【原创】Linux中断子系统(三)-softirq和tasklet
背景
Read the fucking source code!--By 鲁迅A picture is worth a thousand words.--By 高尔基
说明:
- Kernel版本:4.14
- ARM64处理器,Contex-A53,双核
- 使用工具:Source Insight 3.5, Visio
1. 概述
中断子系统中有一个重要的设计机制,那就是Top-half和Bottom-half,将紧急的工作放置在Top-half中来处理,而将耗时的工作放置在Bottom-half中来处理,这样确保Top-half能尽快完成处理,那么为什么需要这么设计呢?看一张图就明白了:

- ARM处理器在进行中断处理时,处理器进行异常模式切换,此时会将中断进行关闭,处理完成后再将中断打开;
- 如果中断不分上下半部处理,那么意味着只有等上一个中断完成处理后才会打开中断,下一个中断才能得到响应。当某个中断处理处理时间较长时,很有可能就会造成其他中断丢失而无法响应,这个显然是难以接受的,比如典型的时钟中断,作为系统的脉搏,它的响应就需要得到保障;
- 中断分成上下半部处理可以提高中断的响应能力,在上半部处理完成后便将中断打开(通常上半部处理越快越好),这样就可以响应其他中断了,等到中断退出的时候再进行下半部的处理;
- 中断的
Bottom-half机制,包括了softirq、tasklet、workqueue、以及前文中提到过的中断线程化处理等,其中tasklet又是基于softirq来实现的,这也是本文讨论的主题;
在中断处理过程中,离不开各种上下文的讨论,了解不同上下文的区分有助于中断处理的理解,所以,还是来一张老图吧:
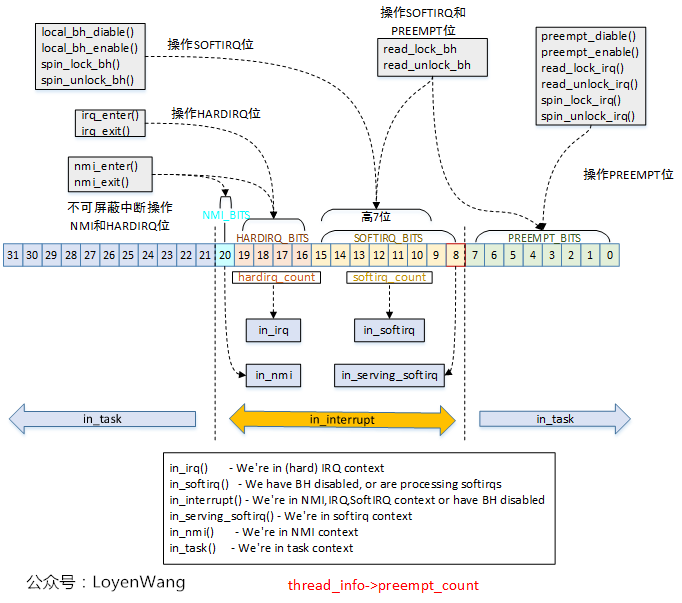
task_struct结构体中的thread_info.preempt_count用于记录当前任务所处的context状态;PREEMPT_BITS:用于记录禁止抢占的次数,禁止抢占一次该值就加1,使能抢占该值就减1;SOFTIRQ_BITS:用于同步处理,关掉下半部的时候加1,打开下半部的时候减1;HARDIRQ_BITS:用于表示处于硬件中断上下文中;
前戏结束了,直奔主题吧。
2. softirq
2.1 初始化
softirq不支持动态分配,Linux kernel提供了静态分配,关键的结构体描述如下,可以类比硬件中断来理解:
/* 支持的软中断类型,可以认为是软中断号, 其中从上到下优先级递减 */
enum
{
HI_SOFTIRQ=0, /* 最高优先级软中断 */
TIMER_SOFTIRQ, /* Timer定时器软中断 */
NET_TX_SOFTIRQ, /* 发送网络数据包软中断 */
NET_RX_SOFTIRQ, /* 接收网络数据包软中断 */
BLOCK_SOFTIRQ, /* 块设备软中断 */
IRQ_POLL_SOFTIRQ, /* 块设备软中断 */
TASKLET_SOFTIRQ, /* tasklet软中断 */
SCHED_SOFTIRQ, /* 进程调度及负载均衡的软中断 */
HRTIMER_SOFTIRQ, /* Unused, but kept as tools rely on thenumbering. Sigh! */
