从零开始一起学习SLAM | 理解图优化,一步步带你看懂g2o代码
首发于公众号:计算机视觉life 旗下知识星球「从零开始学习SLAM」
这可能是最清晰讲解g2o代码框架的文章
理解图优化,一步步带你看懂g2o框架
小白:师兄师兄,最近我在看SLAM的优化算法,有种方法叫“图优化”,以前学习算法的时候还有一个优化方法叫“凸优化”,这两个不是一个东西吧?
师兄:哈哈,这个问题有意思,虽然它们中文发音一样,但是意思差别大着呢!我们来看看英文表达吧,图优化的英文是 graph optimization 或者 graph-based optimization,你看,它的“图”其实是数据结构中的graph。而凸优化的英文是 convex optimization,这里的“凸”其实是凸函数的意思,所以单从英文就能区分开它们。
小白:原来是这样,我看SLAM中图优化用的很多啊,我看了一下高博的书,还是迷迷糊糊的,求科普啊师兄
师兄:图优化真的蛮重要的,概念其实不负责,主要是编程稍微有点复杂。。
小白:不能同意更多。。,那个代码看的我一脸懵逼
图优化有什么优势?
师兄:按照惯例,我还是先说说图优化的背景吧。SLAM的后端一般分为两种处理方法,一种是以扩展卡尔曼滤波(EKF)为代表的滤波方法,一种是以图优化为代表的非线性优化方法。不过,目前SLAM研究的主流热点几乎都是基于图优化的。
小白:据我所知,滤波方法很早就有了,前人的研究也很深。为什么现在图优化变成了主流了?
师兄:你说的没错。滤波方法尤其是EKF方法,在SLAM发展很长的一段历史中一直占据主导地位,早期的大神们研究了各种各样的滤波器来改善滤波效果,那会入门SLAM,EKF是必须要掌握的。顺便总结下滤波方法的优缺点:
优点:在当时计算资源受限、待估计量比较简单的情况下,EKF为代表的滤波方法比较有效,经常用在激光SLAM中。
缺点:它的一个大缺点就是存储量和状态量是平方增长关系,因为存储的是协方差矩阵,因此不适合大型场景。而现在基于视觉的SLAM方案,路标点(特征点)数据很大,滤波方法根本吃不消,所以此时滤波的方法效率非常低。
小白:原来如此。那图优化在视觉SLAM中效率很高吗?
师兄:这个其实说来话长了。很久很久以前,其实就是不到十年前吧(感觉好像很久),大家还都是用滤波方法,因为在图优化里,Bundle Adjustment(后面简称BA)起到了核心作用。但是那会SLAM的研究者们发现包含大量特征点和相机位姿的BA计算量其实很大,根本没办法实时。
小白:啊?后来发生了什么?(认真听故事ing)
师兄:后来SLAM研究者们发现了其实在视觉SLAM中,虽然包含大量特征点和相机位姿,但其实BA是稀疏的,稀疏的就好办了,就可以加速了啊!比较代表性的就是2009年,几个大神发表了自己的研究成果《SBA:A software package for generic sparse bundle adjustment》,而且计算机硬件发展也很快,因此基于图优化的视觉SLAM也可以实时了!
小白:厉害厉害!向大牛们致敬!
图优化是什么?
小白:图优化既然是主流,那我可以跳过滤波方法直接学习图优化吧,反正滤波方法也看不懂。。
师兄:额,图优化确实是主流,以后有需要你可以再去看滤波方法,那我们今天就只讲图优化好啦
小白:好滴,那问题来了,究竟什么是图优化啊?
