MicroPython教程之TPYBoard开发板DIY小型家庭气象站
众所周知,iPhone6/6Plus内置气压传感器,不过大家对于气压传感器还是很陌生。跟字面的意思一样,气压传感器就是用来测量气压的,但测量气压对于普通的手机用户来说又有什么作用呢?
海拔高度测量
对于喜欢登山的人来说,会非常关心自己所处的高度。海拔高度的测量方法,一般常用的有2种方式,一是通过GPS全球定位系统,二是通过测出大气压,然后根据气压值计算出海拔高度。由于受到技术和其它方面原因的限制,GPS计算海拔高度一般误差都会有十米左右,而如果在树林里或者是在悬崖下面时,有时候甚至接收不到GPS卫星信号。而气压的方式可选择的范围会广些,而且可以把成本控制的比较低。在手机原有GPS的基础上再增加气压传感器的功能,可让三维定位更加精准。
最近发现一块好玩的开发板——TPYBoardv702,这个板子可以定位、发短信、打电话,并且板载温湿度传感器、光敏传感器以及蜂鸣器,可以DIY很多有趣的东西,下面我们可以用这个板子加一个气压传感器来做一个小型气象站,来张实物图:
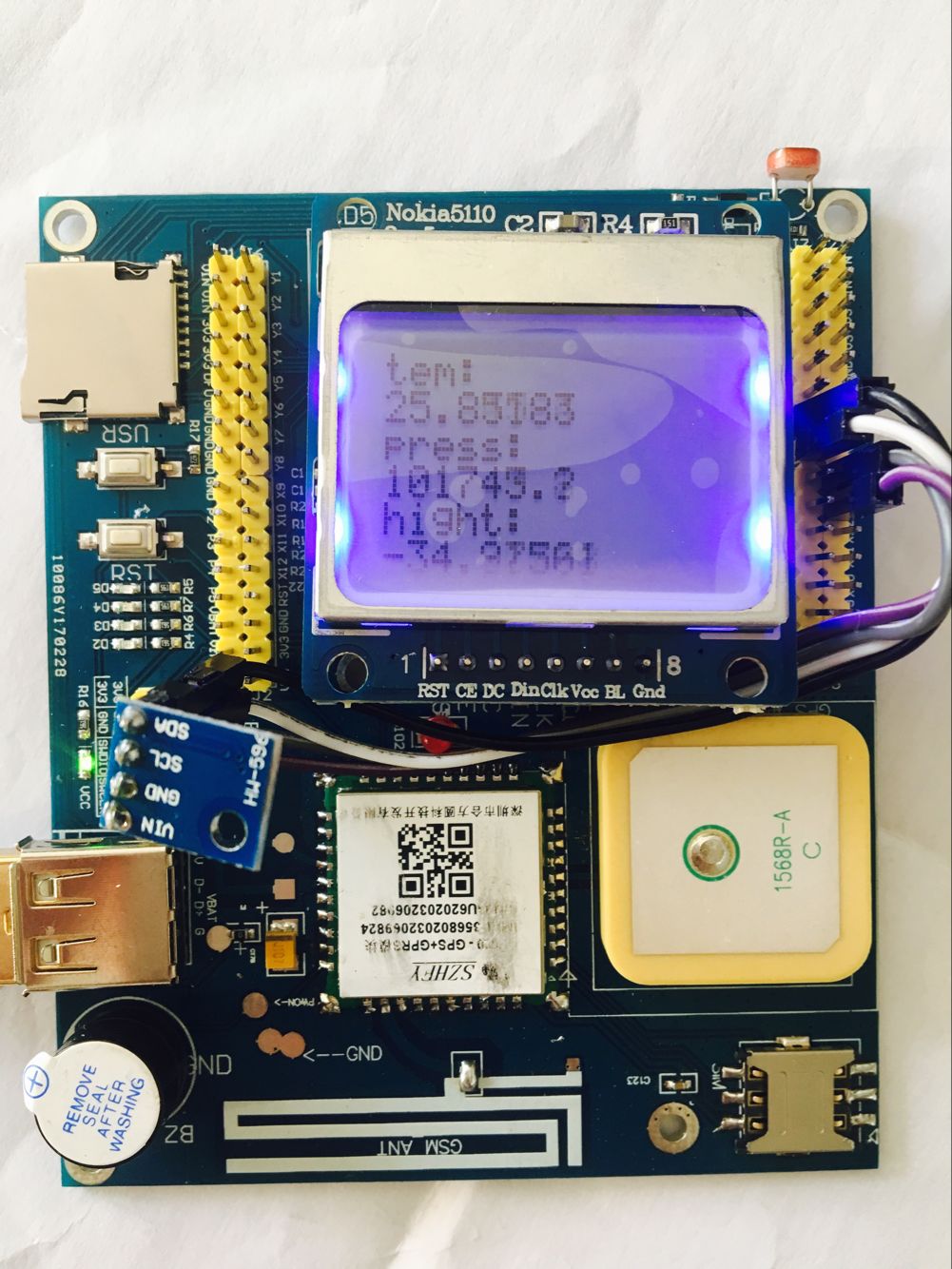
TPYBoardv702
定位功能我就不多说了,如果需要的话可以参考
http://docs.tpyboard.com/zh/latest/tpyboard/tutorial/v702/latitude/。
那么我们利用这块板子跟BMP180气压传感器来做一个小型家庭气象站,来检测当地温度以及当地气压与海拔,如果想做更好玩的东西,可以接其他传感器或者加个继电器来控制其他设备。
BMP180是一直常见的气压传感器,BMP180是一款高精度、小体积、超低能耗的压力传感器,可以应用在移动设备中,它的性能卓越,精度最低可以达到0.03hPa,并且耗电极低,只有3μA;BMP180采用强大的8-pin陶瓷无引线芯片承载(LCC)超薄封装,可以通过I2C总线直接与各种微处理器相连。

BMP180实物图
硬件接线图
效果展示图
连接完毕后,将font.py,upcd8544.py与bmp180的库导入,就可以通过以下方法分别读取温度、气压、海拔高度了。
源代码
foot.py,upcd8544.py库的下载地址
http://www.tpyboard.com/support/studyexample14/206.html
导入需要的类库,编辑好main.py,直接运行就ok了,下面是main.py的程序源码
# main.py -- put your code here!
import pyb
import upcd8544
from machine import SPI,Pin
from ubinascii import hexlify
from ubinascii import *
from bmp180 import BMP180 bmp=BMP180(2)
SPI = pyb.SPI(1) #DIN=>X8-MOSI/CLK=>X6-SCK
#DIN =>SPI(1).MOSI 'X8' data flow (Master out, Slave in)
#CLK =>SPI(1).SCK 'X6' SPI clock
RST = pyb.Pin('X20')
CE = pyb.Pin('X19')
DC = pyb.Pin('X18')
LIGHT = pyb.Pin('X17')
lcd_5110 = upcd8544.PCD8544(SPI, RST, CE, DC, LIGHT) while True:
tem=bmp.getTemp()
press=bmp.getPress()
altitude=bmp.getAltitude()
lcd_5110.lcd_write_string('Tem:',0,0)