RCU_SOFTIRQ, /* Preferable RCU should always be the last softirq, RCU相关的软中断 */
NR_SOFTIRQS
};
/* 软件中断描述符,只包含一个handler函数指针 */
struct softirq_action {
void (*action)(struct softirq_action *);
};
/* 软中断描述符表,实际上就是一个全局的数组 */
static struct softirq_action softirq_vec[NR_SOFTIRQS] __cacheline_aligned_in_smp;
/* CPU软中断状态描述,当某个软中断触发时,__softirq_pending会置位对应的bit */
typedef struct {
unsigned int __softirq_pending;
unsigned int ipi_irqs[NR_IPI];
} ____cacheline_aligned irq_cpustat_t;
/* 每个CPU都会维护一个状态信息结构 */
irq_cpustat_t irq_stat[NR_CPUS] ____cacheline_aligned;
/* 内核为每个CPU都创建了一个软中断处理内核线程 */
DEFINE_PER_CPU(struct task_struct *, ksoftirqd);
来一张图吧:

softirq_vec[]数组,类比硬件中断描述符表irq_desc[],通过软中断号可以找到对应的handler进行处理,比如图中的tasklet_action就是一个实际的handler函数;- 软中断可以在不同的CPU上并行运行,在同一个CPU上只能串行执行;
- 每个CPU维护
irq_cpustat_t状态结构,当某个软中断需要进行处理时,会将该结构体中的__softirq_pending字段或上1UL << XXX_SOFTIRQ;
2.2 流程分析
2.2.1 软中断注册
中断处理流程中设备驱动通过request_irq/request_threaded_irq接口来注册中断处理函数,而在软中断处理流程中,通过open_softirq接口来注册,由于它实在是太简单了,我忍不住想把代码贴上来:
void open_softirq(int nr, void (*action)(struct softirq_action *))
{
softirq_vec[nr].action = action;
}
也就是将软中断描述符表中对应描述符的handler函数指针指向对应的函数即可,以便软中断到来时进行回调。
那么,问题来了,什么时候进行软中断函数回调呢?
2.2.2 软中断执行之一:中断处理后
先看第一种情况,用图片来回答问题:
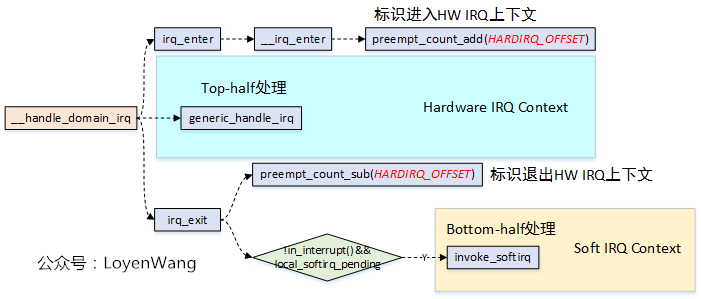
- Linux中断子系统(二)-通用框架处理文章中讲述了整个中断处理流程,在接收到中断信号后,处理器进行异常模式切换,并跳转到异常向量表处进行执行,关键的流程为:
el0_irq->irq_handler->handle_arch_irq(gic->handle_irq)->handle_domain_irq->__handle_domain_irq; - 在