师兄:图优化里的图就是数据结构里的图,一个图由若干个顶点(vertex),以及连接这些顶点的边(edge)组成,给你举个例子
比如一个机器人在房屋里移动,它在某个时刻 t 的位姿(pose)就是一个顶点,这个也是待优化的变量。而位姿之间的关系就构成了一个边,比如时刻 t 和时刻 t+1 之间的相对位姿变换矩阵就是边,边通常表示误差项。
在SLAM里,图优化一般分解为两个任务:
1、构建图。机器人位姿作为顶点,位姿间关系作为边。
2、优化图。调整机器人的位姿(顶点)来尽量满足边的约束,使得误差最小。
下面就是一个直观的例子。我们根据机器人位姿来作为图的顶点,这个位姿可以来自机器人的编码器,也可以是ICP匹配得到的,图的边就是位姿之间的关系。由于误差的存在,实际上机器人建立的地图是不准的,如下图左。我们通过设置边的约束,使得图优化向着满足边约束的方向优化,最后得到了一个优化后的地图(如下图中所示),它和真正的地图(下图右)非常接近。
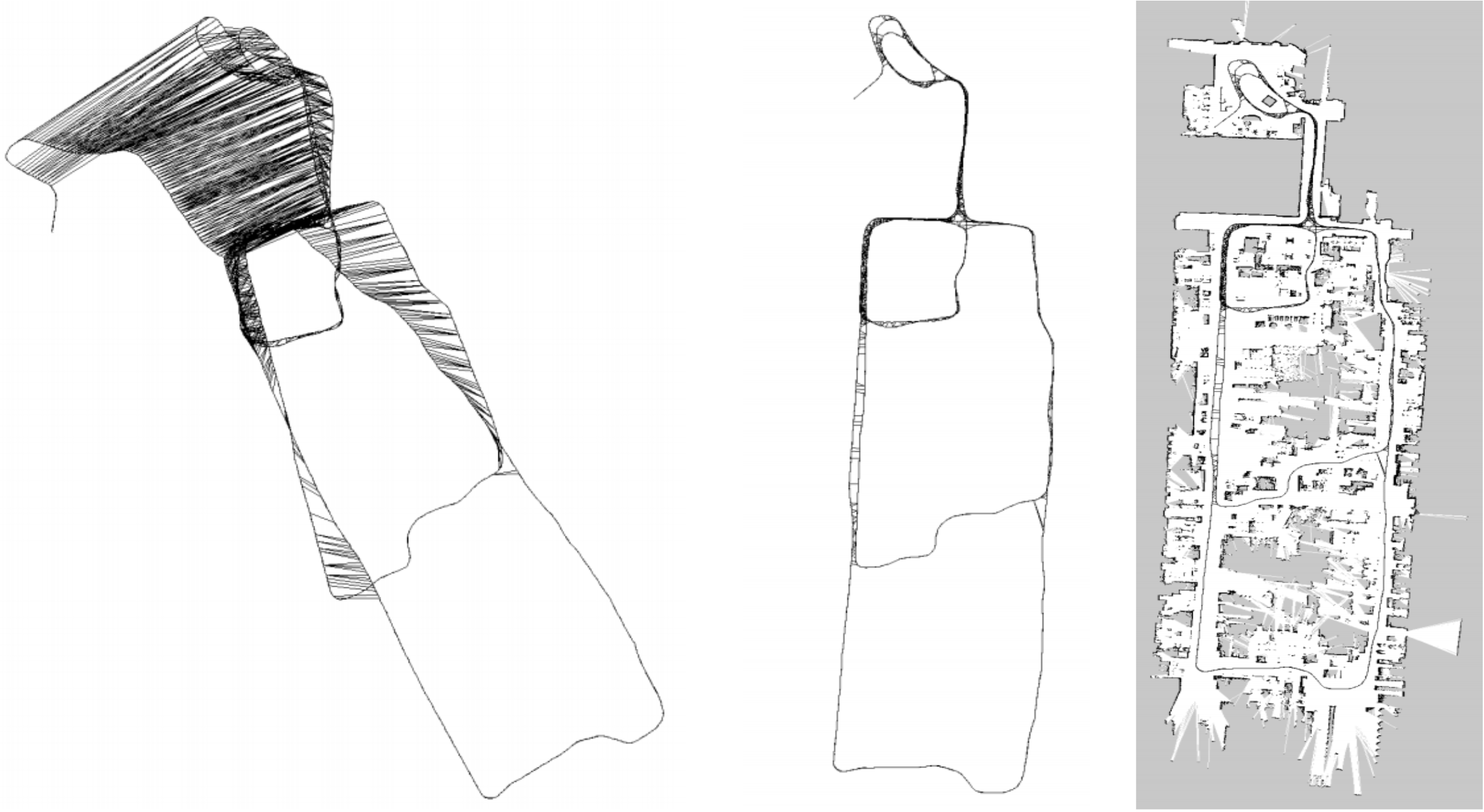
小白:哇塞,这个图优化效果这么明显啊!刚开始误差那么大,最后都校正过来了
师兄:是啊,所以图优化在SLAM中举足轻重啊,一定得掌握!
小白:好,有学习的动力了!我们开启编程模式吧!
先了解g2o 框架
师兄:前面我们简单介绍了图优化,你也看到了它的神通广大,那如何编程实现呢?
