Kalman filter, Laser/Lidar measurement
You can download this project from
https://github.com/lionzheng10/LaserMeasurement
The laser measurement project is come from Udacity Nano degree course "self driving car" term2, Lesson5.
Introduction
Imagine you are in a car equipped with sensors on the outside. The car sensors can detect objects moving around: for example, the sensors might detect a bicycle.
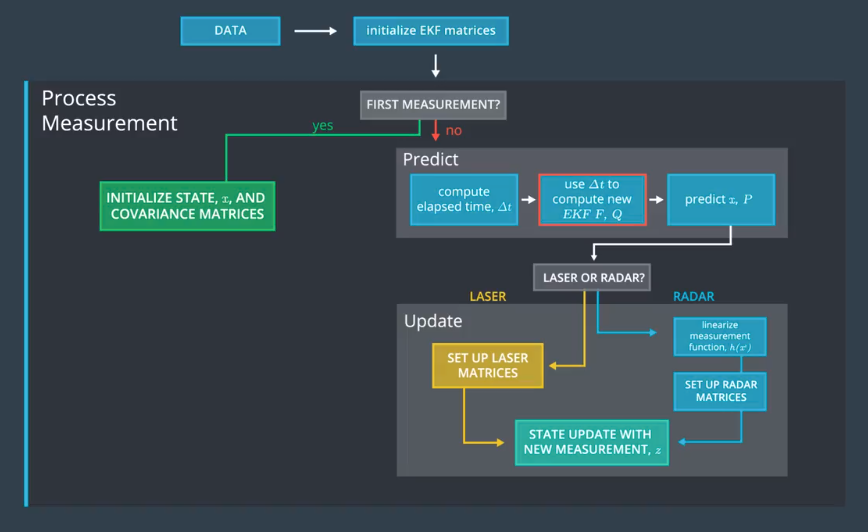
The Kalman Filter algorithm will go through the following steps:
- first measurement - the filter will receive initial measurements of the bicycle's position relative to the car. These measurements will come from a radar or lidar sensor.
- initialize state and covariance matrices - the filter will initialize the bicycle's position based on the first measurement.
- then the car will receive another sensor measurement after a time period Δt
- predict - the algorithm will predict where the bicycle will be after time Δt. One basic way to predict the bicycle location after Δt is to assume the bicycle's velocity is constant; thus the bicycle will have moved velocity * Δt. In the extended Kalman filter lesson, we will assume the velocity is constant; in the unscented Kalman filter lesson, we will introduce a more complex motion model.
- update - the filter compares the "predicted" location with what the sensor measurement says. The predicted location and the measured location are combined to give an updated location. The Kalman filter will put more weight on either the predicted location or the measured location depending on the uncertainty of each value.
- then the car will receive another sensor measurement after a time period Δt. The algorithm then does another predict and update step.
Kalman filter equation description
Kalman Filter overview
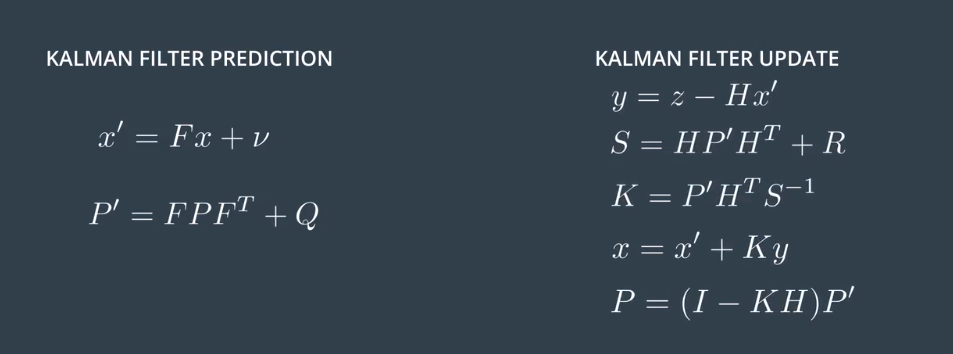
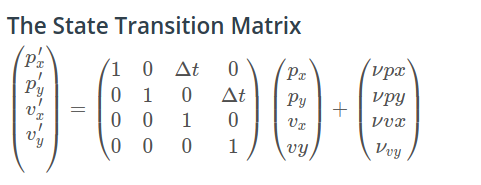
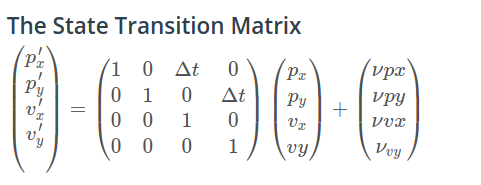
2D state motion. State transition matrix, x′ = Fx + v
- x is the mean state vector(4x1).For an extended Kalman filter, the mean state vector contains information about the object's position and velocity that you are tracking. It is called the "mean" state vector because position and velocity are represented by a gaussian distribution with mean x.