__handle_domain_irq函数中,irq_enter和irq_exit分别用于来标识进入和离开硬件中断上下文处理,这个从preempt_count_add/preempt_count_sub来操作HARDIRQ_OFFSET可以看出来,这也对应到了上文中的Context描述图; - 在离开硬件中断上下文后,如果
!in_interrupt() && local_softirq_pending为真,则进行软中断处理。这个条件有两个含义:1)!in_interrupt()表明不能处在中断上下文中,这个范围包括in_nmi、in_irq、in_softirq(Bottom-half disable)、in_serving_softirq,凡是处于这几种状态下,软中断都不会被执行;2)local_softirq_pending不为0,表明有软中断处理请求;
软中断执行的入口就是invoke_softirq,继续分析一波:
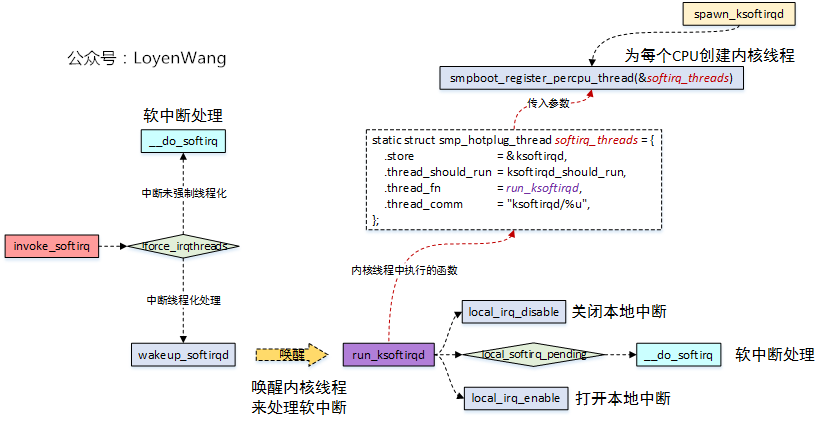
invoke_softirq函数中,根据中断处理是否线程化进行分类处理,如果中断已经进行了强制线程化处理(中断强制线程化,需要在启动的时候传入参数threadirqs),那么直接通过wakeup_softirqd唤醒内核线程来执行,否则的话则调用__do_softirq函数来处理;- Linux内核会为每个CPU都创建一个内核线程
ksoftirqd,通过smpboot_register_percpu_thread函数来完成,其中当内核线程运行时,在满足条件的情况下会执行run_ksoftirqd函数,如果此时有软中断处理请求,调用__do_softirq来进行处理;
上图中的逻辑可以看出,最终的核心处理都放置在__do_softirq函数中完成:
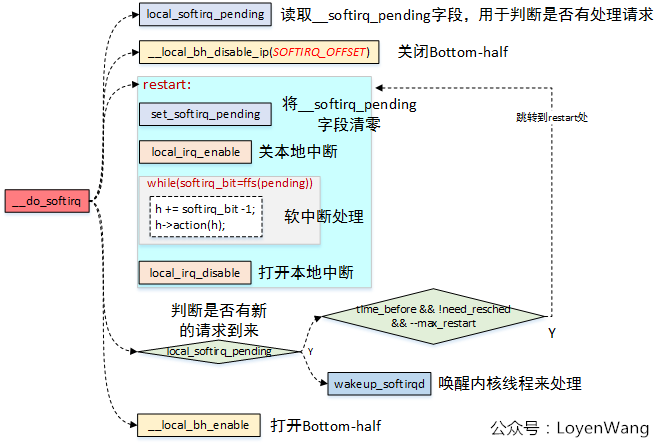
local_softirq_pending函数用于读取__softirq_pending字段,可以类比于设备驱动中的状态寄存器,用于判断是否有软中断处理请求;- 软中断处理时会关闭
Bottom-half,处理完后再打开; 软中断处理时,会打开本地中断,处理完后关闭本地中断,这个地方对应到上文中提到的Top-half和Bottom-half机制,在Bottom-half处理的时候,是会将中断打开的,因此也就能继续响应其他中断,这个也就意味着其他中断也能来打断当前的Bottom-half处理;while(softirq_bit = ffs(pending)),循环读取状态位,直到处理完每一个软中断请求;- 跳出
while循环之后,再一次判断是否又有新的软中断请求到来(由于它可能被中断打断,也就意味着可能有新的请求到来),有新的请求到来,则有三个条件判断,满足的话跳转到restart处执行,否则调用wakeup_sotfirqd来唤醒内核线程来处理:time_before(jiffies, MAX_SOFTIRQ_TIME),软中断处理时间小于两毫秒;!need_resched,当前没有进程调度的请求;max_restart = MAX_SOFTIRQ_RESTART,跳转到restart循环的次数不大于10次;
这三个条件的判断,是基于延迟和公平的考虑,既要保证软中断尽快处理,又不能让软中断处理一直占据系统,正所谓trade-off的艺术;
__do_softirq既然可以在中断处理过程中调用,也可以在ksoftirqd中调用,那么softirq的执行可能有两种context,插张图吧:

让我们来思考最后一个问题:硬件中断触发的时候是通过硬件设备的电信号,那么软中断的触发是通过什么呢?答案是通过raise_softirq接口:
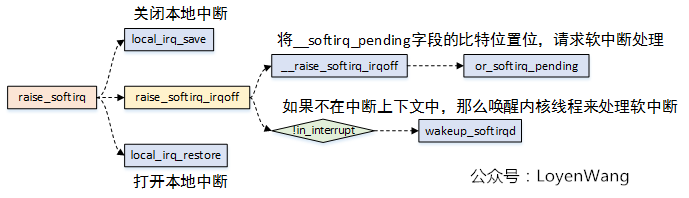
- 可以在中断处理过程中调用
raise_softirq来进行软中断处理请求,处理的实际也就是上文中提到过的irq_exit退出硬件中断上下文之后再处理; raise_softirq_irqoff函数中,最终会调用到or_softirq_pending,该函数会去读取本地CPU的irq_stat中__softirq_pending字段,然后将对应的软中断号给置位,表明有该软中断的处理请求;raise_softirq_irqoff函数中,会判断当前的请求的上下文环境,如果不在中断上下文中,就可以通过唤醒内核线程来处理,如果在中断上下文中处理,那就不执行;- 多说一句,在软中断整个处理流程中,会经常看到
in_interrupt()的条件判断,这个可以确保软中断在CPU上的串行执行,避免嵌套;
2.2.3 软中断执行之二:Bottom-half Enable后
第二种软中断执行的时间点,在Bottom-half使能的时候,通常用于并发处理,进程空间上下文中进行调用:

- 在讨论并发专题的时候,我们谈到过
Bottom-half与进程之间能产生资源争夺的情况,如果在软中断和进程之间有临界资源(软中断上下文优先级高于进程上下文),那么可以在进程上下文中调用local_bh_disable/local_bh_enable来对临界资源保护; - 图中左侧的函数,都是用于打开
Bottom-half的接口,可以看出是spin_lock_bh/read_lock_bh/write_lock_bh等并发处理接口的变种形式调用; __local_bh_enable_ip函数中,首先判断调用该本接口时中断是否是关闭的,如果已经关闭了再操作BH接口就会告警;preempt_count_sub需要与preempt_count_add配套使用,用于操作thread_info->preempt_count字段,加与减的值是一致的,而在__local_bh_enable_ip接口中,将cnt值的减操作分成了两步:preempt_count_sub(cnt-1)和preempt_count_dec,这么做的原因是执行完preempt_count_sub(cnt-1)后,thread_info->preempt_count字段的值保留了1,把抢占给关闭了,当do_softirq执行完毕后,再调用preempt_count_dec再减去剩下的1,进而打开抢占;- 为什么在使能
Bottom-half时要进行软中断处理呢?在并发处理时,可能已经把Bottom-half进行关闭了,如果此时中断来了后,软中断不会被处理,在进程上下文中打开Bottom-half时,这时候就会检查是否有软中断处理请求了;
3. tasklet
从上文中分析可以看出,tasklet是软中断的一种类型,那么两者有啥区别呢?先说结论吧:
- 软中断类型内核中都是静态分配,不支持动态分配,而
tasklet支持动态和静态分配,也就是驱动程序中能比较方便的进行扩展; - 软中断可以在多个CPU上并行运行,因此需要考虑可重入问题,而
tasklet会绑定在某个CPU上运行,运行完后再解绑,不要求重入问题,当然它的性能也就会下降一些;
3.1 数据结构

