teb教程7
融合自定义的障碍物
简介:本部分讲解怎样考虑其他节点发布的多边形的障碍物。
1.在一些应用当中,可能不想依赖于代价地图或者想添加其他的除了点状的障碍物。你可以发送你自己的障碍物列表到teb_local_planner包里面,通过指定话题/obstacles.
下面的消息类型costmap_converter/ObstacleArrayMsg是costmap_converter包的一部分。说明了以下障碍物的类型:
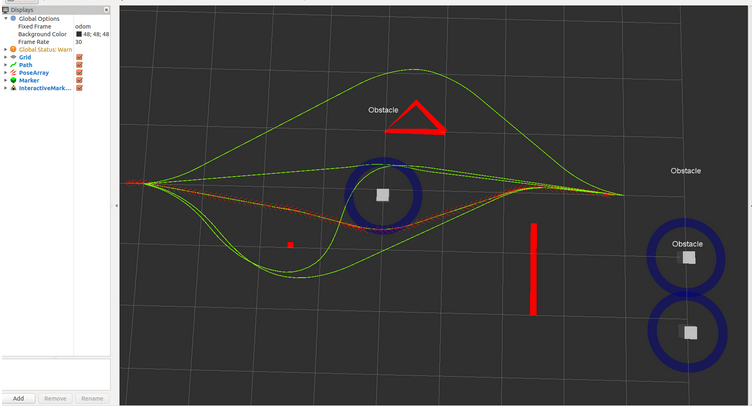
点状障碍物:提供了单个顶点的几何形状;
圆圈障碍物:提供了单个顶点且非零半径的几何形状;
线障碍物:提供了两个顶点的几何形状;
多边形障碍物:提供了不只2个顶点的多边形;
2.写一个简单的障碍物发不器
创建一个简单的python节点类发不一些障碍物;对于规划部分,会运行test_optim_node节点。如下publish_obstacles.py
#!/usr/bin/env python
import rospy, math
from costmap_converter.msg import ObstacleArrayMsg, ObstacleMsg
from geometry_msgs.msg import PolygonStamped, Point32 def publish_obstacle_msg():
rospy.init_node("test_obstacle_msg") pub = rospy.Publisher('/test_optim_node/obstacles', ObstacleArrayMsg, queue_size=) obstacle_msg = ObstacleArrayMsg()
obstacle_msg.header.stamp = rospy.Time.now()
obstacle_msg.header.frame_id = "odom" # CHANGE HERE: odom/map # Add point obstacle
obstacle_msg.obstacles.append(ObstacleMsg())
obstacle_msg.obstacles[].id =
obstacle_msg.obstacles[].polygon.points = [Point32()]
obstacle_msg.obstacles[].polygon.points[].x = 1.5
obstacle_msg.obstacles[].polygon.points[].y =
obstacle_msg.obstacles[].polygon.points[].z = # Add line obstacle
obstacle_msg.obstacles.append(ObstacleMsg())
obstacle_msg.obstacles[].id =
line_start = Point32()
line_start.x = -2.5
line_start.y = 0.5
line_end = Point32()
line_end.x = -2.5
line_end.y =
obstacle_msg.obstacles[].polygon.points = [line_start, line_end] # Add polygon obstacle
obstacle_msg.obstacles.append(ObstacleMsg())
obstacle_msg.obstacles[].id =
v1 = Point32()
v1.x = -
v1.y = -
v2 = Point32()
v2.x = -0.5
v2.y = -1.5
v3 = Point32()
v3.x =
v3.y = -
obstacle_msg.obstacles[].polygon.points = [v1, v2, v3] r = rospy.Rate() # 10hz
t = 0.0
while not rospy.is_shutdown(): # Vary y component of the point obstacle
obstacle_msg.obstacles[].polygon.points[].y = *math.sin(t)
t = t + 0.1 pub.publish(obstacle_msg) r.sleep() if __name__ == '__main__':
try:
publish_obstacle_msg()
except rospy.ROSInterruptException:
pass
如何运行:
roslaunch teb_local_planner test_optim_node.launch
roslaunch mypublisher publish_obstacles.py
相关参数:
在规划中,与自定义障碍物相关的参数
~<name>/min_obstacle_dist: Desired minimal distance from obstacles ~<name>/include_costmap_obstacles: Deactivate costmap obstacles completely ~<name>/costmap_obstacles_behind_robot_dist: Maximum distance behind the robot searched for occupied costmap cells. ~<name>/obstacle_poses_affected: Specify how many trajectory configurations/poses should be taken into account next to the closest one. ~<name>/weight_obstacle: Optimization weight for keeping a distance to obstacles. ~<name>/footprint_model: The robot footprint model
teb教程7的更多相关文章
- teb教程1
http://wiki.ros.org/teb_local_planner/Tutorials/Setup%20and%20test%20Optimization 简介:本部分关于teb怎样优化轨迹以 ...