- v is a prediction noise (4x1)
- F is a state transition matrix (4 x 4), it's value is depend on Δt
- P is the state covariance matrix, which contains information about the uncertainty of the object's position and velocity.
- Q is process covariance matrix (4x4), see below
- z is the sensor information that tells where the object is relative to the car.
- y is difference between where we think we are with what the sensor tell us
y = z - Hx'. - H is a transform matrix. Depend on the shape of x and the shape of y, H is fixed matrix.
- R is the uncertainty of sensor measurement.
- S is the total uncertainty.
- K , often called Kalman filter gain, combines the uncertainty of where we think we are P' with the uncertainty of our sensor measurement R.
State transition Matrix F
Process Covariance Matrix Q
We need the process vovariance matrix to model the stochastic part of the state transition function.First I'm gosing to show you how the acceleration is expressed by the kinematic equations.And then I'm going to use that information to derive the process covariance matrix Q.

Say we have two consecutive observations of the same pedestrian with initial and final velocities. From the kinematic formulas we can derive the current position and speed as a function of previous state variables, including the change in the velocity or in other words, including the acceleration. You can see how this is derived below.
Looking at the deterministic part of our motion model, we assume the velocity is constant. However, in reality the pedestrian speed might change.Since the acceleration is unknown, we can add it to the noise component.And this random noise would be expressed analytically as in the last terms in the equation.
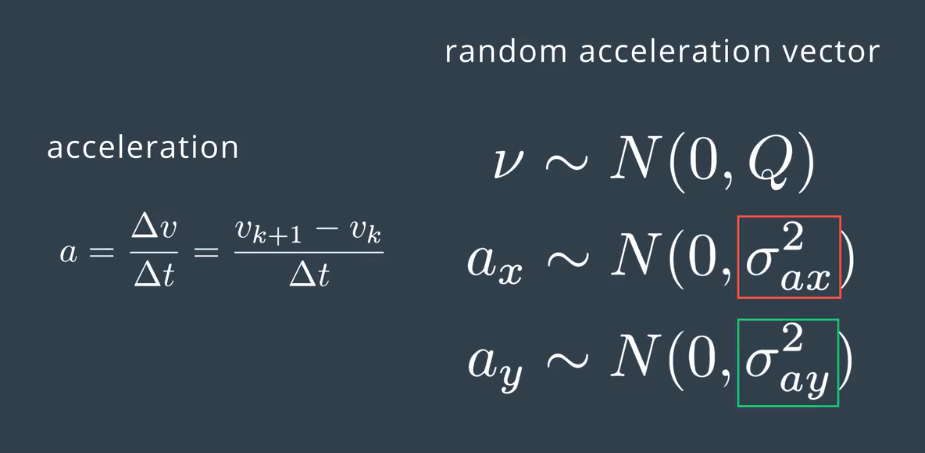
So, we have a random acceleration vector in this form, which is described by a 0 mean and the covariance matrix, Q. Delta t is computed at each Kalman filter step, and the acceleration is a random vector with 0 mean and standard deviations sigma ax and sigma ay.
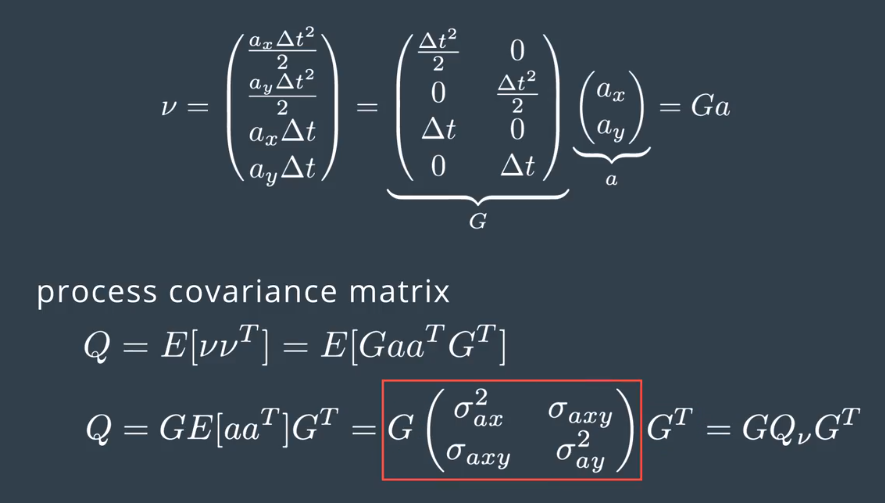
This vector can be decomposed into two components. A four by two matrix G which does not contain random variables. a, which contains the random acceleration components.