小白:对啊,有没有现成的库啊,我还只是个“调包侠”。。
师兄:这个必须有啊!在SLAM领域,基于图优化的一个用的非常广泛的库就是g2o,它是General Graphic Optimization 的简称,是一个用来优化非线性误差函数的c++框架。这个库可以满足你调包侠的梦想~

小白:哈哈,太好了,否则打死我也写不出来啊!那这个g2o怎么用呢?
师兄:我先说安装吧,其实g2o安装很简单,参考GitHub上官网:
https://github.com/RainerKuemmerle/g2o
按照步骤来安装就行了。需要注意的是安装之前确保电脑上已经安装好了第三方依赖。
小白:好的,这个看起来很好装。不过问题是,我看相关的代码,感觉很复杂啊,不知如何下手啊
师兄:别急,第一次接触g2o,确实有这种感觉,而且官网文档写的也比较“不通俗不易懂”,不过如果你能捋顺了它的框架,再去看代码,应该很快能够入手了
小白:是的,先对框架了然于胸才行,不然即使能凑合看懂别人代码,自己也不会写啊!
师兄:嗯嗯,其实g2o帮助我们实现了很多内部的算法,只是在进行构造的时候,需要遵循一些规则,在我看来这是可以接受的,毕竟一个程序不可能满足所有的要求,因此在以后g2o的使用中还是应该多看多记,这样才能更好的使用这个库。
小白:记住了。养成记笔记的好习惯,还要多练习。
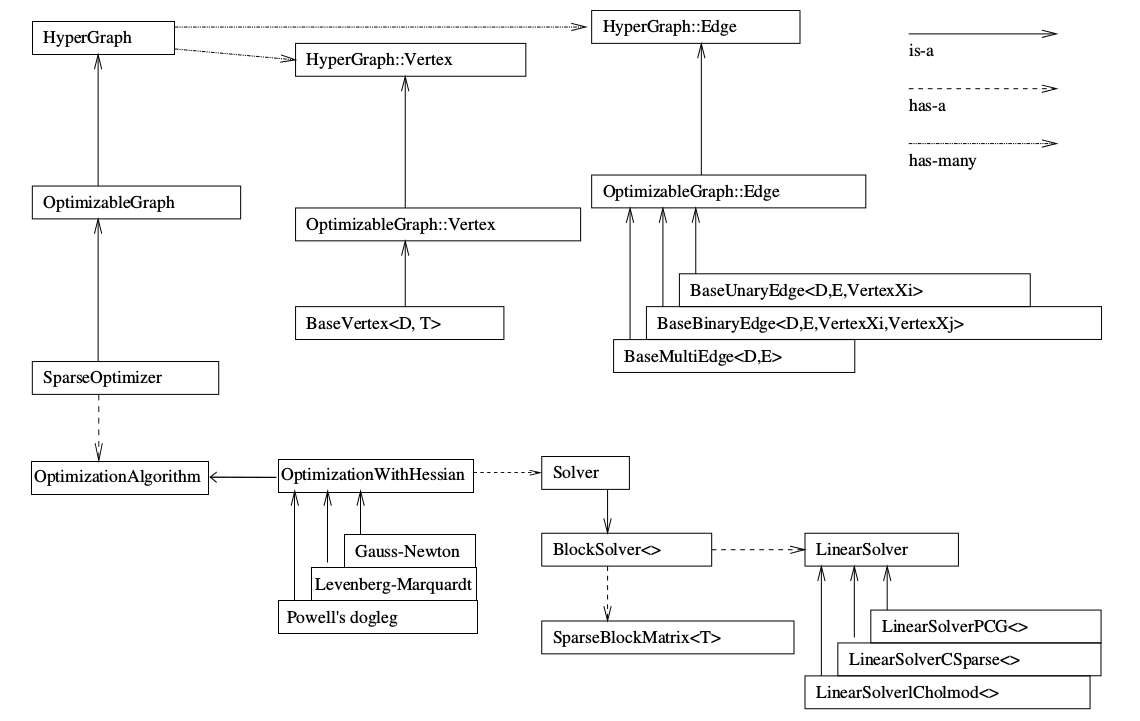
师兄:好,那我们首先看一下下面这个图,是g2o的基本框架结构。如果你查资料的话,你会在很多地方都能看到。看图的时候要注意箭头类型
1、图的核心
小白:师兄,这个图该从哪里开始看?感觉好多东西。。
师兄:如果你想要知道这个图中哪个最重要,就去看看箭头源头在哪里
小白:我看看。。。好像是最左侧的SparseOptimizer?