lcd_5110.lcd_write_string(str(tem),0,1)
lcd_5110.lcd_write_string('C',65,1)
lcd_5110.lcd_write_string('Press:',0,2)
lcd_5110.lcd_write_string(str(press),0,3)
lcd_5110.lcd_write_string('Pa',65,3)
lcd_5110.lcd_write_string('Hight:',0,4)
lcd_5110.lcd_write_string(str(altitude),0,5)
lcd_5110.lcd_write_string('M',65,5) bmp180.py库的源码 import pyb
from pyb import I2C BMP180_I2C_ADDR = const(0x77)
class BMP180():
def __init__(self, i2c_num):
self.i2c = I2C(i2c_num, I2C.MASTER, baudrate = 100000)
self.AC1 = self.short(self.get2Reg(0xAA))
self.AC2 = self.short(self.get2Reg(0xAC))
self.AC3 = self.short(self.get2Reg(0xAE))
self.AC4 = self.get2Reg(0xB0)
self.AC5 = self.get2Reg(0xB2)
self.AC6 = self.get2Reg(0xB4)
self.B1 = self.short(self.get2Reg(0xB6))
self.B2 = self.short(self.get2Reg(0xB8))
self.MB = self.short(self.get2Reg(0xBA))
self.MC = self.short(self.get2Reg(0xBC))
self.MD = self.short(self.get2Reg(0xBE))
self.UT = 0
self.UP = 0
self.B3 = 0
self.B4 = 0
self.B5 = 0
self.B6 = 0
self.B7 = 0
self.X1 = 0
self.X2 = 0
self.X3 = 0 def short(self, dat):
if dat > 32767:
return dat - 65536
else:
return dat def setReg(self, dat, reg):
buf = bytearray(2)
buf[0] = reg
buf[1] = dat
self.i2c.send(buf, BMP180_I2C_ADDR) def getReg(self, reg):
buf = bytearray(1)
buf[0] = reg
self.i2c.send(buf, BMP180_I2C_ADDR)
t = self.i2c.recv(1, BMP180_I2C_ADDR)
return t[0] def get2Reg(self, reg):
a = self.getReg(reg)
b = self.getReg(reg + 1)
return a*256 + b def measure(self):
self.setReg(0x2E, 0xF4)
pyb.delay(5)
self.UT = self.get2Reg(0xF6)
self.setReg(0x34, 0xF4)
pyb.delay(5)
self.UP = self.get2Reg(0xF6) def getTemp(self):
self.measure()
