RT Thread的SPI设备驱动框架的使用以及内部机制分析
注释:这是19年初的博客,写得很一般,理解不到位也不全面。19年末得空时又重新看了RTThread的SPI和GPIO,这次理解得比较深刻。有时间时再整理上传。
-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
使用SPI设备驱动框架操作max32865读取PT100的例子程序:
#include "board.h"
#include "drv_spi.h"
#include "max31865.h" #define TempModule_SPI_BUS_NAME "spi2" // 对应硬件
#define TempModule_DEVICE_NAME "spi20" // 这个名字无所谓 不需要对应硬件 #define CS_PIN 28 static struct stm32_hw_spi_cs spi_cs; static struct TempModule_device_ TempModule_device; int rt_hw_TempModule_Config(void)
{
rt_err_t res; struct rt_spi_device * rt_spi_device; rt_pin_mode(CS_PIN, PIN_MODE_OUTPUT); spi_cs.GPIOx = GPIOB;
spi_cs.GPIO_Pin = GPIO_PIN_12; // 这个要根据SPI设备名字 来 查找 设备 功能1: 把spi20挂到spi2上
res = rt_hw_spi_device_attach(TempModule_SPI_BUS_NAME, TempModule_DEVICE_NAME, spi_cs.GPIOx, spi_cs.GPIO_Pin);
if( res == RT_EOK )
{
rt_kprintf("\n rt_hw_spi_device_attach(), OK! \r\n");
} rt_spi_device = (struct rt_spi_device *)rt_device_find(TempModule_DEVICE_NAME); TempModule_device.Handle_TempModule_spibus = rt_spi_device; if( rt_spi_device == RT_EOK )
{
rt_kprintf("\n rt_device_find OK! \r\n");
} /* config spi */
{
struct rt_spi_configuration cfg;
cfg.data_width = 8;
cfg.mode = RT_SPI_MASTER | RT_SPI_MODE_1 | RT_SPI_MSB;
cfg.max_hz = 1 * 30 *1000; /* SPI max 42MHz,ssd1351 4-wire spi */ res = rt_spi_configure(rt_spi_device, &cfg); if( res == RT_EOK )
{
rt_kprintf("\n rt_spi_configure(), OK! \r\n");
}
} return RT_EOK;
} static int rt_hw_TempModule_init(void)
{
rt_hw_TempModule_Config(); // IO 方向
// rt_pin_mode(TempModuleNCS_PIN, PIN_MODE_OUTPUT); // 中断 // IO初值设置
TempModule_NCS_H();