师兄:对的,SparseOptimizer是整个图的核心,我们注意右上角的 is-a 实心箭头,这个SparseOptimizer它是一个Optimizable Graph,从而也是一个超图(HyperGraph)。
小白:我去,师兄,怎么突然冒出来这么多奇怪的术语,都啥意思啊?
师兄:这个你不需要一个个弄懂,不然可能黄花菜都凉了。你先暂时只需要了解一下它们的名字,有些以后用不到,有些以后用到了再回看。目前如果遇到重要的我会具体解释。
小白:好。那下一步看哪里?
2、顶点和边
师兄:我们先来看上面的结构吧。注意看 has-many 箭头,你看这个超图包含了许多顶点(HyperGraph::Vertex)和边(HyperGraph::Edge)。而这些顶点顶点继承自 Base Vertex,也就是OptimizableGraph::Vertex,而边可以继承自 BaseUnaryEdge(单边), BaseBinaryEdge(双边)或BaseMultiEdge(多边),它们都叫做OptimizableGraph::Edge
小白:头有点晕了,师兄
师兄:哈哈,不用一个个记,现阶段了解这些就行。顶点和边在编程中很重要的,关于顶点和边的定义我们以后会详细说的。下面我们来看底部的结构。
小白:嗯嗯,知道啦!
3、配置SparseOptimizer的优化算法和求解器
师兄:你看下面,整个图的核心SparseOptimizer 包含一个优化算法(OptimizationAlgorithm)的对象。OptimizationAlgorithm是通过OptimizationWithHessian 来实现的。其中迭代策略可以从Gauss-Newton(高斯牛顿法,简称GN), Levernberg-Marquardt(简称LM法), Powell's dogleg 三者中间选择一个(我们常用的是GN和LM)
小白:GN和LM就是我们以前讲过的非线性优化方法中常用的两种吧
师兄:是的,如果不了解的话具体看《从零开始学习「张氏相机标定法」(四)优化算法前传》《从零开始学习「张氏相机标定法」(五)优化算法正传》这两篇文章。
4、如何求解
师兄:那么如何求解呢?OptimizationWithHessian 内部包含一个求解器(Solver),这个Solver实际是由一个BlockSolver组成的。这个BlockSolver有两个部分,一个是SparseBlockMatrix ,用于计算稀疏的雅可比和Hessian矩阵;一个是线性方程的求解器(LinearSolver),它用于计算迭代过程中最关键的一步HΔx=−b,LinearSolver有几种方法可以选择:PCG, CSparse, Choldmod,具体定义后面会介绍
到此,就是上面图的一个简单理解。
一步步带你看懂g2o编程流程
小白:师兄,看完了我也不知道编程时具体怎么编呢!
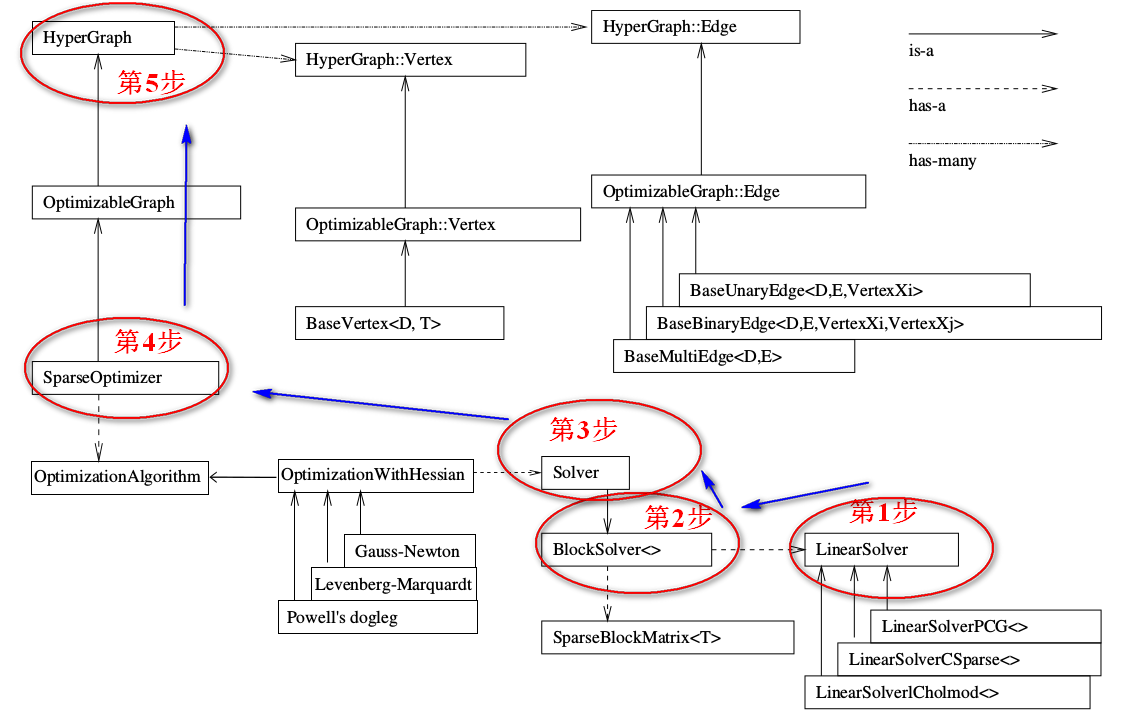
师兄:我正好要说这个。首先这里需要说一下,我们梳理是从顶层到底层,但是编程实现时需要反过来,像建房子一样,从底层开始搭建框架一直到顶层。g2o的整个框架就是按照下图中我标的这个顺序来写的。
高博在十四讲中g2o求解曲线参数的例子来说明,源代码地址
https://github.com/gaoxiang12/slambook/edit/master/ch6/g2o_curve_fitting/main.cpp
