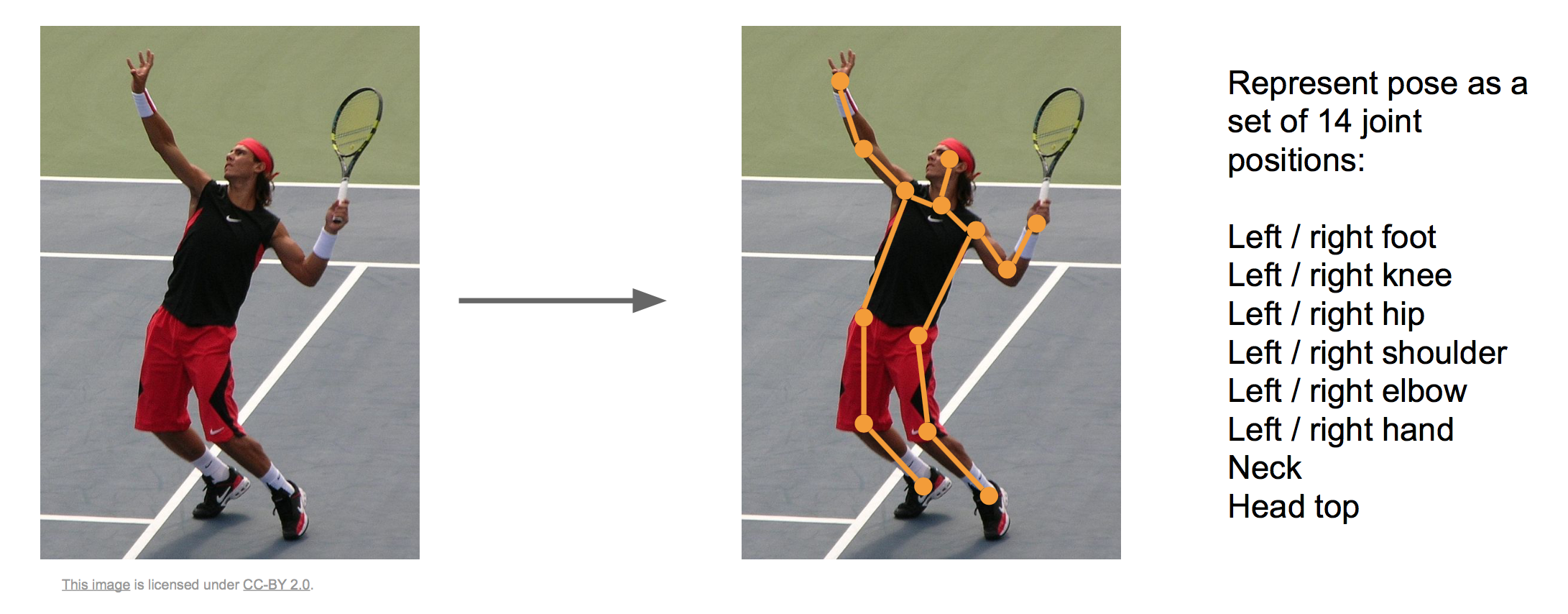
应用同样的框架(CNN+回归全连接网络)可以训练这个任务:
3 物体检测
与分类+定位任务不同的是,物体检测中需要检测的物体数量是不确定的,因此无法直接使用上面的回归框架。下面简单介绍几个框架。
(1)滑动窗口
滑动窗口的思想是随机选取若干个不同大小不同位置的窗口,对它们应用CNN进行分类。缺点是窗口数量很大,计算代价很高。
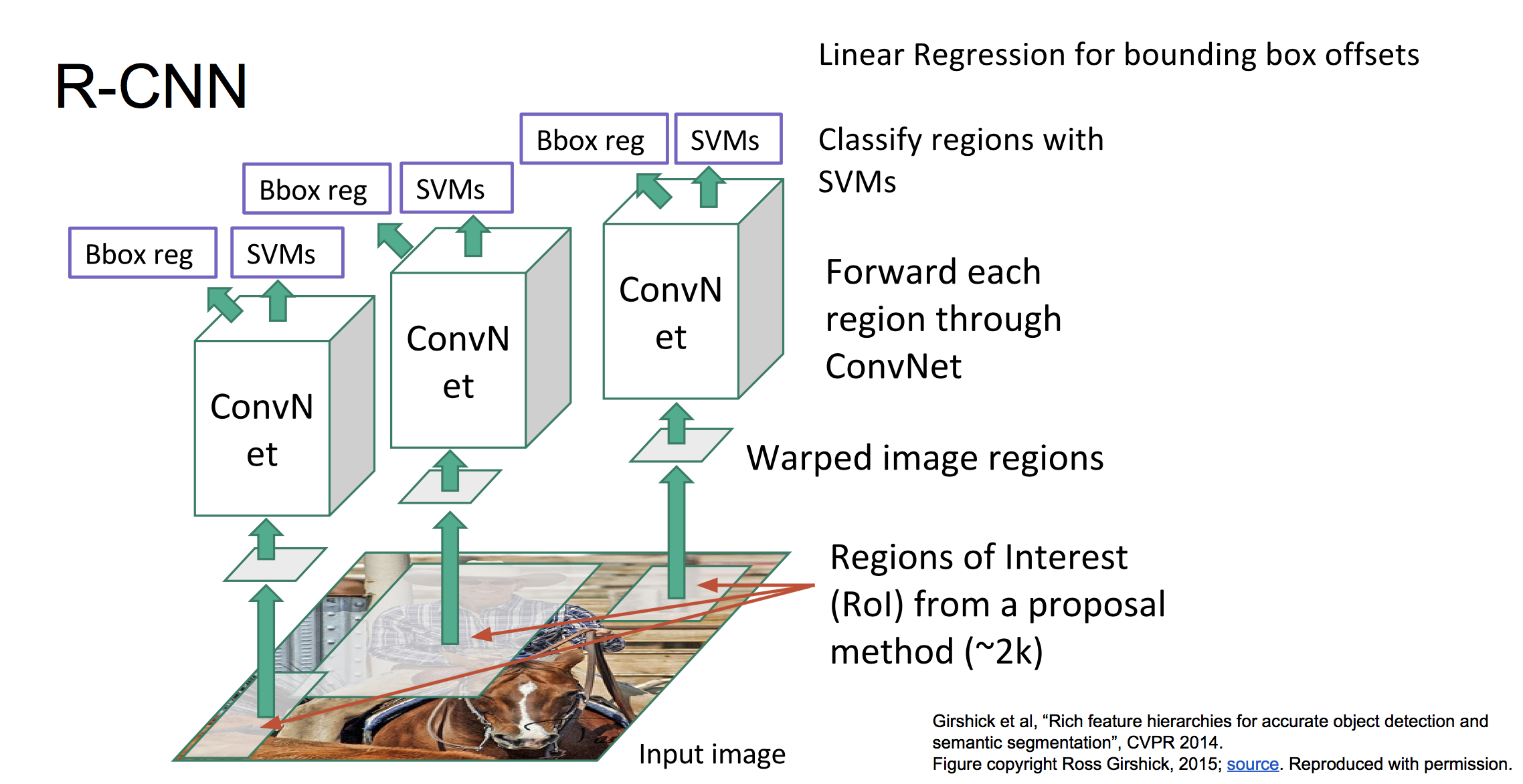
(2)RCNN
训练阶段:
a 使用IMAGENet的数据预训练一个CNN
b 构造训练集:首先应用Selective Search算法从每张带标定框的图像中选取2000~3000个候选框。