self.X1 = (self.UT - self.AC6) * self.AC5/(1<<15)
self.X2 = self.MC * (1<<11) / (self.X1 + self.MD)
self.B5 = self.X1 + self.X2
return (self.B5 + 8)/160 def getPress(self):
self.getTemp()
self.B6 = self.B5 - 4000
self.X1 = (self.B2 * (self.B6*self.B6/(1<<12))) / (1<<11)
self.X2 = (self.AC2 * self.B6)/(1<<11)
self.X3 = self.X1 + self.X2
self.B3 = ((self.AC1*4+self.X3) + 2)/4
self.X1 = self.AC3 * self.B6 / (1<<13)
self.X2 = (self.B1 * (self.B6*self.B6/(1<<12))) / (1<<16)
self.X3 = (self.X1 + self.X2 + 2)/4
self.B4 = self.AC4 * (self.X3 + 32768)/(1<<15)
self.B7 = (self.UP-self.B3) * 50000
if self.B7 < 0x80000000:
p = (self.B7*2)/self.B4
else:
p = (self.B7/self.B4) * 2
self.X1 = (p/(1<<8))*(p/(1<<8))
self.X1 = (self.X1 * 3038)/(1<<16)
self.X2 = (-7357*p)/(1<<16)
p = p + (self.X1 + self.X2 + 3791)/16
return p def getAltitude(self):
p = self.getPress()
return (44330*(1-(p/101325)**(1/5.255))) def get(self):
t = []
t.append(self.getPress())
t.append(self.getAltitude())
t.append(self.getTemp())
return t
MicroPython教程之TPYBoard开发板DIY小型家庭气象站的更多相关文章
- MicroPython教程之TPYBoard开发板DIY红外寻迹小车
智能小车现在差不多是电子竞赛或者DIY中的主流了,寻迹,壁障,遥控什么的,相信大家也都见得很多了,这次就大家探讨一下寻迹小车的制作方法,不同于以往的是这次的程序不用C语言写,而是要使用python语言 ...
- [MicroPython]TPYBoard开发板DIY小型家庭气象站
对于喜欢登山的人来说,都会非常关心自己所处的高度跟温度,海拔高度的测量方法,海拔测量一般常用的有两种方式,一是通过GPS全球定位系统,二是通过测出大气压,根据气压值算出海拔高度. BMP180是一直常 ...
- Micropython教程之TPYBoard开发板驱动舵机教程(萝卜学科编程教育)
大家应该都看到过机器人的手臂啊腿脚啊什么的一抽一抽的在动弹吧...是不是和机械舞一样的有节奏,现在很多机器人模型里面的动力器件都是舵机. 但是大家一般见到的动力器件都是像步进电机,直流电机这一类的动力 ...
- Micropython教程之TPYBoard制作蓝牙+红外循迹小车
1.实验目的 学习在PC机系统中扩展简单I/O接口的方法. 进一步学习编制数据输出程序的设计方法. 学习蓝牙模块的接线方法及其工作原理. 学习L298N电机驱动板模块的接线方法. 学习蓝牙控制小车的工 ...
