Harris 角点检测
一 、Motivation
对于做图像处理的人来说,Harris角点检测肯定听过,1988年发表的文章“A combined corner and edge detector”描述了这种角点检测方法,这篇论文朴实无华,对于图像处理入门来说,非常值得读一读。
Harris角点检测的提出是图像匹配问题的需求,在立体视觉(stereo vision)和运动估计(motion estimation)中,常常需要在两个view(立体视觉)或者同一视频的两帧(运动估计)中找到对应的特征(correspondence feature),如下图1.1所示。
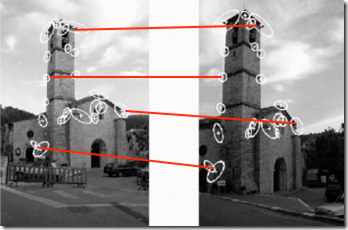
图 1.1
以patch matching 为例,若在两个view中提取出来的patch 如下图1.2,那么匹配两幅图中相似的patch是比较容易的,
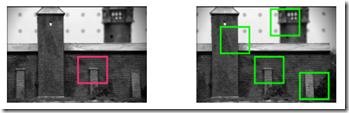

图 1.2
而如果两个view中提取出来的patch如下图1.3,那么匹配就不那么容易了,
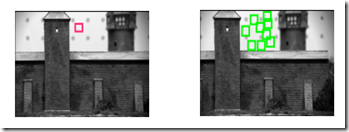

图 1.3
为什么呢?因为图1.2中的patch很独特,信息丰富,图1.3 中的patch单独看来毫无特点,极易混淆。我们称图1.2中的特征为“好特征”,图1.3中的特征是”坏特征“。
那么什么是好特征,什么是坏特征?我认为有两个要考虑的:1 稳定,对缩放,视角变换,光线变化等稳定 2.易区分 。
角点就具有这样的特征,角点如何描述,请看图1.4,
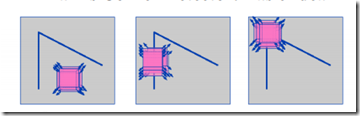
图1.4
上图具体解释是这样的,给定一个窗口,如果包含角点,那么这个窗口平移(u,v)个单位,不管这个平移是往哪个方向,窗口中像素对应位置的变化都比较大,而如果包含的是一条边缘,在沿着边缘平移窗口时,窗口中像素强度变化基本没有,而垂直于边缘移动时,变化强烈,对于平坦区域,怎么移动都没有多大变化,当然,这里的平移都是小范围平移。
二、Mathematics representation
数学描述这种强度变化如下图2.1.
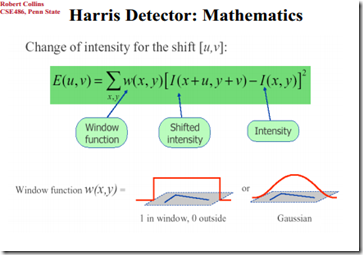
图2.1
可以看到,这个公式表示往各个方向移动时强度变化的累加和,控制w就可以控制平移后强度累加的方式。
然后用一级泰勒展开近似I(x+u,y+v)-I(x,y),并将上图的公式用矩阵的形式表达出来,有:
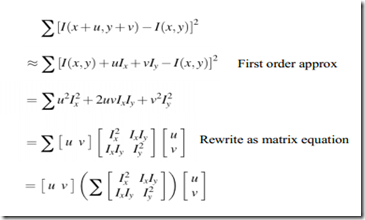
图2.2
最后 E(u,v) 可以表示为:
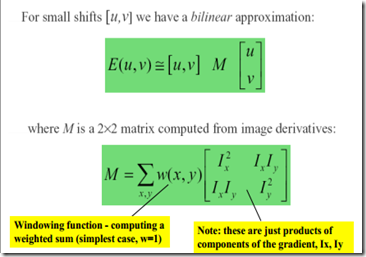
图 2.3
注意到此时M是对称矩阵,可以表示为M = Q A QT 的形式 ,A 为对角矩阵,因此,对角中即为M的特征值,因此,一定要M的2个特征值都比较大才能保证E总是很大。
实际计算过程中,用高斯核来表示w(x,y).