DEFINE_PER_CPU(struct tasklet_head, tasklet_vec)为每个CPU都分配了tasklet_head结构,该结构用来维护struct tasklet_struct链表,需要放到该CPU上运行的tasklet将会添加到该结构的链表中,内核中为每个CPU维护了两个链表tasklet_vec和tasklet_vec_hi,对应两个不同的优先级,本文以tasklet_vec为例;struct tasklet_struct为tasklet的抽象,几个关键字段如图所示,通过next来链接成链表,通过state字段来标识不同的状态以确保能在CPU上串行执行,func函数指针在调用task_init()接口时进行初始化,并在最终触发软中断时执行;
3.2 流程分析
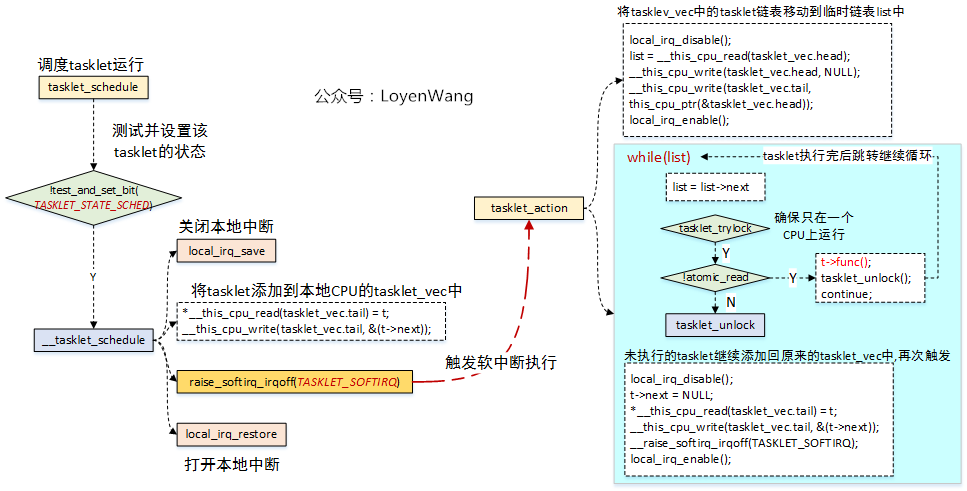
tasklet本质上是一种软中断,所以它的调用流程与上文中讨论的软中断流程是一致的;- 调度
tasklet运行的接口是tasklet_schedule,如果tasklet没有被调度则进行调度处理,将该tasklet添加到CPU对应的链表中,然后调用raise_softirq_irqoff来触发软中断执行; - 软中断执行的处理函数是
tasklet_action,这个在softirq_init函数中通过open_softirq函数进行注册的; tasklet_action函数,首先将该CPU上tasklet_vec中的链表挪到临时链表list中,然后再对这个list进行遍历处理,如果满足执行条件则调用t->func()执行,并continue跳转遍历下一个节点。如果不满足执行条件,则继续将该tasklet添加回原来的tasklet_vec中,并再次触发软中断;
3.3 接口
简单贴一下接口吧:
/* 静态分配tasklet */
DECLARE_TASKLET(name, func, data)
/* 动态分配tasklet */
void tasklet_init(struct tasklet_struct *t, void (*func)(unsigned long), unsigned long data);
/* 禁止tasklet被执行,本质上是增加tasklet_struct->count值,以便在调度时不满足执行条件 */
void tasklet_disable(struct tasklet_struct *t);
/* 使能tasklet,与tasklet_diable对应 */
void tasklet_enable(struct tasklet_struct *t);
/* 调度tasklet,通常在设备驱动的中断函数里调用 */
void tasklet_schedule(struct tasklet_struct *t);
/* 杀死tasklet,确保不被调度和执行, 主要是设置state状态位 */
void tasklet_kill(struct tasklet_struct *t);
收工!
欢迎关注个人公众号,不定期分享Linux内核机制文章。

【原创】Linux中断子系统(三)-softirq和tasklet的更多相关文章
- 【原创】Linux中断子系统(二)-通用框架处理
背景 Read the fucking source code! --By 鲁迅 A picture is worth a thousand words. --By 高尔基 说明: Kernel版本: ...