Based on our noise vector, we can define now the new covariance matrix Q. The covariance matrix is defined as the expectation value of the noise vector. mu times the noise vector mu transpose.So, let's write this down. As matrix G does not contain random variables, we can put it outside expectation calculation.
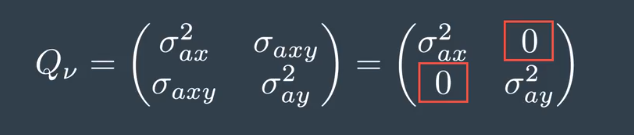
This leaves us with three statistical moments. The expectation of ax times ax, which is the variance of ax, sigma ax squared. The expectation if ay time ay which is the variance of ay, sigma ay squared. And the expectation of ax times ay which is the covariance of ax and ay. Ax and ay are assumed uncorrelated noise processes. This means that the covariace sigma ax, ay in Q nu is 0. So after combining everything in one matrix, we obtain our four by four Q matrix.
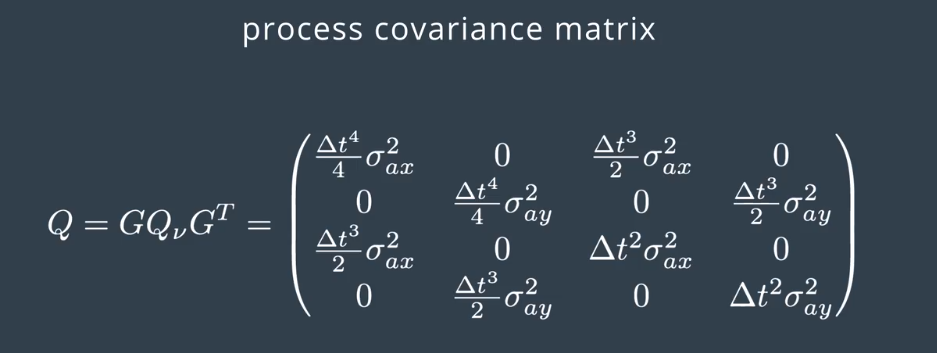
So after combining everything in one matrix, we obtain our four by four Q matrix.
Program structure
- main.cpp
The main.cpp readin the data file, extract data to a "Measurement package". Creat a tracking instance to analyze the data. - kalman_filter.h
DeclereKalmanFilterclass - kalman_filter.cpp
ImplementKalmanFilterfunctions,Predict()andUpdate() - tracking.h
Declare antrackingclass, it include anKalmanFilterinstance. - measurement_package.h
Define an classMeasurementPackageto store sensor type and measurement data. - tracking.cpp
The constructor functionTracking()declare the size and initial value ofKalman filtermatixes.
TheProcessMeasurementfunction process a single measurement, it compute the time elapsed between the current and previous measurements. Set the process covariance matrix Q. Call kalman filter functionpredictandupdate. And output state vector and Covariance Matrix. - obj_pose-laser-radar-synthetic-input.txt
A data file download from course web site, put it in the same folder with excutable file. - Eigen folder
Library for operate matix and vector and so on. Put this folder insrcfolder.
Makefile structure
- CMakeLists.txt
How to build and run this project
I am using ubuntu 16.4
- make sure you have cmake
sudo apt-get install camke - at the top level of the project repository
mkdir build && cd build - from /build
cmake .. && make - copy
obj_pose-laser-radar-synthetic-input.txttobuildfolder - from /build
./main
This is what the output looks like.
lion@HP6560b:~/carnd2/LaserMeasurement/build$ ./main------ step0------Kalman Filter Initialization------ step1------z_(lidar measure value: px,py)=0.9685210.40545x_(state vector: px,py,vx,vy)=0.967490.4058624.58427-1.83232P_(state Covariance Matrix)=0.0224541 0 0.204131 00 0.0224541 0 0.2041310.204131 0 92.7797 00 0.204131 0 92.7797------ step2------z_(lidar measure value: px,py)=0.9477520.636824x_(state vector: px,py,vx,vy)=0.9583650.6276310.1103682.04304P_(state Covariance Matrix)=0.0220006 0 0.210519 00 0.0220006 0 0.2105190.210519 0 4.08801 00 0.210519 0 4.08801
Kalman filter, Laser/Lidar measurement的更多相关文章
- 卡尔曼滤波—Simple Kalman Filter for 2D tracking with OpenCV
之前有关卡尔曼滤波的例子都比较简单,只能用于简单的理解卡尔曼滤波的基本步骤.现在让我们来看看卡尔曼滤波在实际中到底能做些什么吧.这里有一个使用卡尔曼滤波在窗口内跟踪鼠标移动的例子,原作者主页:http ...