rt_kprintf("rt_hw_TempModule_init \r\n");
return 0;
}
INIT_PREV_EXPORT(rt_hw_TempModule_init); /* 组件自动初始化 */ u8 TempModuleByte( u8 Sdata)
{
u8 Rdata = 0;
rt_enter_critical();
// Sdata = 0x55;
// rt_spi_send_then_recv第一个形参:struct rt_spi_device *device;
// rt_spi_send_then_recv( TempModule_device.Handle_TempModule_spibus, &Sdata, (rt_size_t)1, &Rdata, (rt_size_t)1);
//Rdata = rt_spi_send(TempModule_device.Handle_TempModule_spibus, &Sdata, 1); rt_spi_transfer(TempModule_device.Handle_TempModule_spibus, &Sdata, &Rdata, 1); rt_exit_critical();
return Rdata;
} void TempModuleWrite(u16 WrPara)
{
u8 tmp[2] = {0}; tmp[0]= WrPara>>8;
tmp[1]= WrPara&0xFF; // TempModuleByte(WrPara>>8);
// TempModuleByte(WrPara&0xFF); rt_spi_send(TempModule_device.Handle_TempModule_spibus, tmp, 2);
} u8 TempModuleRead(u8 adr)
{
u8 tmp; // TempModuleByte(adr);
// tmp = TempModuleByte(0xFF); tmp = rt_spi_sendrecv8(TempModule_device.Handle_TempModule_spibus, adr); return tmp;
} float Get_tempture(void)
{
float temps;
uint16_t dtemp[2];
uint16_t data_temp;
dtemp[0]=TempModuleRead(0x1);
// rt_kprintf("dtemp[0] = %d \r\n",dtemp[0]); dtemp[1]=TempModuleRead(0x2);
// rt_kprintf("dtemp[1] = %d \r\n",dtemp[1]); data_temp=(dtemp[0]<<7)+(dtemp[1]>>1);//Get 15Bit DATA;
temps=data_temp;
temps=(temps*402)/32768;//Here is the rtd R value;
temps=(temps-100)/0.385055;//A gruad
return temps;
}
下面提出我的疑问:

网友提示:
ENV打开了 spix, 就会加载对应的drv 里面的注册函数。
我的理解:图YY
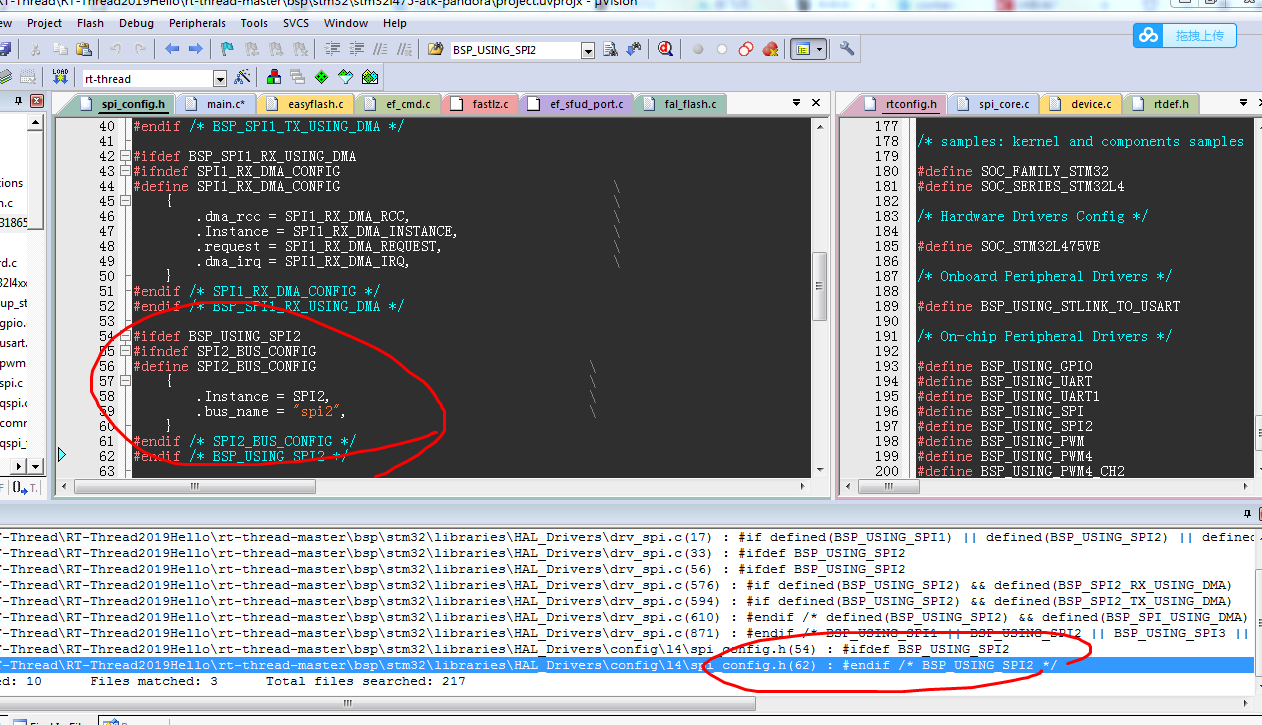
继续找,猜想注册spi2硬件的时候 肯定 会用到这个包含“spi2”字符串的SPI2_BUS_CONFIG信息。 《==== 接下来的目标转换为找到这个在哪注册的。
实测,“spi2”这个字符串一定要和硬件所使用的对应(其他文件内我还会配置硬件SPI2对应的IO口),为什么?