为了方便理解,我重新加了注释。如下所示,
typedef g2o::BlockSolver< g2o::BlockSolverTraits<3,1> > Block; // 每个误差项优化变量维度为3,误差值维度为1
// 第1步:创建一个线性求解器LinearSolver
Block::LinearSolverType* linearSolver = new g2o::LinearSolverDense<Block::PoseMatrixType>();
// 第2步:创建BlockSolver。并用上面定义的线性求解器初始化
Block* solver_ptr = new Block( linearSolver );
// 第3步:创建总求解器solver。并从GN, LM, DogLeg 中选一个,再用上述块求解器BlockSolver初始化
g2o::OptimizationAlgorithmLevenberg* solver = new g2o::OptimizationAlgorithmLevenberg( solver_ptr );
// 第4步:创建终极大boss 稀疏优化器(SparseOptimizer)
g2o::SparseOptimizer optimizer; // 图模型
optimizer.setAlgorithm( solver ); // 设置求解器
optimizer.setVerbose( true ); // 打开调试输出
// 第5步:定义图的顶点和边。并添加到SparseOptimizer中
CurveFittingVertex* v = new CurveFittingVertex(); //往图中增加顶点
v->setEstimate( Eigen::Vector3d(0,0,0) );
v->setId(0);
optimizer.addVertex( v );
for ( int i=0; i<N; i++ ) // 往图中增加边
{
CurveFittingEdge* edge = new CurveFittingEdge( x_data[i] );
edge->setId(i);
edge->setVertex( 0, v ); // 设置连接的顶点
edge->setMeasurement( y_data[i] ); // 观测数值
edge->setInformation( Eigen::Matrix<double,1,1>::Identity()*1/(w_sigma*w_sigma) ); // 信息矩阵:协方差矩阵之逆
optimizer.addEdge( edge );
}
// 第6步:设置优化参数,开始执行优化
optimizer.initializeOptimization();
optimizer.optimize(100);
结合上面的流程图和代码。下面一步步解释具体步骤。
1、创建一个线性求解器LinearSolver
我们要求的增量方程的形式是:H△X=-b,通常情况下想到的方法就是直接求逆,也就是△X=-H.inv*b。看起来好像很简单,但这有个前提,就是H的维度较小,此时只需要矩阵的求逆就能解决问题。但是当H的维度较大时,矩阵求逆变得很困难,求解问题也变得很复杂。
小白:那有什么办法吗?
