linux虚拟摄像头vivid配置
总述
最近在看摄像头驱动,需要配置虚拟摄像头的驱动,但是教程里面是linux2.6内核的,实际电脑的是Ubuntu16,内核是linux4.15版本,从2.6到4.15内核好多文件发生了变化,所以我们该怎么操作呢?下面就让我给大家介绍一哈,怎么下载最新的内核并进行编译成虚拟摄像头驱动。
作者:良知犹存
转载授权以及围观:欢迎添加微信公众号:Conscience_Remains
1 查看并下载源码
使用命令查看当前系统的内核
uname -a Linux lyn 4.15.0-117-generic #118~16.04.1-Ubuntu SMP Tue Sep 8 14:54:40 UTC 2020 x86_64 x86_64 x86_64 GNU/Linux
![]()

![]()
可以看到内核版本是4.15,然后我们就可以去下载源码去了
去www.kernel.org找同版本的内核,如果没有请找最相近的内核代码
![]()
![]()
![]()
因为我的版本已经是4.15属于v4.x,所以选择了v4.x进入
![]()
最后用网页搜索选择了4.15的一个版本进行了下载
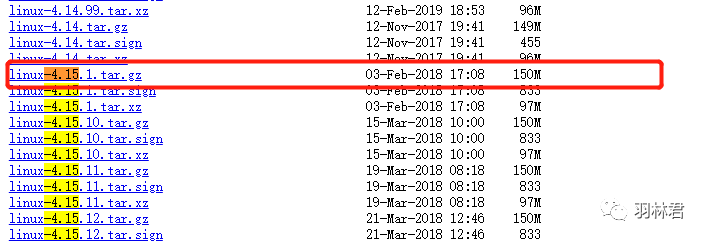
![]()
tar xzf linux-4.15.1.tar.gz 解压文件
![]()
新版本的linux下已经更名为vivid,可以用find寻找一下目录
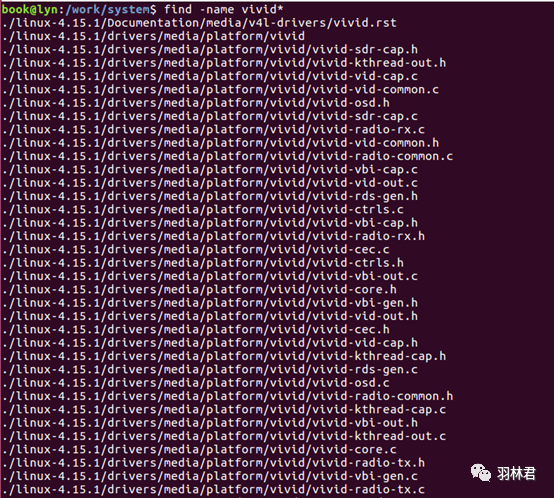
![]()
之后就把
linux-4.15.1/drivers/media/platform/vivid/
目录下所有文件拷贝的一个文件夹下

![]()
2 进行VIVID驱动编译
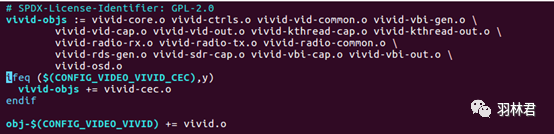
首先我们看一下,在vivid文件目录下本来的Makefile文件,这个Makefile编译之后选项配置由CONFIG_VIDEO_VIVID这个变量控制,显然不符合我们的要求
![]()
首先编译我们需要选择编译的内核目录,首先我在linux的usr(usr被称为是Unix System Resource,即Unix系统资源的缩写。/usr 是系统核心所在,包含了所有的共享文件。它是 unix 系统中最重要的目录之一,涵盖了二进制文件,各种文档,各种头文件,还有各种库文件;还有诸多程序,例如 ftp,telnet 等等。)目录下寻找。
cd /usr/src/linux......