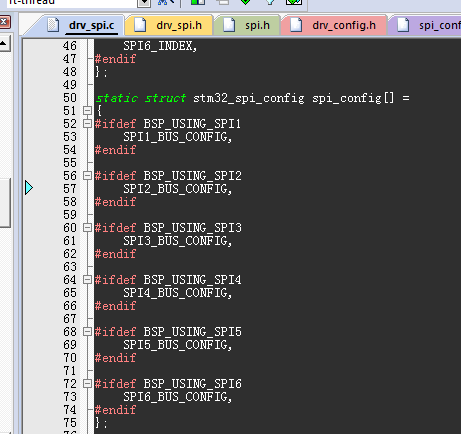
spi_config[]配置信息容器:
这个是个核心,如果一个SPIx的宏都没打开,那么这个数组的长度就是0. 待初始化的SPI总线的个数就是0.
可以通过数组的长度来计算需要初始化的SPI总线(spi1、spi2)的个数。
上述过程是由RTT的组件自动初始化技术:INIT_BOARD_EXPORT(负责硬件初始化的函数名); 完成。
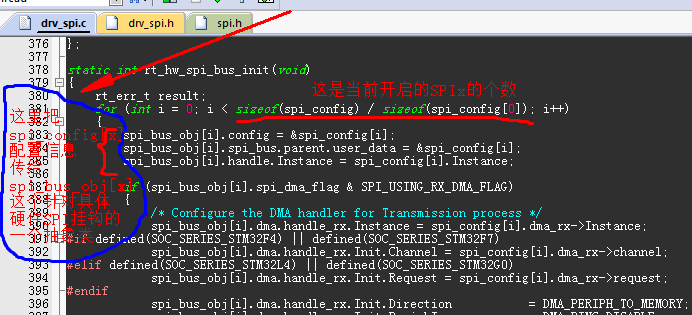
下图是 -- 图X:
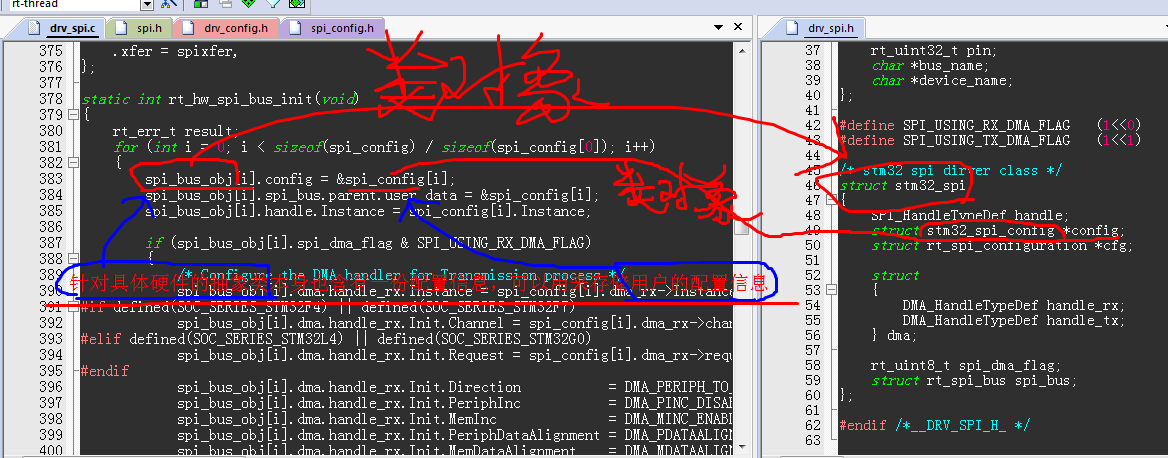
针对具体硬件SPI总线的抽象类也含有一份配置信息,可以用来存储用户的配置信息。
到这里,已经基本解决了上述的一个疑惑:针对硬件的spi2,是不是在软件里就是使用了 “spi2”这个字符串作为其名字? 答案是:是的。
到了这里,也就慢慢拓展开了SPI设备驱动框架的玩法。
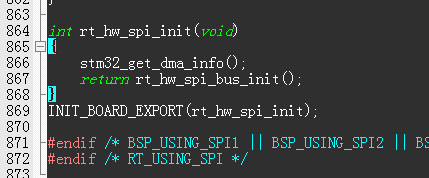