对每个候选框来说,找到与它重叠面积最大的标定框,如果重叠比例大于阈值(0.5),则将该候选框标签设为该标定框的标签,若重叠比例小于阈值(0.5),则标签设为“背景”。同时对于重叠比例大于一定阈值(0.6)的候选框,还要计算出其与标定框的偏移距离。
c 每个候选区域经过预处理,送到CNN中提取出图像特征,然后把图像特征送到SVM分类器中,计算出标签分类的损失。同时图像特征还要送到回归器中,计算偏移距离的L2损失。
d 反向传播训练SVM,回归器,CNN
整体框架图如下:
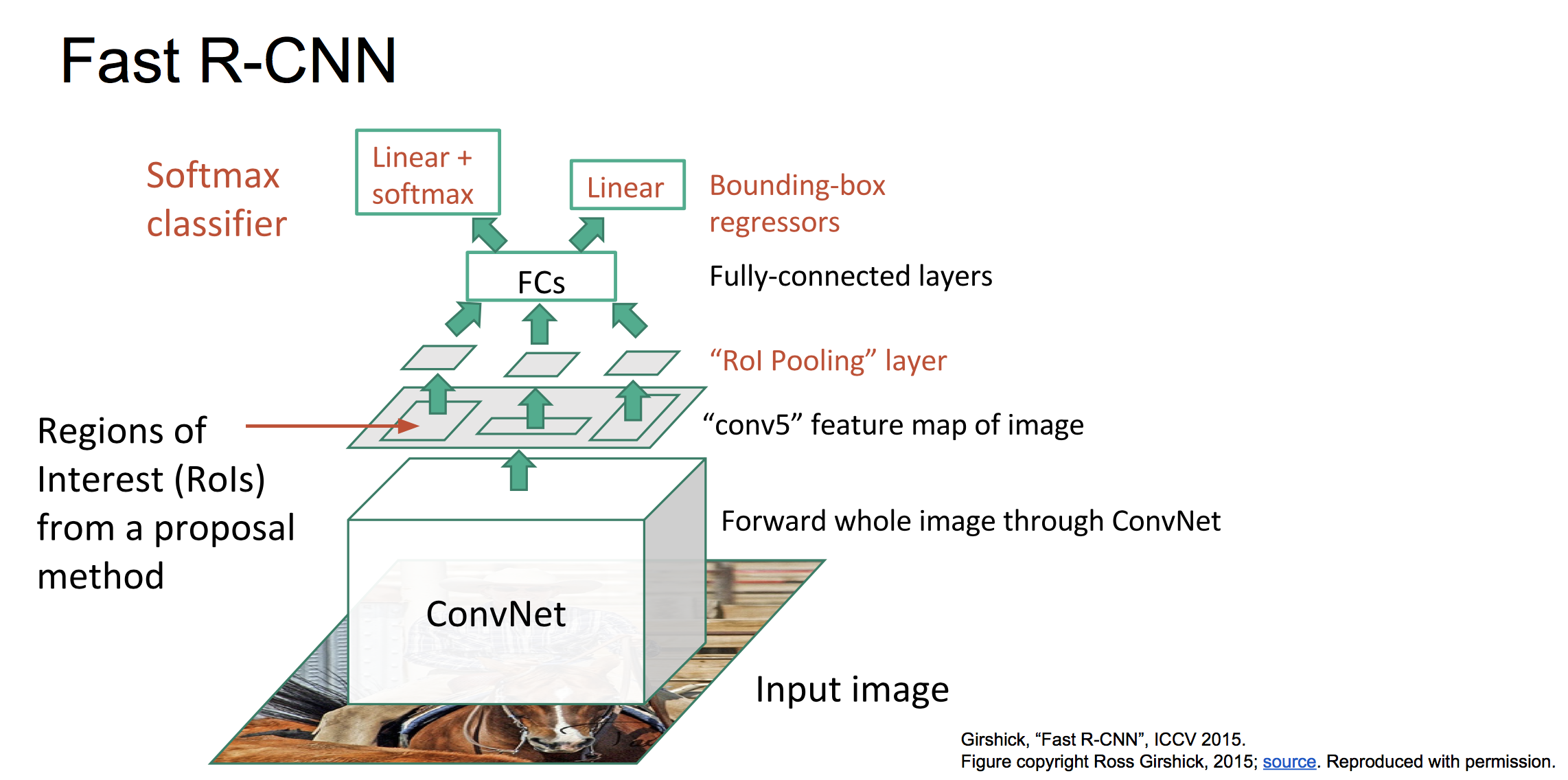
(3)Fast RCNN
RCNN训练和预测速度很慢,主要是由于不同候选框之间的重叠部分特征重复用CNN提取导致的。因此可以采取先对整个图像进行CNN特征提取,然后在选定候选区域,并从总的featuremap中找到每个候选区域对应的特征。框架如下:
(4)Faster RCNN
Fast RCNN的性能瓶颈是SS算法选定候选区域,在Faster RCNN中,使用网络Region Proposal Network (RPN) 来预测候选区域,整体框架如下:
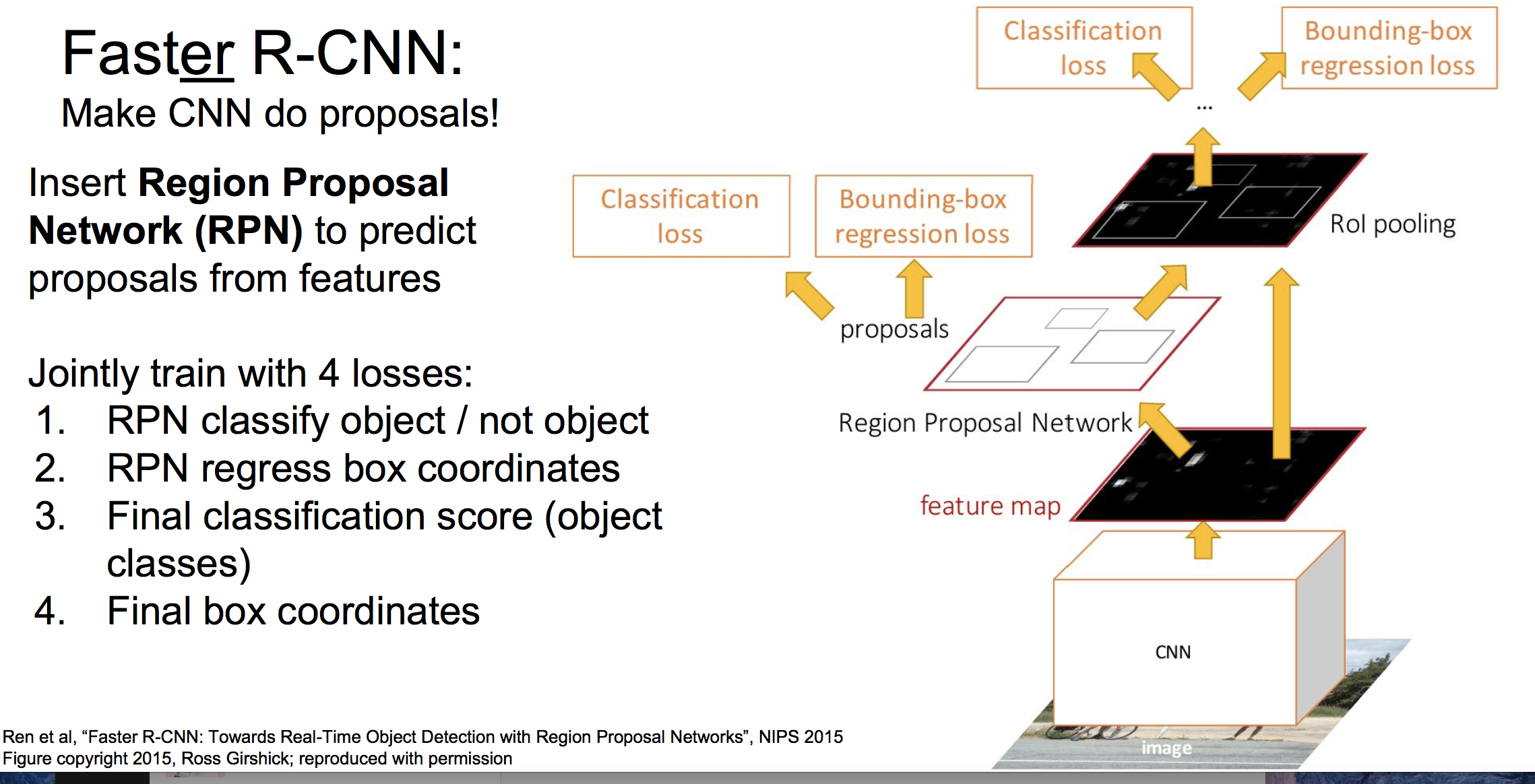
Faster RCNN是当前很先进的目标检测框架,要了解细节看这篇论文:
Ren, Shaoqing, et al. “Faster R-CNN: Towards real-time object detection with region proposal networks.” Advances in Neural Information Processing Systems. 2015.
(5)SSD