- MicroPython教程之TPYBoard v102 CAN总线通信
0x00前言 CAN是控制器局域网络(ControllerAreaNetwork,CAN)的简称,是ISO国际标准化的串行通信协议.CAN总线结构简单,只需2根线与外部相连,并且内部集成了错误探测和管 ...
- MicroPython实例之TPYBoard开发板控制OLED显示中文
0x00 前言 之前看到一篇文章是关于TPYBoard v102控制OLED屏显示的,看到之后就想尝试一下使用OLED屏来显示中文.最近利用空余时间搞定了这个实验,特此将实验过程及源码分享出来,方便以 ...
- HealthKit开发快速入门教程之HealthKit开发概述简介
HealthKit开发快速入门教程之HealthKit开发概述简介 2014年6月2日召开的年度开发者大会上,苹果发布了一款新的移动应用平台,可以收集和分析用户的健康数据.该移动应用平台被命名为“He ...
- TPYBoard开发板搭建与阿里云服务发送数据
今天给大家带来的是TPYBoard V202开发板的一次测试项目使用心得.而测试项目就是给服务端发送硬件底层数据,而数据有产品名称,WF模块MAC地址,温湿度数据. 什么是MicroP ...
- Xamarin Anroid开发教程之Anroid开发工具及应用介绍
Xamarin Anroid开发教程之Anroid开发工具及应用介绍 Xamarin开发Anroid应用介绍 如今智能手机已经盛行了好几年,而针对这些智能手机的软件开发也变得异常火热.但是在Andro ...
随机推荐
- iscroll使用之页面卡顿问题
最近在开发项目时,遇到一个问题,使用iscroll实现的页面滚动,测试时发现在chrome浏览器中的模拟移动设备页面不能平滑滚动,有卡顿现象,在android手机端也有同样的问题. 在github上搜 ...
- Java开发小技巧(四):配置文件敏感信息处理
前言 不知道在上一篇文章中你有没有发现,jdbc.properties中的数据库密码配置是这样写的: jdbc.password=5EF28C5A9A0CE86C2D231A526ED5B388 其实 ...
- 修改 docker image 安装目录 (解决加载大image时报错:"no space left on device")
修改 docker image 安装目录 (解决加载大image时报错:"no space left on device" ) 基于Ubuntu16.04 docker版本: 17 ...
- Triangle LeetCode |My solution
Given a triangle, find the minimum path sum from top to bottom. Each step you may move to adjacent n ...
- STL之list容器的实现框架
说明:本文仅供学习交流,转载请标明出处.欢迎转载! list的底层採用数据结构是环形的双向链表. 相对于vector容器.list容器插入和删除操作付出的代价要比vector容器小得多,可是list带 ...
- Java深入 - MyBatis的经常用法
MyBatis我们这篇文章主要记录一些经常使用的操作方法.这样在开发和使用的过程中这篇文章能够当做工具书来使用. MyBatis的数据源配置 <bean id="dataSource& ...
- 微信小程序豆瓣电影项目的改造过程经验分享
在学习微信小程序开发过程中,一部分的难点是前端逻辑的处理,也就是对前端JS的代码编辑:一部分的难点是前端界面的设计展示:本篇随笔基于一个豆瓣电影接口的小程序开源项目进行重新调整,把其中遇到的相关难点和 ...
- Liunx的常用命令
常用指令 ls 显示文件或目录 -l 列出文件详细信息l(list) -a 列出当前目录下所有文件及目录,包括隐藏的a(all) mkdir 创建目录 -p 创建目录,若无父目录,则创建p(paren ...
- 【Web性能进阶】1.无线网络基础
一.无所不在的连接 针对不通的使用场景,无线网络技术有很多种. 鉴于无线网络技术如此多样,笼统地概括所有无线网络的性能优化手段是不可能的.好在大多数无线技术的原理都是相通的,衡量性能的指标和约束条件也 ...
- Python学习日记:day2
1.格式化输出 name = input("请输入你的名字:") age =input("请输入你的年龄:") job =input("请输入你的工作 ...