![]()
这样就可以看到对应的内核目录了

![]()
经过添加内核目录,然后添加上需要编译的文件,一个简单的驱动Makefile就做好了,当然这个也不是最完美的,请听我一一道来。
KERN_DIR = /usr/src/linux-headers-4.15.0-118-generic all:
make -C $(KERN_DIR) M=`pwd` modules
clean:
make -C $(KERN_DIR) M=`pwd` modules clean
rm -rf modules.order obj-m := vivid-core.o vivid-ctrls.o vivid-vid-common.o vivid-vbi-gen.o \
vivid-vid-cap.o vivid-vid-out.o vivid-kthread-cap.o vivid-kthread-out.o \
vivid-radio-rx.o vivid-radio-tx.o vivid-radio-common.o \
vivid-rds-gen.o vivid-sdr-cap.o vivid-vbi-cap.o vivid-vbi-out.o \
vivid-osd.o vivid-cec.o
![]()
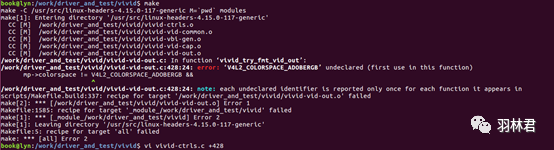
开始进行编译,出现一个error
/work/driver_and_test/vivid/vivid-ctrls.c:In function ‘vivid_vid_cap_s_ctrl’:
/work/driver_and_test/vivid/vivid-ctrls.c:346:3:error: ‘V4L2_COLORSPACE_ADOBERGB’ undeclared (first use in this function)
V4L2_COLORSPACE_ADOBERGB,
^
/work/driver_and_test/vivid/vivid-ctrls.c:346:3:note: each undeclared identifier is reported only once for each function itappears in
scripts/Makefile.build:337: recipe fortarget '/work/driver_and_test/vivid/vivid-ctrls.o' failed
make[2]: ***[/work/driver_and_test/vivid/vivid-ctrls.o] Error 1
![]()
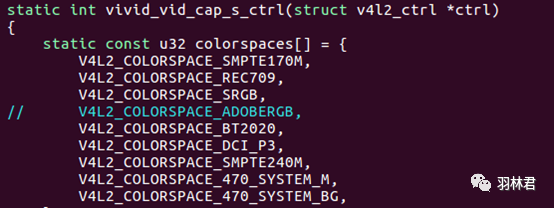
出现了未定义V4L2_COLORSPACE_ADOBERGB变量的error
但是在正则表达式去搜索文件定义的时候发现vivid目录下所有文件都没有定义过,所以我直接选择进行出问题的地方进行注释