- Linux中断管理 (2)软中断和tasklet
目录: <Linux中断管理> <Linux中断管理 (1)Linux中断管理机制> <Linux中断管理 (2)软中断和tasklet> <Linux中断管 ...
- linux中断子系统:中断号的映射与维护初始化mmap过程
本文均属自己阅读源代码的点滴总结.转账请注明出处谢谢. 欢迎和大家交流.qq:1037701636 email:gzzaigcn2009@163.com 写在前沿: 好久好久没有静下心来整理一些东西了 ...
- Linux中断子系统:级联中断控制器驱动
Linux中断子系统 Linux中断子系统是个很大的话题,如下面的思维导图所示,包含硬件.驱动.中断上半部.中断下半部等等.本文着眼于中断控制器(PIC),特别是级联中断控制器驱动部分,对驱动的设计和 ...
- 【原创】Linux中断子系统(四)-Workqueue
背景 Read the fucking source code! --By 鲁迅 A picture is worth a thousand words. --By 高尔基 说明: Kernel版本: ...
- 【原创】Linux中断子系统(一)-中断控制器及驱动分析
背景 Read the fucking source code! --By 鲁迅 A picture is worth a thousand words. --By 高尔基 说明: Kernel版本: ...
- 【原创】中断子系统-ARM GPIO中断处理流程
目录 第一部分 GIC中断控制器的注册 1. GIC驱动分析 2.GIC驱动流程分析 第二部分 device node转化为platform_device 第三部分:platform_device注册 ...
- Linux时间子系统(三) 用户空间接口函数
一.前言 从应用程序的角度看,内核需要提供的和时间相关的服务有三种: 1.和系统时间相关的服务.例如,在向数据库写入一条记录的时候,需要记录操作时间(何年何月何日何时). 2.让进程睡眠一段时间 3. ...
- linux中断子系统
参考引用:http://www.wowotech.net/sort/irq_subsystem wowotech:一个很好的linux技术博客. 一.概述 目的 kernel管理硬件设备的方式:轮询. ...
随机推荐
- JSP知识点回顾
- CukeTest+Puppeteer的Web自动化测试(二)
上一篇我们讲了CukeTest+Puppeteer的相关理论知识,带大家认识熟悉了CukeTest如何运行与如何编写剧本,Puppeteer大体的理论体系与如何结合使用,但一直没有给大家进行上手实战操 ...
- 通用css 常用
复选框自定义样式input[type="checkbox"] { position: relative; width: 0.75rem; height: 0.75rem; back ...
- MyBatis的使用增删改查(两种分页查询)
文件目录 写一下每个文件的代码 UserDao.java package cn.zys.dao; import java.io.IOException; import java.util.List; ...
- 手把手教你Windows Linux双系统的安装与卸载
作者:-叶丶知秋 链接:https://blog.csdn.net/fanxueya1322/article/details/90205143 转载请保留出处 良许前言: 后台突然有很多小伙伴留言想看 ...
- 关于Tensorflow基于Windows安装那些事儿
声明:代码及博客小白一枚,如有错误,感谢指正~~ 众所周知,摘抄来温习一遍: Tensorflow 是一个采用数据流图(data flow graphs),用于数值计算的开源软件库.节点(Nodes) ...
- Java IO(二)File
Java IO(二)File 一.概述 在 Java 中,File 类是 java.io 包中唯一代表磁盘文件本身的对象,也就是说,如果希望在程序中操作文件和目录,则都可以通过 File 类来完成.F ...
- maven中scope
scope maven中scope的默认值是compilescope的分类1)compile 默认是compile.compile表示被依赖项目需要参与当前项目的编译,包括后续的测试,运行周期也参与其 ...
- & 加密
接口参数中sign加密方式: 1. 签名算法使用SHA256: 2. 服务方和消费方都需要校验签名: 3. 签名生成步骤: 第一步,设所有发送或者接收到的数据为集合M1,将集合M1内非空参数值的参数按 ...
- Rocket - util - ReduceOthers
https://mp.weixin.qq.com/s/gbR5fuDbE_nUFVxw-p4rsA 简单介绍ReduceOthers的实现. 1. 基本介绍 输入一组Bool元素 ...