SSD的思想是将图像划分为很多个格子,以每个格子的中心可以衍生出若干个base boxes。使用神经网络一次性的对这些格子进行分类,对这些baseboxes进行回归。
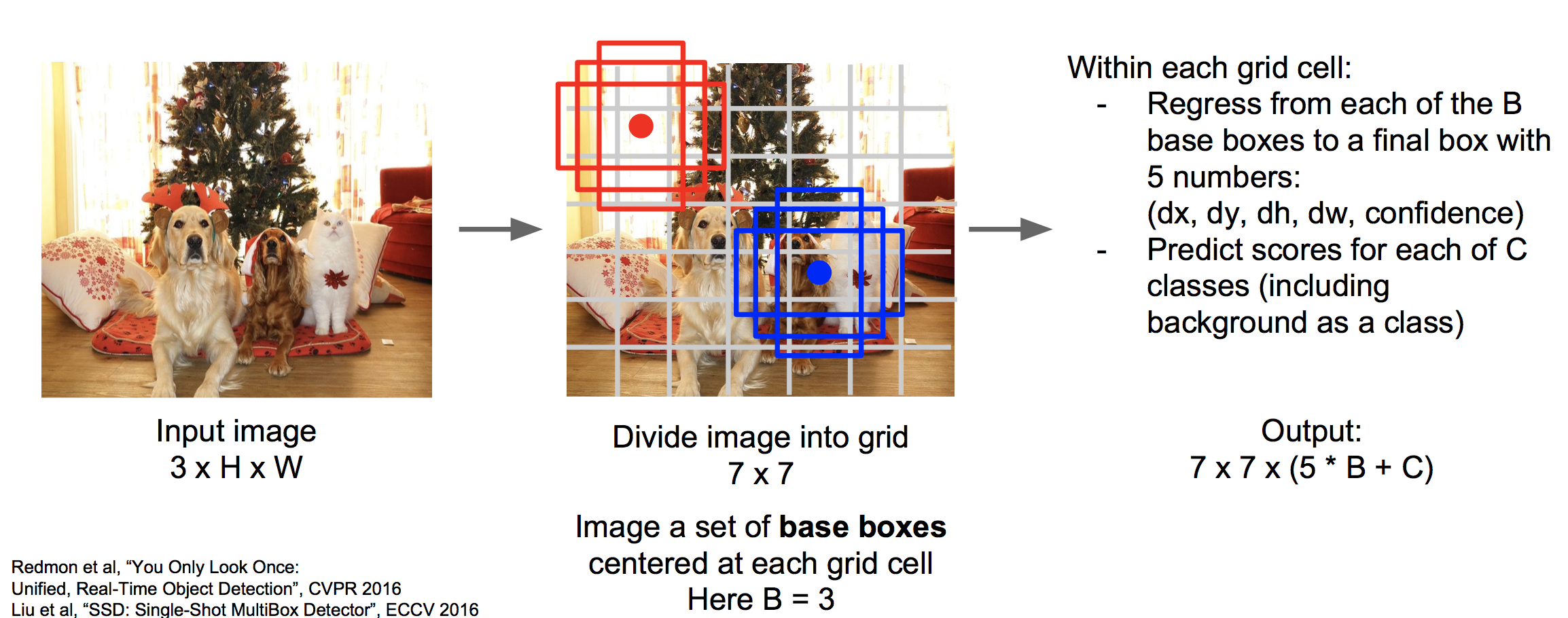
上图中,一个图像划分为7*7个grid,每个grid有3个base boxes。我们需要用回归为每个base boxes预测五个值,为每个格子进行分类打分。直接使用一个的CNN神经网络输出7*7*(5*B+C)的大小即可。
更多细节参看论文:Liu et al, “SSD: Single-Shot MultiBox Detector”, ECCV 2016
(6)各种物体检测框架的对比
有很多变量可控:
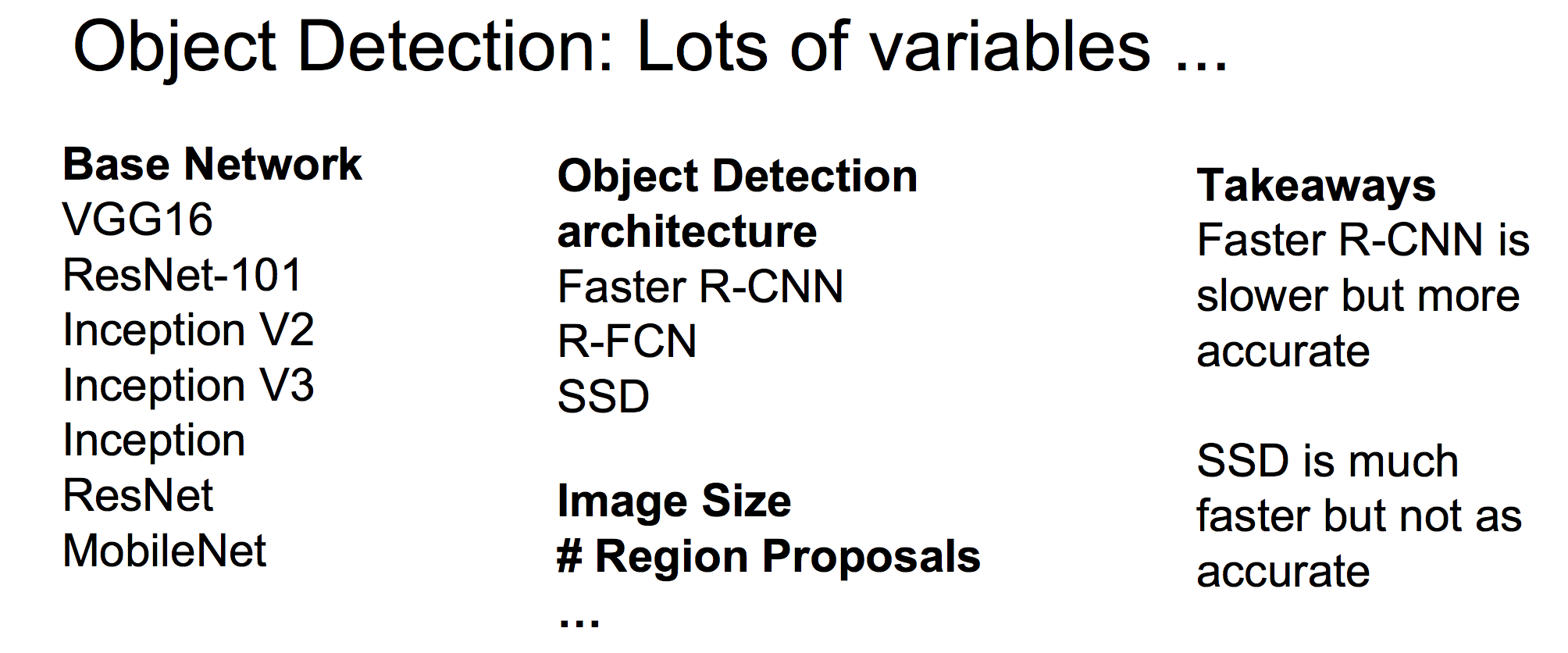