师兄:办法肯定是有的。此时我们就需要一些特殊的方法对矩阵进行求逆,你看下图是GitHub上g2o相关部分的代码
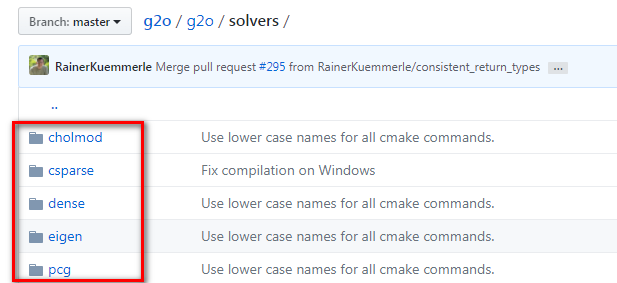
如果你点进去看,可以分别查看每个方法的解释,如果不想挨个点进去看,看看下面我的总结就行了
LinearSolverCholmod :使用sparse cholesky分解法。继承自LinearSolverCCS
LinearSolverCSparse:使用CSparse法。继承自LinearSolverCCS
LinearSolverPCG :使用preconditioned conjugate gradient 法,继承自LinearSolver
LinearSolverDense :使用dense cholesky分解法。继承自LinearSolver
LinearSolverEigen: 依赖项只有eigen,使用eigen中sparse Cholesky 求解,因此编译好后可以方便的在其他地方使用,性能和CSparse差不多。继承自LinearSolver
2、创建BlockSolver。并用上面定义的线性求解器初始化。
BlockSolver 内部包含 LinearSolver,用上面我们定义的线性求解器LinearSolver来初始化。它的定义在如下文件夹内:
你点进去会发现 BlockSolver有两种定义方式
一种是指定的固定变量的solver,我们来看一下定义
using BlockSolverPL = BlockSolver< BlockSolverTraits<p, l> >;
其中p代表pose的维度(注意一定是流形manifold下的最小表示),l表示landmark的维度
另一种是可变尺寸的solver,定义如下
using BlockSolverX = BlockSolverPL<Eigen::Dynamic, Eigen::Dynamic>;
小白:为何会有可变尺寸的solver呢?
师兄:这是因为在某些应用场景,我们的Pose和Landmark在程序开始时并不能确定,那么此时这个块状求解器就没办法固定变量,此时使用这个可变尺寸的solver,所有的参数都在中间过程中被确定
另外你看block_solver.h的最后,预定义了比较常用的几种类型,如下所示:
BlockSolver_6_3 :表示pose 是6维,观测点是3维。用于3D SLAM中的BA
BlockSolver_7_3:在BlockSolver_6_3 的基础上多了一个scale
BlockSolver_3_2:表示pose 是3维,观测点是2维
以后遇到了知道这些数字是什么意思就行了
3、创建总求解器solver。并从GN, LM, DogLeg 中选一个,再用上述块求解器BlockSolver初始化
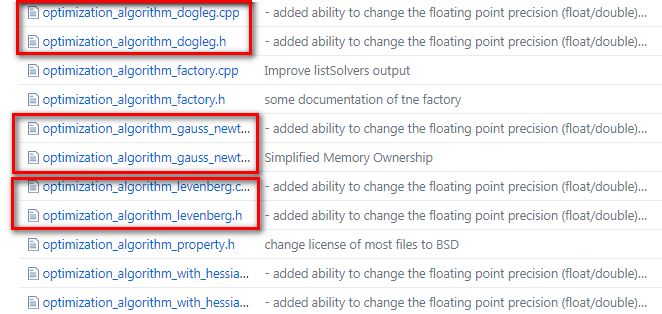
我们来看g2o/g2o/core/ 目录下,发现Solver的优化方法有三种:分别是高斯牛顿(GaussNewton)法,LM(Levenberg–Marquardt)法、Dogleg法,如下图所示,也和前面的图相匹配
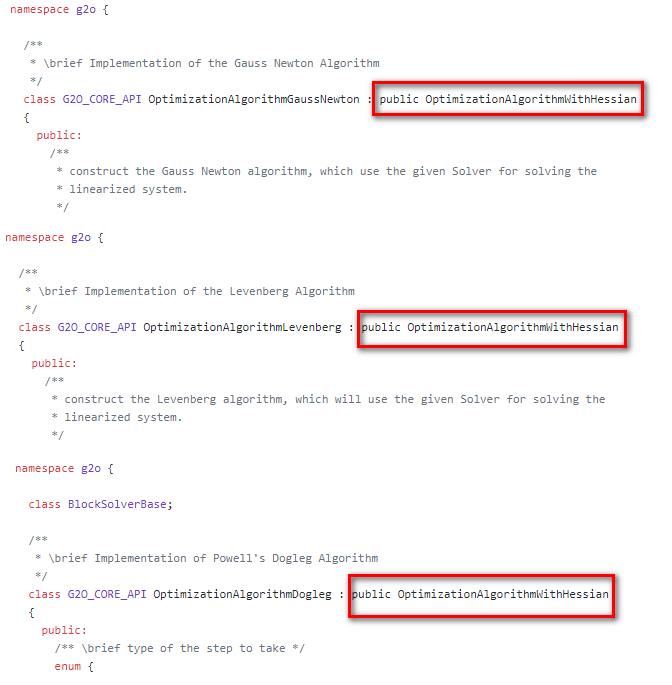
小白:师兄,上图最后那个OptimizationAlgorithmWithHessian 是干嘛的?