Harris 角点检测的过程如下:
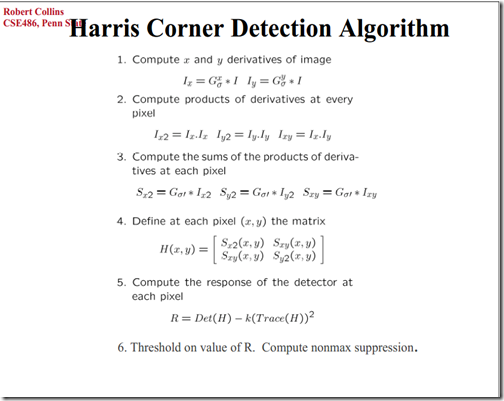
图2.4
需要注意的是,求微分图像和第三步的W矩阵都是可以调节或者换成其他形式的,W换成高斯核主要是利用了它各项同性的性质。
三、implementation
最终matlab代码(转自网上)实现如下:
% Harris detector % The code calculates % the Harris Feature Points(FP) % % When u execute the code, the test image file opened % and u have to select by the mouse the region where u % want to find the Harris points, % then the code will print out and display the feature % points in the selected region. % You can select the number of FPs by changing the variables % max_N & min_N % A. Ganoun load Imag I =double(frame); %**************************** imshow(frame); k = waitforbuttonpress; point1 = get(gca,'CurrentPoint'); %button down detected rectregion = rbbox; %%%return figure units point2 = get(gca,'CurrentPoint');%%%%button up detected point1 = point1(1,1:2); %%% extract col/row min and maxs point2 = point2(1,1:2); lowerleft = min(point1, point2); upperright = max(point1, point2); ymin = round(lowerleft(1)); %%% arrondissement aux nombrs les plus proches ymax = round(upperright(1)); xmin = round(lowerleft(2)); xmax = round(upperright(2)); %*********************************** Aj=6; cmin=xmin-Aj; cmax=xmax+Aj; rmin=ymin-Aj; rmax=ymax+Aj; min_N=12;max_N=16; %%%%%%%%%%%%%%Intrest Points %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% sigma=2; Thrshold=20; r=6; disp=1; dx = [-1 0 1; -1 0 1; -1 0 1]; % The Mask dy = dx'; %%%%%% Ix = conv2(I(cmin:cmax,rmin:rmax), dx, 'same'); Iy = conv2(I(cmin:cmax,rmin:rmax), dy, 'same'); g = fspecial('gaussian',max(1,fix(6*sigma)), sigma); %%%%%% Gaussien Filter
%%%%% Ix2 = conv2(Ix.^2, g, 'same'); Iy2 = conv2(Iy.^2, g, 'same'); Ixy = conv2(Ix.*Iy, g,'same'); %%%%%%%%%%%%%% k = 0.04; R11 = (Ix2.*Iy2 - Ixy.^2) - k*(Ix2 + Iy2).^2; R11=(1000/max(max(R11)))*R11; R=R11; ma=max(max(R)); sze = 2*r+1; MX = ordfilt2(R,sze^2,ones(sze)); R11 = (R==MX)&(R>Thrshold); count=sum(sum(R11(5:size(R11,1)-5,5:size(R11,2)-5))); figure;plot(R11); loop=0; while (((count<min_N)|(count>max_N))&(loop<30)) if count>max_N Thrshold=Thrshold*1.5; elseif count < min_N Thrshold=Thrshold*0.5; end R11 = (R==MX)&(R>Thrshold); count=sum(sum(R11(5:size(R11,1)-5,5:size(R11,2)-5))); loop=loop+1; end R=R*0; R(5:size(R11,1)-5,5:size(R11,2)-5)=R11(5:size(R11,1)-5,5:size(R11,2)-5); [r1,c1] = find(R); PIP=[r1+cmin,c1+rmin];%% IP %%%%%%%%%%%%%%%%%%%% Display Size_PI=size(PIP,1); for r=1: Size_PI I(PIP(r,1)-2:PIP(r,1)+2,PIP(r,2)-2)=255; I(PIP(r,1)-2:PIP(r,1)+2,PIP(r,2)+2)=255; I(PIP(r,1)-2,PIP(r,2)-2:PIP(r,2)+2)=255; I(PIP(r,1)+2,PIP(r,2)-2:PIP(r,2)+2)=255; end imshow(uint8(I)) |
Harris 角点检测的更多相关文章
- Harris角点检测算法优化
Harris角点检测算法优化 一.综述 用 Harris 算法进行检测,有三点不足:(1 )该算法不具有尺度不变性:(2 )该算法提取的角点是像素级的:(3 )该算法检测时间不是很令人满意. 基于以上 ...