这篇论文对比了各种框架:
Huang et al, “Speed/accuracy trade-offs for modern convolutional object detectors”, CVPR 2017
FasterCNN比SSD具有更高的精度,但是没有SSD快。
(7)Dense Captioning
Dense Captioning 是对图片中的每个事物做检测,并用语言进行描述:
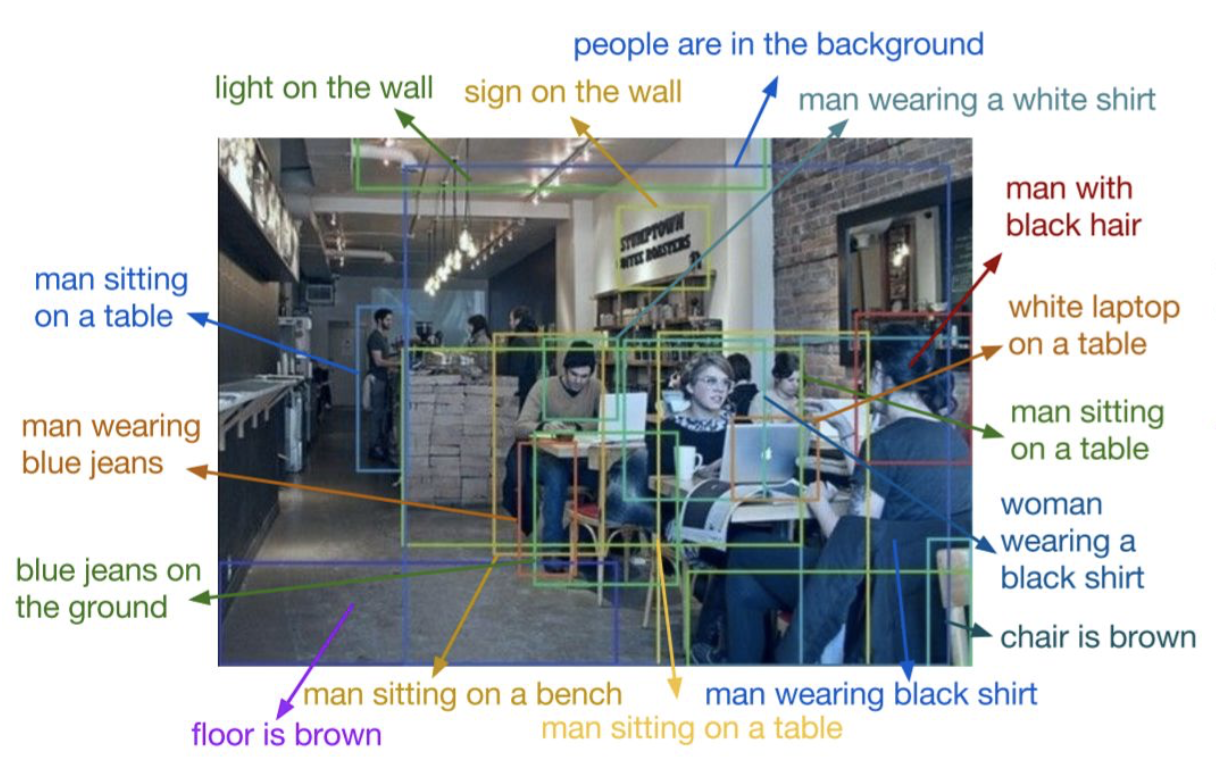
Dense Captioning其实就是Object Detection + Captioning ,其框架可以使用faster RCNN结合LSTM来做。具体参考文献:
Johnson, Karpathy, and Fei-Fei, “DenseCap: Fully Convolutional Localization Networks for Dense Captioning”, CVPR 2016
4 物体分割
物体分割要做的是在物体检测上更进一步,从像素层面把各个物体分割出来。
Mask RCNN是当前很前沿的一种方法,其将faster RCNN和语义分割结合成一个框架,具有非常好的效果!框架为:
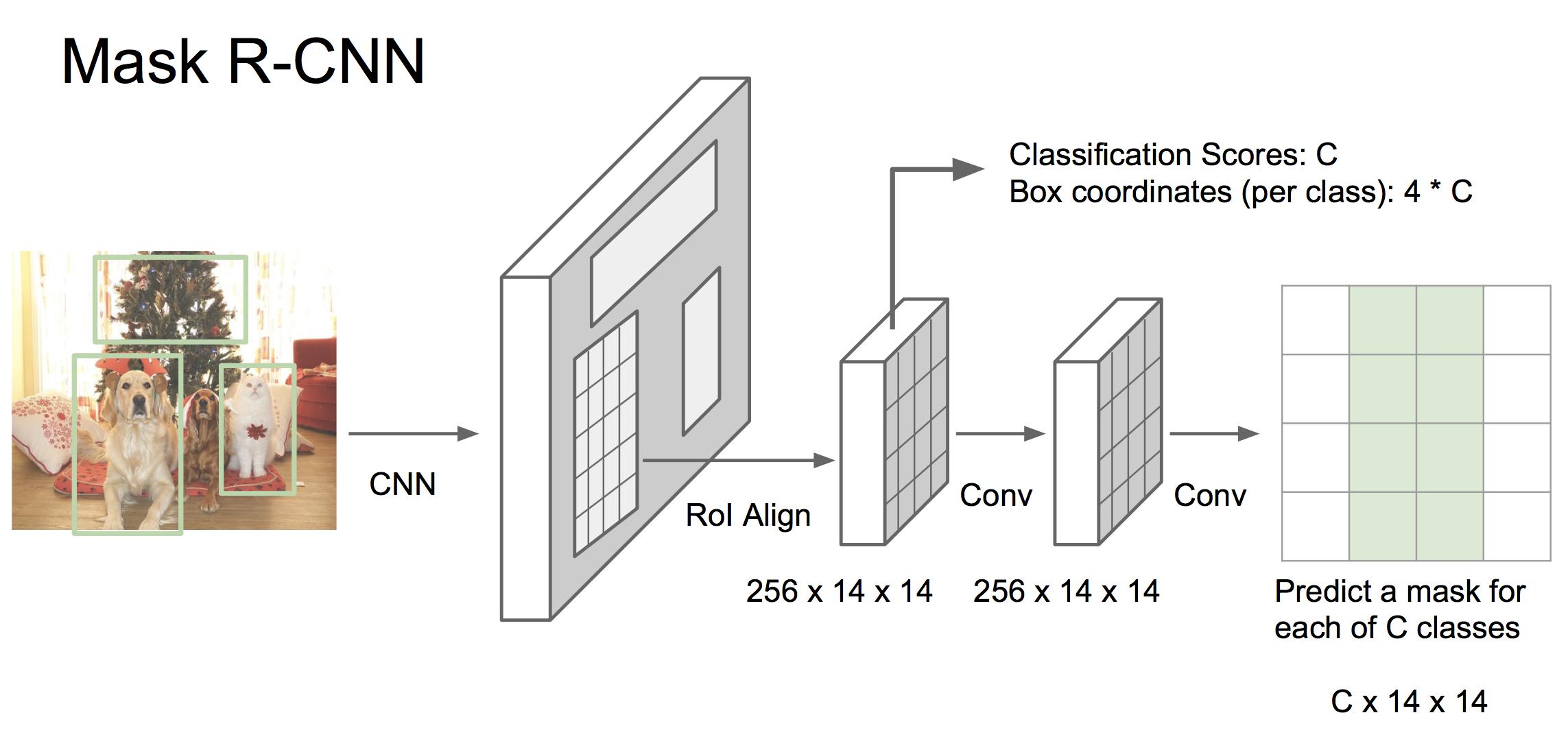
如上图,首先将图像使用CNN处理为特征,然后经过一个RPN网络生成候选区域,投射到之前的feature map。到这里与faster RCNN一样。之后有两个分支,一个分支与faster RCNN相同,预测候选框的分类和边界值,另一个分支则与语义分割相似,为每个像素做分类。
mask RCNN具有超级好的效果,有机会一定要拜读一下。

He et al, “Mask R-CNN”, arXiv 2017
5 总结
这些成功的计算机视觉框架和模型给我们的启示是,将具有基本功能的模块整合成一个可训练的端到端系统,可以完成更加复杂的功能。通过向网络中引入多个损失函数的分支,可以让其完成多目标的联合优化。
cs231n---语义分割 物体定位 物体检测 物体分割的更多相关文章
- Tensorflow实现Mask R-CNN实例分割通用框架,检测,分割和特征点定位一次搞定(多图)
Mask R-CNN实例分割通用框架,检测,分割和特征点定位一次搞定(多图) 导语:Mask R-CNN是Faster R-CNN的扩展形式,能够有效地检测图像中的目标,同时还能为每个实例生成一个 ...