师兄:你点进去 GN、 LM、 Doglet算法内部,会发现他们都继承自同一个类:OptimizationWithHessian,如下图所示,这也和我们最前面那个图是相符的
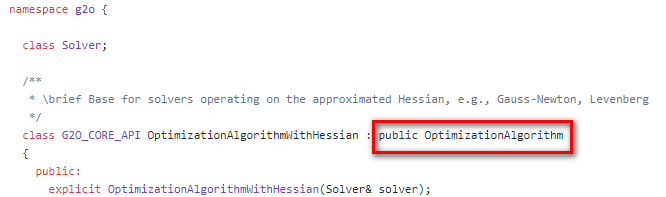
然后,我们点进去看 OptimizationAlgorithmWithHessian,发现它又继承自OptimizationAlgorithm,这也和前面的相符
总之,在该阶段,我们可以选则三种方法:
g2o::OptimizationAlgorithmGaussNewton
g2o::OptimizationAlgorithmLevenberg
g2o::OptimizationAlgorithmDogleg
4、创建终极大boss 稀疏优化器(SparseOptimizer),并用已定义求解器作为求解方法。
创建稀疏优化器
g2o::SparseOptimizer optimizer;
用前面定义好的求解器作为求解方法:
SparseOptimizer::setAlgorithm(OptimizationAlgorithm* algorithm)
其中setVerbose是设置优化过程输出信息用的
SparseOptimizer::setVerbose(bool verbose)
不信我们来看一下它的定义
5、定义图的顶点和边。并添加到SparseOptimizer中。
这部分比较复杂,我们下一次再介绍。
6、设置优化参数,开始执行优化。
设置SparseOptimizer的初始化、迭代次数、保存结果等。
初始化
SparseOptimizer::initializeOptimization(HyperGraph::EdgeSet& eset)
设置迭代次数,然后就开始执行图优化了。
SparseOptimizer::optimize(int iterations, bool online)
小白:终于搞明白g2o流程了!谢谢师兄!必须给你个「好看」啊!
注:以上内容部分参考了如下文章,感谢原作者:
https://www.jianshu.com/p/e16ffb5b265d
https://blog.csdn.net/heyijia0327/article/details/47686523
讨论
我们知道(不知道的话,去查一下十四讲)用g2o和ceres库都能用来进行BA优化,这两者在使用过程中有什么不同?
欢迎留言讨论,更多学习视频、文档资料、参考答案等关注计算机视觉life公众号,,菜单栏点击“知识星球”查看「从零开始学习SLAM」星球介绍,快来和其他小伙伴一起学习交流~

推荐阅读
从零开始一起学习SLAM | 为什么要学SLAM?
从零开始一起学习SLAM | 学习SLAM到底需要学什么?
从零开始一起学习SLAM | SLAM有什么用?
从零开始一起学习SLAM | C++新特性要不要学?
从零开始一起学习SLAM | 为什么要用齐次坐标?
从零开始一起学习SLAM | 三维空间刚体的旋转
从零开始一起学习SLAM | 为啥需要李群与李代数?
从零开始一起学习SLAM | 相机成像模型
从零开始一起学习SLAM | 不推公式,如何真正理解对极约束?
从零开始一起学习SLAM | 神奇的单应矩阵
从零开始一起学习SLAM | 你好,点云
从零开始一起学习SLAM | 给点云加个滤网
从零开始一起学习SLAM | 点云平滑法线估计
零基础小白,如何入门计算机视觉?
SLAM领域牛人、牛实验室、牛研究成果梳理
我用MATLAB撸了一个2D LiDAR SLAM
可视化理解四元数,愿你不再掉头发
最近一年语义SLAM有哪些代表性工作?
视觉SLAM技术综述
从零开始一起学习SLAM | 理解图优化,一步步带你看懂g2o代码的更多相关文章
- 从零开始一起学习SLAM | 掌握g2o边的代码套路
点"计算机视觉life"关注,置顶更快接收消息! 小白:师兄,g2o框架<从零开始一起学习SLAM | 理解图优化,一步步带你看懂g2o代码>,以及顶点<从零开始 ...
- 从零开始一起学习SLAM | 掌握g2o顶点编程套路
点"计算机视觉life"关注,置顶更快接收消息! ## 小白:师兄,上一次将的g2o框架<从零开始一起学习SLAM | 理解图优化,一步步带你看懂g2o代码>真的很清晰 ...