- Harris角点检测
代码示例一: #include<opencv2/opencv.hpp> using namespace cv; int main(){ Mat src = imread(); imshow ...
- Harris角点检测算原理
主要参考了:http://blog.csdn.net/yudingjun0611/article/details/7991601 Harris角点检测算子 本文将该文拷贝了过来,并做了一些数学方面的 ...
- Harris角点检测原理分析
看到一篇从数学意义上讲解Harris角点检测很透彻的文章,转载自:http://blog.csdn.net/newthinker_wei/article/details/45603583 主要参考了: ...
- cv2.cornerHarris()详解 python+OpenCV 中的 Harris 角点检测
参考文献----------OpenCV-Python-Toturial-中文版.pdf 参考博客----------http://www.bubuko.com/infodetail-2498014. ...
- Opencv学习笔记------Harris角点检测
image算法测试iteratoralgorithmfeatures 原创文章,转载请注明出处:http://blog.csdn.net/crzy_sparrow/article/details/73 ...
- harris角点检测的简要总结
目录 1. 概述相关 2. 原理详解 1) 算法思想 2) 数学模型 3) 优化推导 3. 具体实现 1) 详细步骤 2) 最终实现 4. 参考文献 1. 概述相关 harris角点检测是一种特征提取 ...
- OpenCV-Python:Harris角点检测与Shi-Tomasi角点检测
一.Harris角点检测 原理: 角点特性:向任何方向移动变换都很大. Chris_Harris 和 Mike_Stephens 早在 1988 年的文章<A CombinedCorner an ...
- 第十一节、Harris角点检测原理(附源码)
OpenCV可以检测图像的主要特征,然后提取这些特征.使其成为图像描述符,这类似于人的眼睛和大脑.这些图像特征可作为图像搜索的数据库.此外,人们可以利用这些关键点将图像拼接起来,组成一个更大的图像,比 ...
随机推荐
- XSS与CSRF两种跨站攻击比较
XSS:跨站脚本(Cross-site scripting) CSRF:跨站请求伪造(Cross-site request forgery) 在那个年代,大家一般用拼接字符串的方式来构造动态SQL 语 ...
- fiddler 插件开发二
本篇主要讲解Fildder插件开发中的涉及到的主要接口与类. 1.IFiddlerExtension 接口 如果要开发的自定义插件有UI界面,则需要实现IFiddlerExtension 接口.你程序 ...
- 接口和JAVA设计模式
- linux2.6中的工作队列接口 workqueue_struct
http://blog.csdn.net/sfrysh/article/details/5801786 工作队列接口 工作队列接口是在2.5的开发过程中引入的,用于取代任务队列接口(用于调 度内核任务 ...
- fd_set 用法
http://www.cnblogs.com/wolflion/archive/2011/07/13/2539137.html select()函数主要是建立在fd_set类型的基础上的.fd_set ...
- lighttpd 介绍及安装
一,为什么要使用lighttpd? apache不可以吗? 在支持纯静态的对象时,比如图片,文件等 , lighttpd速度更快,更理想 (lighttp 图片处理好,nginx负载 ...
- atoi函数的实现(考虑不同进制、溢出)
2013-07-08 16:21:15 atio就是将ASCII码表示的字符为int型数据,看似简单的问题,实际上需要考虑的很多.对于简单的问题,考虑是否全面就显得特别重要. 小结: 对于该函数的实现 ...
- 蓝牙(2)用BluetoothAdapter搜索蓝牙设备示例
注意在搜索之前要先打开蓝牙设备 package com.e.search.bluetooth.device; import java.util.Set; import android.app.Acti ...
- COM, COM+ and .NET 的区别
所有的优秀程序员都会尽自己的最大努力去使自己所写的程序具有更好的可重用性,因为它可以让你快速地写出更加健壮和可升级性的程序. 有两种使代码重用的选择: 1.白盒:最简单的一种,就是把你的程序片拷贝到另 ...
- volicety常用方法
1.volicety得到某个元素的个数 $extendsInfos.size() 2.volicety 布尔值判断: 如果a为null,#if($a) ,产生的判断值是false 等同于#if(fa ...