【PyTorch】常用的神经网络层汇总(持续补充更新)
1. Convolution Layers
1.1 nn.Conv2d
(1)原型
torch.nn.Conv2d(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True,
padding_mode='zeros', device=None, dtype=None)
在由多个输入平面组成的输入信号上应用2D卷积,简言之就是在多通道输入图像上进行卷积操作。
(2)参数
- in_channels (int) — 输入图像的通道数
- out_channels (int) — 输出图像(张量表示)的通道数
- kernel_size (int or tuple) — 卷积核大小。n*n型的写成 kernel_size = 5 即可,n*m型的则需要写成 kernel_size = (n, m)
- stride (int or tuple, 可选择) — 卷积步长,即卷积核在图像上每次平移的间隔。默认:1
- padding (int, tuple or str, 可选择) — 边缘填充,图像上下左右四边填充为 0 的行数和列数。默认:0
- padding_mode (string, 可选择) — padding的模式:'zeros',’reflect','replicata' 或 'circular'。默认:'zeros'
- dilation (int or tuple, 可选择) — 内核元素的间隔,该参数决定了是否采用空洞卷积。默认:1(不采用)
- groups (int, 可选择) — 输入通道到输出通道之间块状连接的数量。默认:1
- bias (bool, 可选择) — 是否增加一个可学习的偏置项到输出。默认:True
(3)属性
- ~Linear.weight (torch.Tensor) — 形状为 (out_channels, in_channels / group, kernel_size[0], kernel_size[1]) 的模型的可学习的偏置项
初始化为:

- ~Linear.bias — 形状为 (out_channels) 的模型的可学习的偏置项
如果bias为True,初始化为:

(4)用法示例
import torch
import torch.nn as nn m = nn.Conv2d(16, 33, (3, 5), stride=(2, 1), padding=(4, 2), dilation=(3, 1))
print(m)
# (N, C, H, W)
inputImage = torch.randn(20, 16, 50, 100)
output = m(inputImage)
print(output.shape)
结果:

2. Pooling Layers
2.1 nn.MaxPool2d
(1)原型
torch.nn.MaxPool2d(kernel_size, stride=None, padding=0, dilation=1, return_indices=False, ceil_mode=False)
在由多个输入平面组成的输入信号上应用 2D 最大池化。
注:当 ceil_mode=True 时,如果滑动窗口从左侧填充或输入中开始,则允许它们越界。在右侧填充区域开始的滑动窗口将被忽略。
(2)参数
kernel_size — 表示做最大池化的窗口大小,可以是单个值,也可以是tuple元组
stride — 卷积步长,即卷积核在图像上每次平移的间隔。 默认:kernel_size
padding — 图像上下左右四边填充为 0 的行数和列数。默认:0
dilation — 内核元素的间隔,该参数决定了是否采用空洞卷积。默认:1(不采用)
return_indices (bool) — 是否返回输出的最大索引。默认:False
ceil_mode (bool) — 使用向上取整(ceil)或向下取整(floor)的方式计算得到输出形状。默认:False(floor,向下取整)
(3)用法示例
# pool of square window of size=3, stride=2
m = nn.MaxPool2d(3, stride=2)
# pool of non-square window
m = nn.MaxPool2d((3, 2), stride=(2, 1))
input = torch.randn(20, 16, 50, 32)
output = m(input)
print(f'input shape: {input.shape}', f'output shape: {output.shape}', sep='\n')
结果:

2.2 nn.AvgPool2d
(1)原型
torch.nn.AvgPool2d(kernel_size, stride=None, padding=0, ceil_mode=False, count_include_pad=True, divisor_override=None)
在由多个输入平面组成的输入信号上应用 2D 平均池化。
注:当 ceil_mode=True 时,如果滑动窗口从左侧填充或输入中开始,则允许它们越界。在右侧填充区域开始的滑动窗口将被忽略。
(2)参数
kernel_size — 表示做最大池化的窗口大小,可以是单个值,也可以是tuple元组
stride — 卷积步长,即卷积核在图像上每次平移的间隔。 默认:kernel_size
padding — 图像上下左右四边填充为 0 的行数和列数。默认:0
ceil_mode — 使用向上取整(ceil)或向下取整(floor)的方式计算得到输出形状。默认:False(floor,向下取整)
count_include_pad — 是否在平均计算中包含零填充。默认:True
divisor_override — 如果指定,它将用作除数,否则将使用池化区域的大小
(3)用法示例
# pool of square window of size=3, stride=2
m = nn.AvgPool2d(3, stride=2)
# pool of non-square window
m = nn.AvgPool2d((3, 2), stride=(2, 1))
input = torch.randn(20, 16, 50, 32)
output = m(input)
print(f'\ninput shape: {input.shape}', f'output shape: {output.shape}', sep='\n')
2.3 AdaptiveMaxPool2d
(1)原型
torch.nn.AdaptiveMaxPool2d(output_size, return_indices=False)
在由多个输入平面组成的输入信号上应用 2D 自适应最大池化。
对于任何输入大小,输出大小为 Hout * Wout,输出特征的数量等于输入平面的数量。
(2)参数
output_size — 目标输出为形如 Hout * Wout 的图像。可能是一个数组 (Hout, Wout) 或者方形图像 Hout * Hout 的单项 Hout 。Hout 和 Wout 可以是 int,也可以是 None,这意味着大小将与输入的大小相同
return_indices — 是否返回输出的最大索引。默认:False
(3)用法
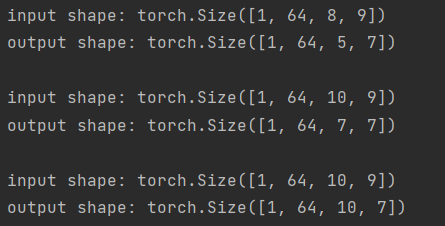
# target output size of 5x7
m = nn.AdaptiveMaxPool2d((5, 7))
input = torch.randn(1, 64, 8, 9)
output = m(input)
print(f'input shape: {input.shape}', f'output shape: {output.shape}', sep='\n')
# target output size of 7x7 (square)
m = nn.AdaptiveMaxPool2d(7)
input = torch.randn(1, 64, 10, 9)
output = m(input)
print(f'\ninput shape: {input.shape}', f'output shape: {output.shape}', sep='\n')
# target output size of 10x7
m = nn.AdaptiveMaxPool2d((None, 7))
input = torch.randn(1, 64, 10, 9)
output = m(input)
print(f'\ninput shape: {input.shape}', f'output shape: {output.shape}', sep='\n')
结果:
2.4 AdaptiveAvgPool2d
(1)原型
torch.nn.AdaptiveAvgPool2d(output_size)
在由多个输入平面组成的输入信号上应用 2D 自适应平均池化。
对于任何输入大小,输出大小为 H x W。 输出特征的数量等于输入平面的数量。
(2)参数
- output_size – 目标输出为形如 H * W 的图像。可能是一个数组 (H, W) 或者方形图像 H * H 的单项 H 。H 和 W 可以是 int,也可以是 None,这意味着大小将与输入的大小相同
(3)用法
# target output size of 5x7
m = nn.AdaptiveAvgPool2d((5, 7))
input = torch.randn(1, 64, 8, 9)
output = m(input)
print(f'input shape: {input.shape}', f'output shape: {output.shape}', sep='\n')
# target output size of 7x7 (square)
m = nn.AdaptiveAvgPool2d(7)
input = torch.randn(1, 64, 10, 9)
output = m(input)
print(f'\ninput shape: {input.shape}', f'output shape: {output.shape}', sep='\n')
# target output size of 10x7
m = nn.AdaptiveAvgPool2d((None, 7))
input = torch.randn(1, 64, 10, 9)
output = m(input)
print(f'\ninput shape: {input.shape}', f'output shape: {output.shape}', sep='\n')
3. Non-linear Activations (weighted sum, nonlinearity)
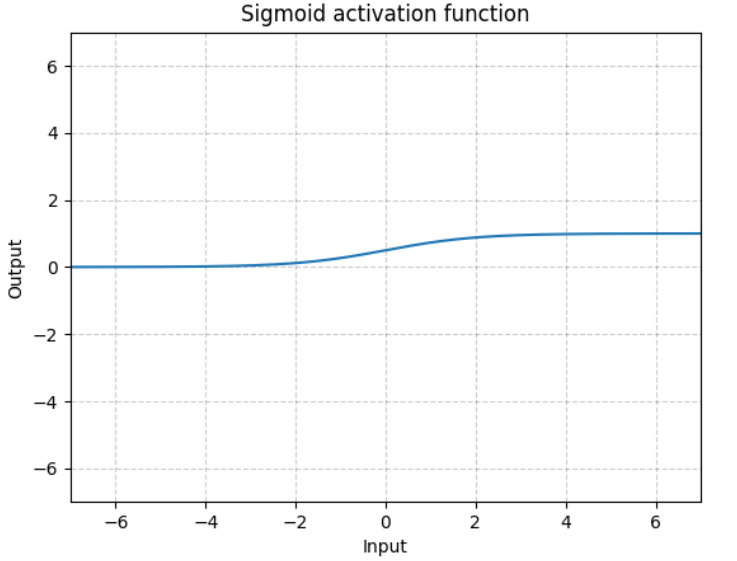
3.1 nn.Sigmoid
(1)原型
torch.nn.Sigmoid()
(2)Sigmoid函数表达式及图像
逐元素执行:

(3)用法示例
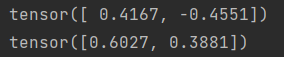
m = nn.Sigmoid()
input = torch.randn(2)
print(input)
output = m(input)
print(output)
结果:
3.2 nn.Tanh
(1)原型
torch.nn.Tanh()
(2)Tanh函数表达式及图像
逐元素执行:


(3)用法示例
m = nn.Tanh()
input = torch.randn(2)
print(input)
output = m(input)
print(output)
结果:

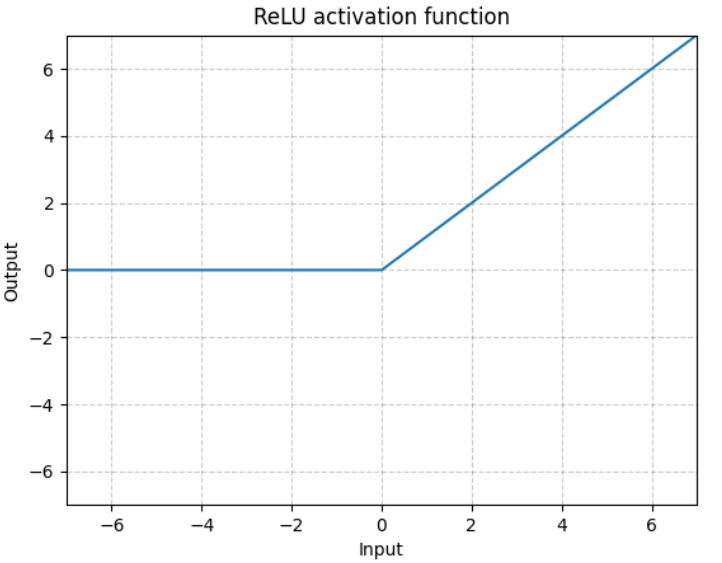
3.3 nn.ReLU
(1)原型
torch.nn.ReLU(inplace=False)
(2)ReLU函数表达式及图像
逐元素执行:

(3)参数
- inplace — 选择是否就地执行操作,即是否对Input本身执行该操作。若为True,则对Input执行ReLU的同时也会改变(或刷新)Input的值,使得Input=Output;若为False,则不会改变Input的值。默认:False
(4)用法示例
m = nn.ReLU()
input = torch.randn(2)
output = m(input) # An implementation of CReLU - https://arxiv.org/abs/1603.05201
m = nn.ReLU()
input = torch.randn(2).unsqueeze(0)
output = torch.cat((m(input),m(-input)))
结果:
3.4 nn.LeakyReLU
(1)定义
torch.nn.LeakyReLU(negative_slope=0.01, inplace=False)
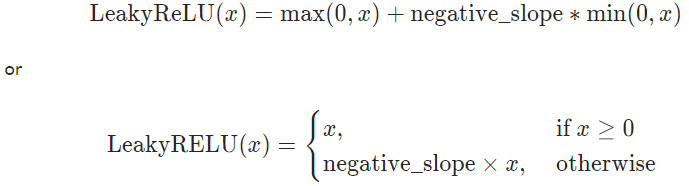
(2)LeakyReLU函数表达式和图像
逐元素执行:

(3)参数
negative_slope — Input的负数部分的斜率。默认:1e-2
inplace — 选择是否就地执行操作,即是否对Input本身执行该操作。若为True,则对Input执行ReLU的同时也会改变(或刷新)Input的值,使得Input=Output;若为False,则不会改变Input的值。默认:False
(4)用法示例
m = nn.LeakyReLU(0.1)
input = torch.randn(2)
print(input)
output = m(input)
print(output)
结果:
3.5 nn.ReLU6
(1)原型
torch.nn.ReLU6(inplace=False)
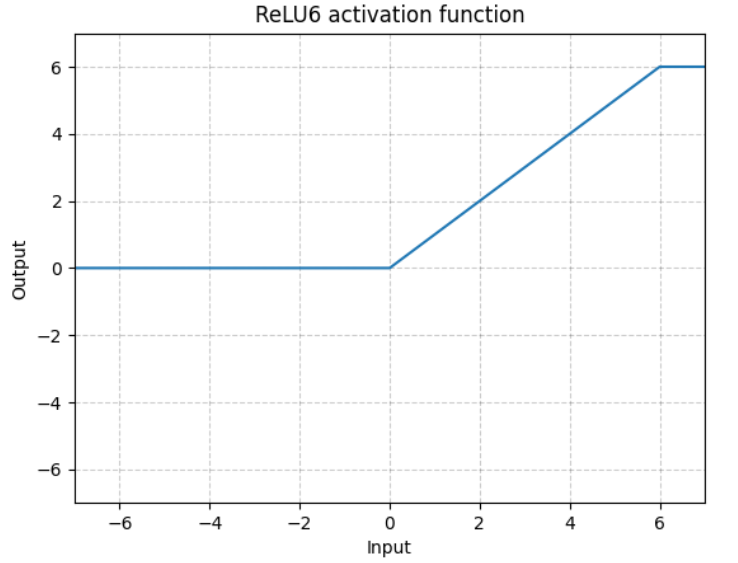
(2)ReLU6函数表达式及图像
逐元素执行:

(3)参数
- inplace — 选择是否就地执行操作,即是否对Input本身执行该操作。若为True,则对Input执行ReLU的同时也会改变(或刷新)Input的值,使得Input=Output;若为False,则不会改变Input的值。默认:False
(4)用法示例
m = nn.ReLU6()
input = torch.randn(2)
output = m(input)
print(f'input shape: {input}', f'output shape: {output}', sep='\n')
结果:

3.6 nn.GeLU
(1)原型
torch.nn.GELU
(2)GELU函数表达式及图像
逐元素执行:

 是高斯分布的累积分布函数(概率密度函数的积分),表示如下:
是高斯分布的累积分布函数(概率密度函数的积分),表示如下:


(3)用法示例
# GeLU
m = nn.GELU()
input = torch.randn(2)
output = m(input)
print('input: ', input, 'output: ', output, sep='\n')
结果:
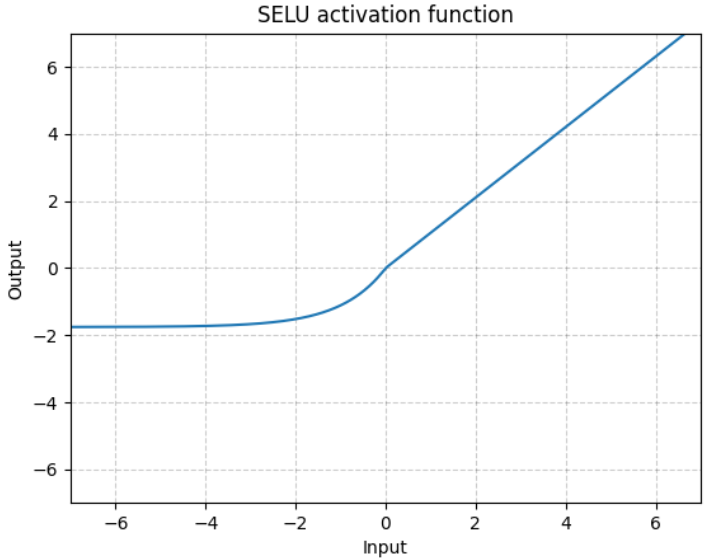
3.7 nn.SeLU
(1)原型
torch.nn.SELU(inplace=False)
注:当使用 kaiming_normal 或 kaiming_normal_ 进行初始化时,应使用 nonlinearity='linear' 而不是 nonlinearity='selu',以获得自归一化神经网络。
更多细节详见 Self-Normalizing Neural Networks 一文。
(2)SELU函数表达式及图像
逐元素执行:

式中:α=1.6732632423543772848170429916717,scale=1.0507009873554804934193349852946
(3)参数
- inplace(bool, 可选择)— 选择是否就地执行操作,即是否对Input本身执行该操作。若为True,则对Input执行ReLU的同时也会改变(或刷新)Input的值,使得Input=Output;若为False,则不会改变Input的值。默认:False
(4)用法示例
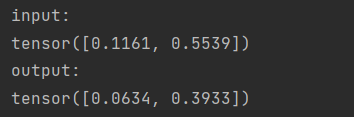
# SeLU
m = nn.SELU()
input = torch.randn(2)
output = m(input)
print('input: ', input, 'output: ', output, sep='\n')
结果:

4. Non-linear Activations (other)
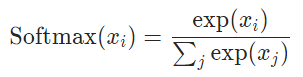
4.1 nn.Softmax
(1)原型
torch.nn.Softmax(dim=None)
将 Softmax 函数应用于 n 维的输入张量,改变他们的大小,使得 n 维输出张量的元素位于 [0, 1] 范围内,并且总和为0。
当输入张量是稀疏张量时,未指定的值将被视为 -inf。
需要注意的是,该模块不直接与 NLLLoss 一起使用,它期望在 Softmax 和自身之间计算 Log。 改用 LogSoftmax(它更快并且具有更好的数值属性)
(2)Softmax函数表达式
(3)参数
- dim (int) — 计算 Softmax 的维度(因此沿 dim 的每个切片总和为 1)。
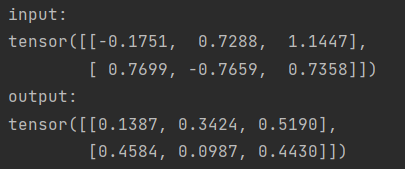
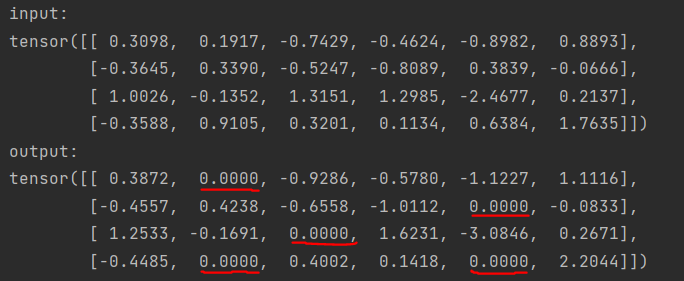
(4)用法示例
# Softmax
m = nn.Softmax(dim=1)
input = torch.randn(2, 3)
output = m(input)
print('input: ', input, 'output: ', output, sep='\n')
结果:
5 . Normalization Layers
5.1 nn.BatchNorm2d
(1)原型
torch.nn.BatchNorm2d(num_features, eps=1e-05, momentum=0.1, affine=True,
track_running_stats=True, device=None, dtype=None)
对4D输入应用批量归一化(具有附加通道尺寸的小批量的2D输入)。详述可参考论文 Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift .
(2)参数
num_features — 指特征数。一般情况下输入的数据格式为(batch_size,num_features,height,width)其中的C为特征数,也称channel数
eps — 为了分数值稳定而添加到分母的值。默认:1e-5
momentum — 用于运行过程中均值和方差的估计参数。可以将累积移动平均线(即简单平均线)设置为
None。默认:0.1affine — 此模块是否具有可学习的仿射参数。默认:True
track_running_stats — 一个布尔值,当设置为True时,此模块跟踪运行平均值和方差;设置为False时,此模块不跟踪此类统计信息,并将统计信息缓冲区running_mean和running_var初始化为None。当这些缓冲区为None时,此模块将始终使用批处理统计信息。在训练和评估模式下都可以。默认:True
(3)用法示例
# With Learnable Parameters
m = nn.BatchNorm2d(100)
# Without Learnable Parameters
m = nn.BatchNorm2d(100, affine=False)
input = torch.randn(20, 100, 35, 45)
output = m(input)
6. Linear Layers
6.1 nn.Linear
(1)原型
torch.nn.Linear(in_features, out_features, bias=True, device=None, dtype=None)
对输入数据进行线性变换:

(2)参数
in_features — 每个输入样本的尺寸
out_features — 每个输出样本的尺寸
bias — 该层是否会学习一个额外的偏置项。默认:True
- device — 代表将分配到设备的对象('cpu' 或 'cuda',cuda需设置设备编号,比如 'cuda:0'、'cuda:1' 等)
- dtype — 代表数据类型
(3)属性
- ~Linear.weight (torch.Tensor) — 形状为(out_features, in_features)的模型的可学习的偏置项
初始化为:

- ~Linear.bias — 形状为out_features的模型的可学习的偏置项
如果bias为True,初始化为:

(4)用法示例
# Linear
m = nn.Linear(20, 30)
input = torch.randn(128, 20)
output = m(input)
print(f'output size: {output.size()}', f'weight size: {m.weight.size()}', f'bias size: {m.bias.size()}', sep='\n')
结果:

7. Dropout Layers
7.1 nn.Dropout
(1)原型
torch.nn.Dropout(p=0.5, inplace=False)
在训练期间,使用来自伯努利分布的样本以概率 p 将输入张量的一些元素随机归零。 每个通道将在每次前向调用时独立归零。
Dropout是一种用于正则化和防止神经元间互适应的有效技术,详细介绍可参考 Improving neural networks by preventing co-adaptation of feature detectors 一文。此外,输出在训练期间按 1/(1-p) 倍缩放。 这意味着在评估期间,模块只计算一个恒等函数。
输入可以是任意形状的张量,输出形状与输入保持一致。
(2)参数
p — 元素归零的概率。默认:0.5
inplace — 选择是否就地执行操作,即是否对Input本身执行该操作。若为True,则对Input执行ReLU的同时也会改变(或刷新)Input的值,使得Input=Output;若为False,则不会改变Input的值。默认:False
(3)用法示例
# Dropout
m = nn.Dropout(p=0.2)
input = torch.randn(4, 6)
output = m(input)
print('input:', input, 'output:', output, sep='\n')
结果:
问:除了以 p=0.2 的概率随机归零的一些元素以外,其他元素的值为什么也变化了?
答:所有的元素都会在训练期间按 1/(1-p) 倍缩放。
7.2 nn.Dropout2d
(1)原型
torch.nn.Dropout2d(p=0.5, inplace=False)
不同于前一节的Dropout,Dropout2d是将整个通道随机归零(一个通道通常代表一个2D特征图,比如:在批量输入中,第 i 个样本的第 j 个通道是一个2D的张量 input[i, j]),使用来自伯努利分布的样本,每个通道将在每次前向调用中使用来自伯努利分布的样本以概率 p 独立清零。
如论文 Efficient Object Localization Using Convolutional Networks 中所述,如果特征图中的相邻像素是强相关的(通常在早期卷积层中就是这种情况),那么 dropout 不会规范激活,否则只会导致有效的学习率降低。在这种情况下,nn.Dropout2d() 将有助于促进特征图之间的独立性,应改为使用。
输入可以是 (N, C, H, W) 或 (C, H, W) ,输出和输入形状一致,也是(N, C, H, W) 或 (C, H, W) 。
(2)参数
p — 元素归零的概率。默认:0.5
inplace — 选择是否就地执行操作,即是否对Input本身执行该操作。若为True,则对Input执行ReLU的同时也会改变(或刷新)Input的值,使得Input=Output;若为False,则不会改变Input的值。默认:False
(3)用法示例
# Dropout
m = nn.Dropout(p=0.2)
input = torch.randn(4, 6)
output = m(input)
print('input:', input, 'output:', output, sep='\n')
结果:

8. Loss Functions
8.1 nn.L1Loss
(1)原型
torch.nn.L1Loss(size_average=None, reduce=None, reduction='mean')
计算输入 x 和目标 y 之间的平均绝对误差(MAE)。x可以是任意维度的张量;y形状和x保持一致。
(2)公式
(3)参数
size_average (bool, 可选参数) — 已弃用(参考reduction参数)。默认情况下,损失是批次中每个损失元素的平均值。请注意,对于某些损失,每个样本有多个元素。如果字段 size_average 设置为 False,则将每个 minibatch 的损失相加。当 reduce 为 False 时忽略。默认:True
reduce (bool, 可选参数) — 已弃用(参考reduction参数)。默认情况下,损失会根据 size_average 对每个小批量的观测值进行平均或求和。当 reduce 为 False 时,返回每个批次元素的损失并忽略 size_average。默认:True
reduction (string, 可选参数) — 指定要用于输出的reduction取值:none,mean,sum。none:不使用reduction;mean:输出的总和将除以输出中的元素数;sum:输出将被求和。注意:size_average 和 reduce 正在被弃用,同时,指定这两个参数中的任何一个都将覆盖 reduction。默认:mean
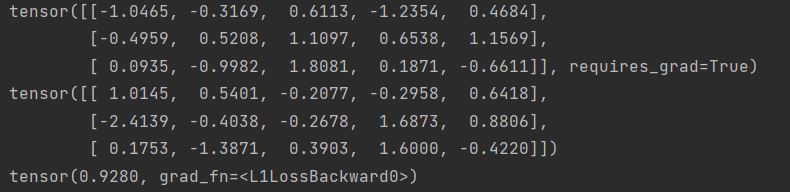
(4)用法
# L1Loss
loss = nn.L1Loss()
input = torch.randn(3, 5, requires_grad=True)
target = torch.randn(3, 5)
output = loss(input, target)
output.backward()
print(input, target, output, sep='\n')
结果:
8.2 nn.MSELoss(L2Loss)
(1)原型
torch.nn.MSELoss(size_average=None, reduce=None, reduction='mean')
计算输入 x 和目标 y 中的每个元素之间的均方误差(平方 L2 范数)
(2)公式
(3)参数
size_average (bool, 可选参数) — 已弃用(参考reduction参数)。默认情况下,损失是批次中每个损失元素的平均值。请注意,对于某些损失,每个样本有多个元素。如果字段 size_average 设置为 False,则将每个 minibatch 的损失相加。当 reduce 为 False 时忽略。默认:True
reduce (bool, 可选参数) — 已弃用(参考reduction参数)。默认情况下,损失会根据 size_average 对每个小批量的观测值进行平均或求和。当 reduce 为 False 时,返回每个批次元素的损失并忽略 size_average。 默认:True
reduction (string, 可选参数) — 指定要用于输出的reduction取值:none,mean,sum。none:不使用 reduction;mean:输出的总和将除以输出中的元素数;sum:输出将被求和。注意:size_average 和 reduce 正在被弃用,同时,指定这两个参数中的任何一个都将覆盖 reduction。 默认:mean
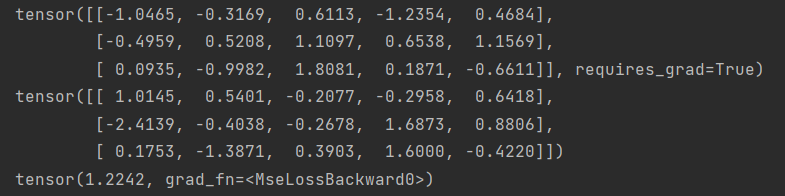
(4)用法
# MSELoss(L2Loss)
loss = nn.MSELoss()
input = torch.randn(3, 5, requires_grad=True)
target = torch.randn(3, 5)
output = loss(input, target)
output.backward()
print(input, target, output, sep='\n')
结果:
8.3 nn.CrossEntropyLoss
(1)原型
torch.nn.CrossEntropyLoss(weight=None, size_average=None, ignore_index=- 100, reduce=None, reduction='mean', label_smoothing=0.0)
计算输入 x 和目标 y 之间的交叉熵损失
(2)公式
(3)参数
weight (Tensor, 可选参数) – 手动重新调整每个类别的权重。如果给定,则必须是大小为 C 的张量
size_average (bool, 可选参数) – 已弃用(参考reduction参数)。默认情况下,损失是批次中每个损失元素的平均值。请注意,对于某些损失,每个样本有多个元素。如果字段 size_average 设置为 False,则将每个 minibatch 的损失相加。当 reduce 为 False 时忽略。默认:True
ignore_index (int, 可选参数) – 指定一个被忽略且不影响输入梯度的目标值。当 size_average 为 True 时,损失在非忽略目标上进行平均。请注意,ignore_index 仅适用于目标包含类索引时。
reduce (bool, 可选参数) – 已弃用(参考reduction参数)。默认情况下,损失会根据 size_average 对每个小批量的观测值进行平均或求和。当 reduce 为 False 时,返回每个批次元素的损失并忽略 size_average。默认:True
reduction (string, 可选参数) – 指定要用于输出的reduction取值:none,mean,sum。none:不使用reduction;mean:取输出的加权平均值;sum:输出将被求和。注意:size_average 和 reduce 正在被弃用,同时,指定这两个参数中的任何一个都将覆盖 reduction。默认:mean
label_smoothing (float, 可选参数) – [0.0, 1.0]之间的浮点数。指定计算损失时的平滑量,其中0.0表示不平滑。target变成了原本ground truth和 Rethinking the Inception Architecture for Computer Vision 一文中所述的均匀分布的组合。默认值:0.0
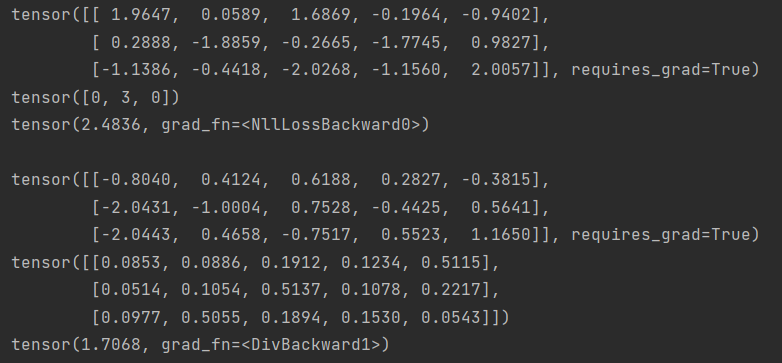
(4)用法
# Example of target with class indices
loss = nn.CrossEntropyLoss()