- 从零开始一起学习SLAM | 用四元数插值来对齐IMU和图像帧
视觉 Vs. IMU 小白:师兄,好久没见到你了啊,我最近在看IMU(Inertial Measurement Unit,惯性导航单元)相关的东西,正好有问题求助啊 师兄:又遇到啥问题啦? 小白:是这 ...
- 从零开始一起学习SLAM | 不推公式,如何真正理解对极约束?
自从小白向师兄学习了李群李代数和相机成像模型的基本原理后,感觉书上的内容没那么难了,公式推导也能推得动了,感觉进步神速,不过最近小白在学习对极几何,貌似又遇到了麻烦... 小白:师兄,对极几何这块你觉 ...
- 从零开始一起学习SLAM | 为啥需要李群与李代数?
很多刚刚接触SLAM的小伙伴在看到李群和李代数这部分的时候,都有点蒙蒙哒,感觉突然到了另外一个世界,很多都不自觉的跳过了,但是这里必须强调一点,这部分在后续SLAM的学习中其实是非常重要的基础,不信你 ...
- 从零开始一起学习SLAM | 学习SLAM到底需要学什么?
SLAM涉及的知识面很广,我简单总结了 “SLAM知识树” 如下所示: (公众号菜单栏回复 “树” 可获得清晰版) 可以看到涉及的知识面还是比较广的.这里放出一张SLAM圈子里喜闻乐见的表达悲喜交加心 ...
- 从零开始一起学习SLAM | 点云平滑法线估计
点击公众号"计算机视觉life"关注,置顶星标更快接收消息! 本文编程练习框架及数据获取方法见文末获取方式 菜单栏点击"知识星球"查看「从零开始学习SLAM」一 ...
- 从零开始一起学习SLAM | 给点云加个滤网
对VSLAM和三维重建感兴趣的在计算机视觉life"公众号菜单栏回复"三维视觉"进交流群. 小白:师兄,上次你讲了点云拼接后,我回去费了不少时间研究,终于得到了和你给的参 ...
- 从零开始一起学习SLAM | 为什么要学SLAM?
在<零基础小白,如何入门计算机视觉?>中我提到过,计算机视觉的研究目前主要分为两大方向:基于学习的方法和基于几何的方法.其中基于学习的方法最火的就是深度学习,而基于几何方法最火的就是视觉S ...
随机推荐
- Linux下用gSOAP开发Web Service服务端和客户端程序
网上本有一篇流传甚广的C版本的,我参考来实现,发现有不少问题,现在根据自己的开发经验将其修改,使用无误:另外,补充同样功能的C++版本,我想这个应该更有用,因为能用C++,当然好过受限于C. 1.gS ...
- MySQL server has gone away
场景: 批量写入数据时,MySQL server has gone away 解决方法: 在 my.ini 中 将 max_allowed_packet 参数设置大一点 show global va ...
- netty 的 Google protobuf 开发
根据上一篇博文 Google Protobuf 使用 Java 版 netty 集成 protobuf 的方法非常简单.代码如下: server package protobuf.server.imp ...
- exists oracle 的用法
CREATE TABLE `A` ( `id` ) NOT NULL AUTO_INCREMENT, `name` ) DEFAULT NULL, PRIMARY KEY (`id`) ) ENGIN ...
- iOS - 跳转到系统设置
一.跳转到自己应用设置(iOS8以上系统推荐使用) //跳转到自己应用干的设置配置页(如 定位.相机.相册 这些隐私配置) [[UIApplication sharedApplication] ope ...
- 【面试题】java面试题整理(有空再贴答案)
面试题+基础 各家的面试题其实都大同小异, 掌握基础和原理,走到哪都不怕. 基础 leetcode上有一些总结,star数非常高了.贴上url https://github.com/CyC2018/C ...
- win10 快速访问关闭
1. 右键 --- 选项 2. 选择:此电脑
- windows安装mysql8
1:首先去官网下载安装包 下载地址:https://dev.mysql.com/downloads/mysql/ 2:将解压文件解压到你安装的目录:E:\mysql-8.0.11-winx64 (我 ...
- Nestjs 增加全局前缀
文档 const app = await NestFactory.create(AppModule); app.setGlobalPrefix('v1'); // http://localhost:5 ...
- mybatis11--多对多关联查询
多对多关联! 其实就是两个一对多的关联! 比如说 一个学生可以有多个老师!一个老师可以有多个学生! 那么 学生和老师之间的关系 可以理解为 多对多的关联关系! 关键是怎么建立数据库中两个表之间的关系 ...