使用组件自动初始化技术调用 rt_hw_spi_bus_init()函数。
// 关于组件自动初始化技术,参考另外的博文。
https://mp.weixin.qq.com/s?__biz=MzAwMDUwNDgxOA==&mid=2652663356&idx=1&sn=779762953029c0e0946c22ef2bb0b754&chksm=810f28a1b678a1b747520ba3ee47c9ed2e8ccb89ac27075e2d069237c13974aa43537bff4fba&mpshare=1&scene=1&srcid=0111Ys4k5rkBto22dLokVT5A&pass_ticket=bGNWMdGEbb0307Tm%2Ba%2FzAKZjWKsImCYqUlDUYPZYkLgU061qPsHFESXlJj%2Fyx3VM#rd
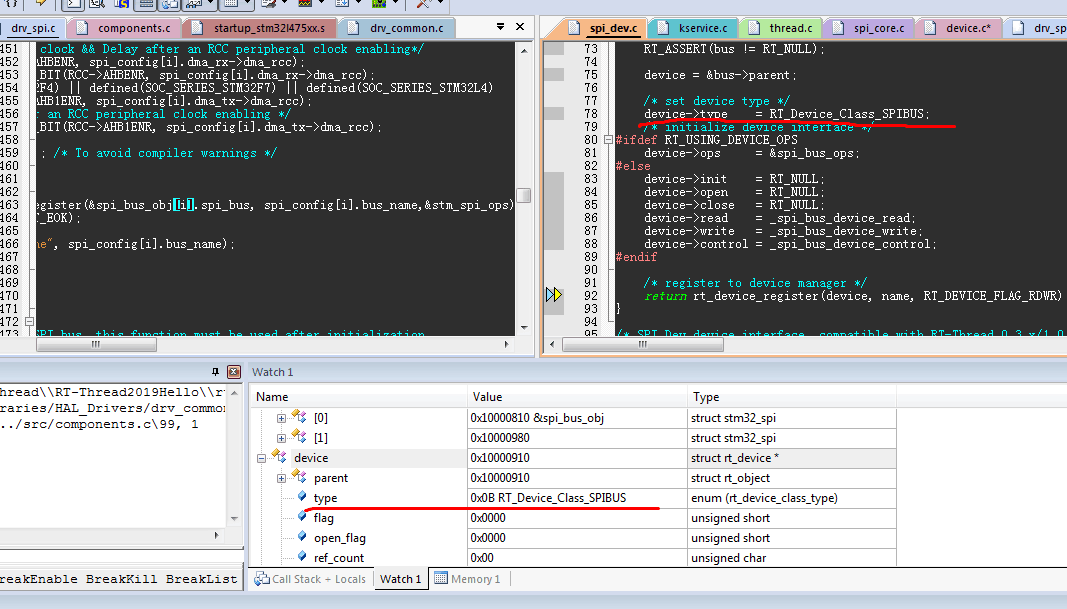
知道了组件自动初始化,我们来看一下这个spi总线初始化的函数干了啥?