input = torch.randn(3, 5, requires_grad=True)
target = torch.empty(3, dtype=torch.long).random_(5)
output = loss(input, target)
output.backward()
print(input, target, output, sep='\n') print('') # Example of target with class probabilities
input = torch.randn(3, 5, requires_grad=True)
target = torch.randn(3, 5).softmax(dim=1)
output = loss(input, target)
output.backward()
print(input, target, output, sep='\n')
结果:
参考资料
2、【Pytorch系列】nn.BatchNorm2d用法详解
【PyTorch】常用的神经网络层汇总(持续补充更新)的更多相关文章
- pytorch常用函数总结(持续更新)
pytorch常用函数总结(持续更新) torch.max(input,dim) 求取指定维度上的最大值,,返回输入张量给定维度上每行的最大值,并同时返回每个最大值的位置索引.比如: demo.sha ...
- pytorch神经网络层搭建方法
神经网络层的搭建主要是两种方法,一种是使用类(继承torch.nn.Moudle),一种是使用torch.nn.Sequential来快速搭建. 1)首先我们先加载数据: import torchim ...
- 《WCF技术剖析》博文系列汇总[持续更新中]
原文:<WCF技术剖析>博文系列汇总[持续更新中] 近半年以来,一直忙于我的第一本WCF专著<WCF技术剖析(卷1)>的写作,一直无暇管理自己的Blog.在<WCF技术剖 ...
- 中国.NET:各地微软技术俱乐部汇总(持续更新中...)
中国.NET:各地微软技术俱乐部汇总(持续更新中...) 本文是转载文,源地址: https://www.cnblogs.com/panchun/p/JLBList.html by 史记微软. ...
- Linux常用到的指令汇总
Linux常用到的指令汇总 根据鸟哥linux私房菜上定义的:一定要先學會的指令:ls, more, cd, pwd, rpm, ifconfig, find 登入與登出(開機與關機):telnet, ...
- jquery常用函数与方法汇总
1.delay(duration,[queueName]) 设置一个延时来推迟执行队列中之后的项目. jQuery1.4新增.用于将队列中的函数延时执行.他既可以推迟动画队列的执行,也可以用于自定义队 ...
- mysql copy表或表数据常用的语句整理汇总
mysql copy表或表数据常用的语句整理汇总. 假如我们有以下这样一个表: id username password ----------------------------------- 1 a ...
- Vue常用经典开源项目汇总参考-海量
Vue常用经典开源项目汇总参考-海量 Vue是什么? Vue.js(读音 /vjuː/, 类似于 view) 是一套构建用户界面的 渐进式框架.与其他重量级框架不同的是,Vue 采用自底向上增量开发的 ...
- 深度学习之TensorFlow构建神经网络层
深度学习之TensorFlow构建神经网络层 基本法 深度神经网络是一个多层次的网络模型,包含了:输入层,隐藏层和输出层,其中隐藏层是最重要也是深度最多的,通过TensorFlow,python代码可 ...
随机推荐
- java动态代理--代理接口无实现类
转载:https://blog.csdn.net/weixin_45674354/article/details/103246715 1.接口定义: package cn.proxy; public ...
- 什么是内部类?Static Nested Class和Inner Class的不同?
内部类就是在一个类的内部定义的类,内部类中不能定义静态成员,内部类可以直接访问外部类中的成员变量,内部类可以定义在外部类的方法外面,也可以定义在外部类的方法体中.在方法外部定义的内部类前面可以加上st ...
- Configuration problem: 'bean' or 'parent' is required for <ref> element
我出现此错误的原因是web.xml中没有指定spring的启动配置文件applicationContext.xml的加载位置.applicationContext.xml原来再webRoot/webI ...
- Java 建造者Builder
import java.util.ArrayList; import java.util.List; import java.util.function.Consumer; import java.u ...
- awk 详解?
awk '{pattern + action}' {filenames} #cat /etc/passwd |awk -F ':' '{print 1"\t"7}' //-F 的意 ...
- 一个 Spring 的应用看起来象什么?
一个定义了一些功能的接口.这实现包括属性,它的 Setter , getter 方法和函数等.Spring AOP.Spring 的 XML 配置文件.使用以上功能的客户端程序.
- 学习zabbix(七)
zabbix自定义监控项 1.创建主机组,可以根据redis.mysql.web等创建对于的主机组 2.创建主机 3.创建Screens 4.自定义监控项 zabbix_agentd.conf配置文件 ...
- 【动态系统的建模与分析】9_一阶系统的频率响应_低通滤波器_Matlab/Simulink分析
magnitude response:振幅响应 phase response:相位响应 传递函数G(S)为什么将S看成jw化成G(jw)通过[动态系统的建模与分析]8_频率响应_详细数学推导 G(jw ...
- 2015 年十佳 HTML5 应用
前言 优秀的前端工程师戴着脚铐跳舞,究竟能把 HTML5 的体验推进到什么程度? 这些 Web apps 是我们运营云集浏览器的网上应用店一年来,我选出的十佳 Web apps.其中参考了同事们的意见 ...
- html元素contenteditable属性如何定位光标和设置光标
最近在山寨一款网页微信的产品,对于div用contenteditable属性做的编辑框有不少心得,希望可以帮到入坑的同学. 废话不多说了,我们先来理解一下HTML的光标对象是如何工作的,后面我会贴完整 ...