- R-CNN论文翻译——用于精确物体定位和语义分割的丰富特征层次结构
原文地址 我对深度学习应用于物体检测的开山之作R-CNN的论文进行了主要部分的翻译工作,R-CNN通过引入CNN让物体检测的性能水平上升了一个档次,但该文的想法比较自然原始,估计作者在写作的过程中已经 ...
- R-FCN:基于区域的全卷积网络来检测物体
http://blog.csdn.net/shadow_guo/article/details/51767036 原文标题为“R-FCN: Object Detection via Region-ba ...
- OpenCV 使用光流法检测物体运动
OpenCV 可以使用光流法检测物体运动,贴上代码以及效果. // opticalflow.cpp : 定义控制台应用程序的入口点. // #include "stdafx.h" ...
- python+opencv实现检测物体聚集区域
内容涉及:二值图像转换 / 检测连通区域面积 / 在原图上画框等 import cv2 import numpy as np for n in open('list.txt'): # list.txt ...
- Unity 检测物体是否在相机视野范围内
需求: 类似NPC血条,当NPC处于摄像机视野内,血条绘制,且一直保持在NPC头顶. 开始: 网上查找资料,然后编写代码: public RectTransform rectBloodPos; voi ...
- js 运动函数篇 (一) (匀速运动、缓冲运动、多物体运动、多物体不同值运动、多物体多值运动)层层深入
前言: 本人纯小白一个,有很多地方理解的没有各位大牛那么透彻,如有错误,请各位大牛指出斧正!小弟感激不尽. 本篇文章为您分析一下原生JS写 匀速运动.缓冲运动.多物体运 ...
- segMatch:基于3D点云分割的回环检测
该论文的地址是:https://arxiv.org/pdf/1609.07720.pdf segmatch是一个提供车辆的回环检测的技术,使用提取和匹配分割的三维激光点云技术.分割的例子可以在下面的图 ...
- OverFeat:基于卷积网络的集成识别、定位与检测
摘要:我们提出了一个使用卷积网络进行分类.定位和检测的集成框架.我们展示了如何在ConvNet中有效地实现多尺度和滑动窗口方法.我们还介绍了一种新的深度学习方法,通过学习预测对象边界来定位.然后通过边 ...
- Mask R-CNN用于目标检测和分割代码实现
Mask R-CNN用于目标检测和分割代码实现 Mask R-CNN for object detection and instance segmentation on Keras and Tenso ...
随机推荐
- 在vue项目中遇到关于对象的深浅拷贝问题
一.问题 项目里新添加了一个多选的功能,其显示的数据都是从后端返回过来的,我们需要在返回来的数据外再额外添加一个是否选中的标记,我的选择是在返回正确的数据时将标记添加进去,然后push到数组中.然后就 ...
- python数据库-mongoDB的高级查询操作(55)
一.MongoDB索引 为什么使用索引? 假设有一本书,你想看第六章第六节讲的是什么,你会怎么做,一般人肯定去看目录,找到这一节对应的页数,然后翻到这一页.这就是目录索引,帮助读者快速找到想要的章节. ...
- 工作经验之石氏thinking
经常听到N多人说工作经验这个名词:也时常听到人说工作多少年就是多少年工作经验.我听着总觉得有点别扭,感觉他们把这个名词说的太简单了,而且觉得不是工作N年就一定有所谓的工作经验.我觉得归根结底还是在于工 ...
- Java开发实例大全:3月14日练习
import java.io.FileNotFoundException; import java.io.PrintStream; import java.math.BigDecimal; impor ...
- 微信小程序 textarea 层级过高的解决方式
建立一个新的textarea 组件代替原生textarea ,废话不多说,上代码 <template> <view class="ui-textarea"> ...
- [PTA] 1001. 害死人不偿命的(3n+1)猜想 (Basic)
import java.util.*; public class Main { public static void main(String[] args) { Scanner sc = new Sc ...
- Linux系统安装jdk——.tar.gz版
1.rpm.deb.tar.gz的区别: rpm格式的软件包适用于基于Red Hat发行版的系统,例如Red Hat Linux.SUSE.Fedora. deb格式的软件包则是适用于基于Debian ...
- IO-Java实现文件的复制
public class FileCopy { public static void main(String[] args) throws IOException { // 1.创建一个字节输入流对象 ...
- PHP与ECMAScript_3_常用字符串函数
PHP ECMAScript 长度 strlen($str) str.length 查找类 $str[n] ...
- 史上最强Java开发环境搭建
在项目产品开发中,开发环境搭建是软件开发的首要阶段,也是必须阶段,只有开发环境搭建好了,方可进行开发,良好的开发环境搭建,为后续的开发工作带来极大便利. 对于大公司来说,软件开发环境搭建工作一般是由运 ...