- 卡尔曼滤波器【Kalman Filter For Dummies】
搬砖到此: A Quick Insight As I mentioned earlier, it's nearly impossible to grasp the full meaning o ...
- [OpenCV] Samples 14: kalman filter
Ref: http://blog.csdn.net/gdfsg/article/details/50904811 #include "opencv2/video/tracking.hpp&q ...
- (转) How a Kalman filter works, in pictures
How a Kalman filter works, in pictures I have to tell you about the Kalman filter, because what it d ...
- [Math]理解卡尔曼滤波器 (Understanding Kalman Filter) zz
1. 卡尔曼滤波器介绍 卡尔曼滤波器的介绍, 见 Wiki 这篇文章主要是翻译了 Understanding the Basis of the Kalman Filter Via a Simple a ...
- [Math]理解卡尔曼滤波器 (Understanding Kalman Filter)
1. 卡尔曼滤波器介绍 卡尔曼滤波器的介绍, 见 Wiki 这篇文章主要是翻译了 Understanding the Basis of the Kalman Filter Via a Simple a ...
- [Scikit-learn] Dynamic Bayesian Network - Kalman Filter
看上去不错的网站:http://iacs-courses.seas.harvard.edu/courses/am207/blog/lecture-18.html SciPy Cookbook:http ...
- 泡泡一分钟:Robust Attitude Estimation Using an Adaptive Unscented Kalman Filter
张宁 Robust Attitude Estimation Using an Adaptive Unscented Kalman Filter 使用自适应无味卡尔曼滤波器进行姿态估计链接:https: ...
- 详解Kalman Filter
中心思想 现有: 已知上一刻状态,预测下一刻状态的方法,能得到一个"预测值".(当然这个估计值是有误差的) 某种测量方法,可以测量出系统状态的"测量值".(当然 ...
随机推荐
- day28 socketserver
1. socketserver 多线程用的 例 import socket import time client=socket.socket() client.connect(("1 ...
- vue入门----------scss的配置使用
1.安装相应的依赖 cnpm install sass-loader --save-dev cnpm install node-sass --save-dev 2.在build文件下的webpack. ...
- 苏D_8M150
20161226 麦德龙 西边 弄堂 前车 转弯 刹车,我 刹车,下雨路滑,滑到.没撞到前车.车型号没看...只记了车牌... 右手撑了一下,肩膀估计是撑伤了,举起来 比较疼... 不知 该如何处理, ...
- APP测试总结2
一.App测试流程与web项目流程区别 1.对UI要求比较高,需要更加注重用户体验.对于一个小小的屏幕,如何让用户使用更加轻便.简介.易用. 2.App是调用服务端接口展示数据.我们测试需要可以判断问 ...
- JavaSE---对象序列化
1.对象序列化机制 允许把内存中的Java对象转换成平台无关的二进制流,从而可以将二进制流持久保存到磁盘 或 在网络中直接传输: (目的:使得对象可以脱离程序的运行而独立存在) package com ...
- Transition FrameWork
Android Transition Framework可以实现三种效果: 不同Activity之间切换时,Activityc的内容(contentView)转场动画 不同Activity之间切换时, ...
- python get_dummies与cut离散化数据
- 树形dp学习
学习博客:https://www.cnblogs.com/qq936584671/p/10274268.html 树的性质:n个点,n-1条边,任意两个点之间只存在一条路径,可以人为设置根节点,对于任 ...
- (转)vim(vi)常用操作及记忆方法
vim(vi)常用操作及记忆方法 原文:https://www.cnblogs.com/doseoer/p/6241443.html vi(vim)可以说是linux中用得最多的工具了,不管你配置服务 ...
- 批量处理标签属性中document.getElementsByName()的替代方案
背景 今天在逛知乎时候,看到一个JavaScript方面的问题: 最近在学习JavaScript DOM,就好奇地查阅资料,以及请教学长,得到下面解答: http://www.w3help.org/z ...