- teb教程8
融合动态障碍物 简介:考虑怎样把其他节点发布的动态障碍物考虑进来 1.本部分演示了动态障碍物该如何被包含到teb_local_planner中. 2.写一个简单的动态障碍物的发布器publish_dy ...
- teb教程3
配置和运行机器人导航 简介:配置teb_local_planner作为navigation中local planner的插件 参考teb安装 由于局部代价地图的大小和分辨率对优化性能影响很大,因为占据 ...
- teb教程10 teb questions
http://wiki.ros.org/teb_local_planner/Tutorials/Frequently%20Asked%20Questions
- teb教程9
通过costmap_converter来跟踪和包含动态障碍物 简介:利用costmap_converter来很容易跟踪动态障碍物 1.costmap_converter中提供了一个插件称之为costm ...
- teb教程6
代价地图的转换 简介:本部分关于怎样把代价地图转换插件应用到转换占据栅格costmap2d到几何形状来优化(测试阶段) teb_local_planner包支持costmap_converter插件, ...
- teb教程5
跟随全局规划器 简介:本部分是关于如何配置局部规划器严格跟随全局规划,也包括调节在时优和路径跟随上的权衡. 1.先看一下via-points当前的优化行为:启动下面节点 roslaunch teb_l ...
- teb教程4
障碍物避障以及机器人足迹模型 简介:障碍物避障的实现,以及必要参数的设置对于机器人足迹模型和其对应的影响 1.障碍物避障是怎样工作的 1.1 惩罚项 障碍物避障作为整个路径优化的一部分.显然,优化是找 ...
- teb教程2
http://wiki.ros.org/teb_local_planner/Tutorials/Inspect%20optimization%20feedback 检查优化反馈 简介:怎样检查优化的轨 ...
随机推荐
- Sql Server Management Studio 18 打开闪退问题
解决方案 找到MSSMS安装位置,例如我是安装到了D:\Program Files (x86)\Microsoft SQL Server Management Studio 18 将D:\Progra ...
- opengl 库glew
OpenGL OpenGL是个专业的3D程序接口,是一个功能强大,调用方便的底层3D图形库.OpenGL的前身是SGI公司为其图形工作站开发的IRIS GL.IRIS GL是一个工业标准的3D图形软件 ...
- Quartz -----定时任务框架
一.什么是Quartz 由java开发用来执行定时任务,类似于java.util.Timer. 但是相较于Timer,quartz增加了很多功能: 持久性 ...
- windows消息机制(转)
1. 引言Windows 在操作系统平台占有绝对统治地位,基于Windows 的编程和开发越来越广泛.Dos 是过程驱动的,而Windows 是事件驱动的[6],这种差别的存在使得很多Dos 程序员不 ...
- QML学习笔记(八)— QML实现列表侧滑覆盖按钮
QML实现列表右边滑动删除按钮,并覆盖原有的操作按钮,点击可实现删除当前项 本文链接:QML实现列表侧滑覆盖按钮 作者:狐狸家的鱼 GitHub:八至 列表实现在另一篇博客已经提及,列表可选中.拖拽. ...
- 杂谈、 素材资源,没有美工不会ps一样可以美观
免费素材网站 阿里巴巴矢量图,大部分图标都有颜色像素可选,格式可选3种, http://www.iconfont.cn/plus/home/index?spm=a313x.7781069.199891 ...
- jQuery判断checkbox是否选中的4种方法
方法一: ).checked) { // do something } 方法二: if($('#checkbox-id').is(':checked')) { // do something } 方法 ...
- ICU lirary DownLoad
{ //https://github.com/unicode-org/icu }
- 【Http】队头阻塞(Head of line blocking)多路复用(Multiplexing)
图中第一种请求方式,就是单次发送request请求,收到response后再进行下一次请求,显示是很低效的. 于是http1.1提出了管线化(pipelining)技术,就是如图中第二中请求方 ...
- 【POM】maven profile切换正式环境和测试环境
有时候,我们在开发和部署的时候,有很多配置文件数据是不一样的,比如连接mysql,连接redis,一些properties文件等等 每次部署或者开发都要改配置文件太麻烦了,这个时候,就需要用到mave ...