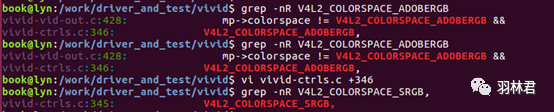
![]()
vi vivid-ctrls.c +346 //注释掉相关定义
![]()
![]()
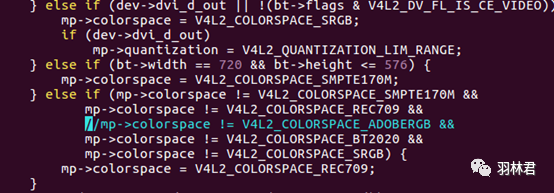
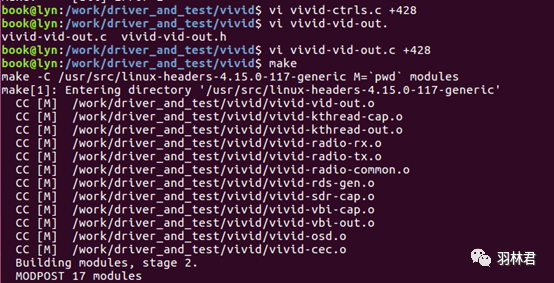
继续编译出现另一处类似的错误,继续注释掉
![]()
![]()
![]()
不过这次用这个Makefile编译完之后,我们编译出了好多个.ko文件,在实际加载驱动时候很不方便
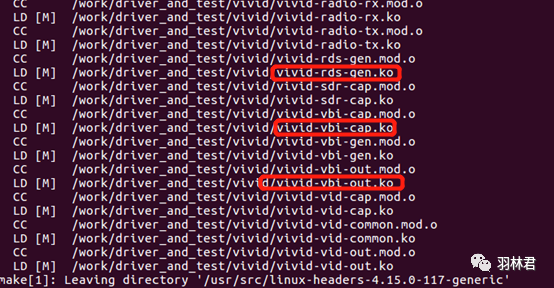
![]()
所以我们需要重新修改Makefile文件,把vivid目录下的文件都编译成一个.o文件,按然后再编译为一个.ko文件
MakeFile内容如下所示:
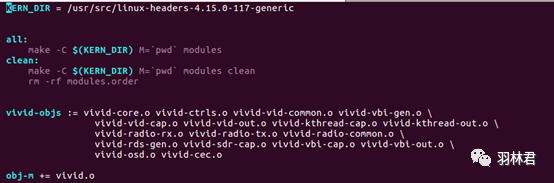
![]()
编译结果如下,只有一个vivid,ko文件
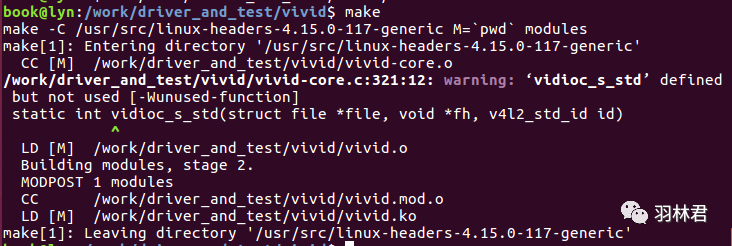
![]()
3 测试体验效果
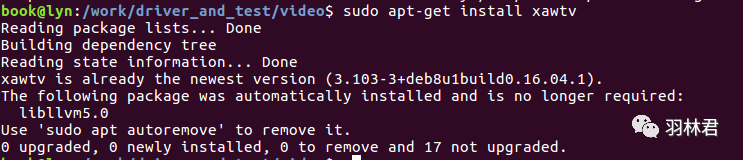
首先我们先安装xawtv
xawtv是用于使用电视调谐器或卫星接收卡(DVB-S)观看和录制电视和网络摄像头的软件。xawtv可在类似Unix的操作系统上运行,并已获得GPL许可。
维基百科
sudo apt-get install xawtv
![]()
![]()
sudo modprobe vivid
//安装自带vivid及依赖,这里先使用modprobr加载vivid,会将其依赖一并加载,然后再卸载vivid,最后加载上我们编译的vivid.ko
sudo rmmod vivid //卸载自带的vivid
sudo insmod./vivid.ko //安装自己编译的vivid.ko
![]()

![]()
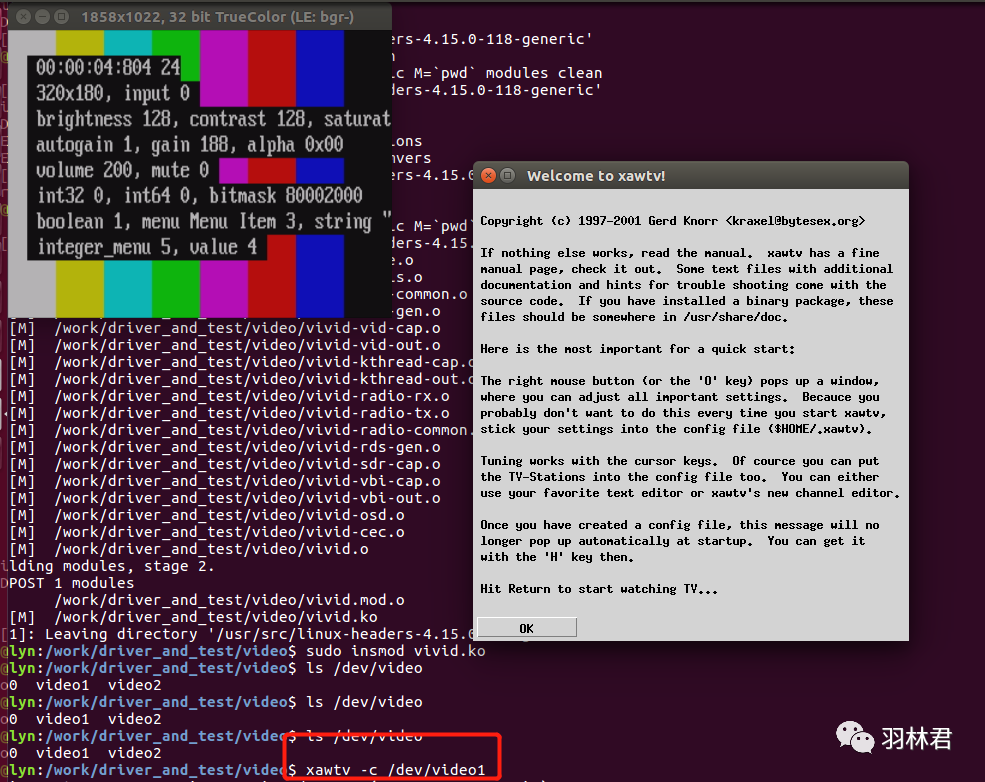
xawtv -h //帮助信息
xawtv -c/dev/videoX //指定设备
xawtv -noalsa //关闭声卡启动
xawtv //运行摄像头
![]()
如图所示,虚拟摄像头就开始运行起来了。
![]()
这就是我分享的linux4.15内核下的虚拟摄像头配置,如果大家有什么更好的思路,欢迎分享交流哈。

![]()
更多分享,扫码关注我
linux虚拟摄像头vivid配置的更多相关文章
- linux(十二)___Apache服务器用户认证、虚拟主机的配置
创建xiangkejin zhangsan两个用户 可看见文件中创建的两个用户: 建立虚拟目录并配置用户认证 ①建立虚拟目录 /xiangkejin ②在Apache的主配置文件httpd.conf ...
- Linux网络配置之虚拟网卡的配置(ubuntu 16.04)
关于图形界面的配置,我这里就不多介绍了,这个很简单.这里介绍的是如何通过修改配置文件来实现虚拟网卡. 首先介绍ubuntu(我这里使用的是ubuntu-16.04)下虚拟网卡的配置 1.先用ifcon ...
- (四) 虚拟摄像头vivi体验
目录 虚拟摄像头vivi体验 源码下载 修改Makefile 安装xawtv 测试体验 title: 虚拟摄像头vivi体验 date: 2019/4/23 19:20:00 toc: true -- ...
- 虚拟摄像头vivi的测试(二)
(前一部分的基础操作来源于作者:LingXiaokai 的 Ubuntu 9.10 下如何使用笔记本摄像头以及虚拟摄像头vivi的测试) 自己仅对实际操作中需要注意的点进行阐述 一.先在Ubuntu ...
- LINUX+Vmware+SVN的配置和安装
LINUX+Vmware+SVN的配置和安装 验证SVN安装了没有 svnserve --version 查看CentOS自带JDK是否已安装. ◆输入:yum list installed |gre ...
- Linux通过NAT方式配置网络
步骤:1.将虚拟机的网卡VMware Network Adapter VMnet8改成DHCP自动获取IP.2.将Linux虚拟机的网卡自定义连接到VMware Network Adapter VMn ...
- Go 语言开发的基于 Linux 虚拟服务器的负载平衡平台 Seesaw
负载均衡系统 Seesaw Seesaw是由我们网络可靠性工程师用 Go 语言开发的基于 Linux 虚拟服务器的负载平衡平台,就像所有好的项目一样,这个项目也是为了解决实际问题而产生的. Seesa ...
- Linux USB摄像头驱动【转】
本文转载自:http://www.itdadao.com/articles/c15a509940p0.html 在 cortex-a8 中,可接入摄像头的接口通常可以分为两种, CAMERA 接口和 ...
- macOS平台下虚拟摄像头的研发总结
一.背景介绍 虚拟摄像头,顾名思义,就是利用软件技术虚拟出一个摄像头硬件设备供用户使用.当我们需要对视频图像进行处理再输出时,虚拟摄像头就具备非常大的价值了.关于如何在Windwos上实现一个虚拟设备 ...
随机推荐
- 使用python做一个IRC在线下载器
使用python做一个IRC在线下载器 1.开发流程 2.软件流程 3.开始 3.0 准备工作 3.1寻找API接口 3.2 文件模块 3.2.1 选择文件弹窗 3.2.2 提取文件名 3.2.2.1 ...
- thinkphp3.2框架运行原理
thinkphp3.2是使用率非常普遍的国产php框架,以简单易于上手闻名,那么它框架结构是怎样的? tp3.2设计简单来说就是CBD,core(框架核心文件),bebavior(行为,tp3.2一大 ...
- puppetlabs地址
https://yum.puppetlabs.com/el/6Server/products/i386/ rpm -Uvh http://yum.puppetlabs.com/el/6Server/ ...
- Xctf攻防世界—crypto—Normal_RSA
下载压缩包后打开,看到两个文件flag.enc和pubkey.pem,根据文件名我们知道应该是密文及公钥 这里我们使用一款工具进行解密 工具链接:https://github.com/3summer/ ...
- 三节锂电池充电管理芯片,IC电路图如何设计
关于三节锂电池供电的产品,在三节锂电池上,需要三个电路系统: 1,三节锂电池保护电路, 2,三节锂电池充电电路, 3,三节锂电池输出电路. 1.三节锂电池保护电路,芯片电路图 控制三节锂电池池的充电电 ...
- Java 如何给Word文档添加多行文字水印
前言 我在以往的文章中曾介绍过如何给Word文档添加文本水印和图片水印,及怎样删除文档中的水印.关于文本水印,之前那篇教程里主要指的是单行字体的水印,而在操作Word文档时,有时也会碰到需要添加多行文 ...
- dotnet cli 5.0 新特性——dotnet tool search
dotnet cli 5.0 新特性--dotnet tool search Intro .NET 5.0 SDK 的发布,给 dotnet cli 引入了一个新的特性,dotnet tool sea ...
- XShell的手动直连,避免配置ssh免密的一些问题
- Linux 通过端口终止进程
以下命令可用于杀死占用某端口的所有进程. root 用户: kill -9 $(lsof -i tcp:进程号 -t) 非 root 用户: kill -9 $(sudo lsof -i tcp:进程 ...
- JVM 调优 内存调优 CPU 使用调优 锁竞争调优 I/O 调优
Twitter 工程师谈 JVM 调优 2016年03月24日 10:22:30 wenniuwuren https://blog.csdn.net/wenniuwuren/article/detai ...