static int rt_hw_spi_bus_init(void)
{
rt_err_t result;
for (int i = 0; i < sizeof(spi_config) / sizeof(spi_config[0]); i++)
{
spi_bus_obj[i].config = &spi_config[i]; // 保存用户的配置信息,到单片机外设层面的硬件抽象层。用户在rt_config.h用使用宏开关打开配置信息。
spi_bus_obj[i].spi_bus.parent.user_data = &spi_config[i];
spi_bus_obj[i].handle.Instance = spi_config[i].Instance;
if (spi_bus_obj[i].spi_dma_flag & SPI_USING_RX_DMA_FLAG)
{
/* Configure the DMA handler for Transmission process */
spi_bus_obj[i].dma.handle_rx.Instance = spi_config[i].dma_rx->Instance;
#if defined(SOC_SERIES_STM32L4) || defined(SOC_SERIES_STM32G0)
spi_bus_obj[i].dma.handle_rx.Init.Request = spi_config[i].dma_rx->request;
#endif
spi_bus_obj[i].dma.handle_rx.Init.Direction = DMA_PERIPH_TO_MEMORY;
spi_bus_obj[i].dma.handle_rx.Init.PeriphInc = DMA_PINC_DISABLE;
spi_bus_obj[i].dma.handle_rx.Init.MemInc = DMA_MINC_ENABLE;
。。。
}。。。
}result = rt_spi_bus_register(&spi_bus_obj[i].spi_bus, spi_config[i].bus_name, &stm_spi_ops);
}return result;
}
对于rt_hw_spi_bus_init()函数,上文我们分析了其内部的一个重要部分,如图X所示。
我们再来看其内部的另一个重要部分,即rt_spi_bus_register这个注册函数。
对于rt_spi_bus_register有两条分析路线,
分支一: 最后一个形参,stm_spi_ops ,关注的是这是啥东西,能干嘛。我们要查找stm_spi_ops的定义。
分支二:rt_spi_bus_register函数本身,关注的是他执行了哪些动作。
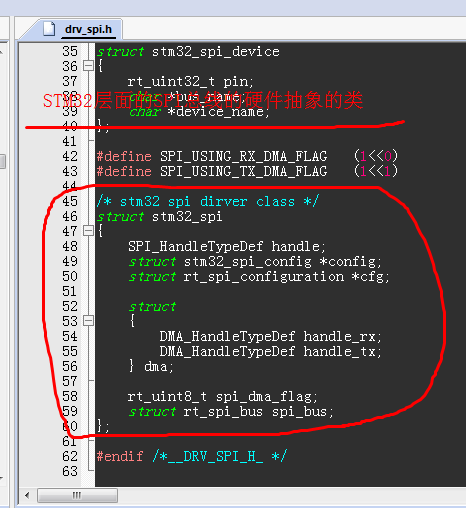 STM32层面的SPI总线的硬件抽象的类
STM32层面的SPI总线的硬件抽象的类
下面,进行分支一的讨论:
static const struct rt_spi_ops stm_spi_ops =
{
.configure = spi_configure,
.xfer = spixfer,
};
static rt_err_t spi_configure (struct rt_spi_device *device, struct rt_spi_configuration *configuration) // 这里的形参们,用品红色来表示
{...
struct stm32_spi *spi_drv = rt_container_of(device->bus, struct stm32_spi, spi_bus); // 找到针对具体硬件SPI总线的抽象出来的类的对象
spi_drv->cfg = configuration;
return stm32_spi_init(spi_drv, configuration); // 将配置信息填入对应该SPI总线的硬件抽象层的类对象
}
static rt_err_t stm32_spi_init(struct stm32_spi *spi_drv, struct rt_spi_configuration *cfg)
{
RT_ASSERT(spi_drv != RT_NULL);
RT_ASSERT(cfg != RT_NULL);
SPI_HandleTypeDef *spi_handle = &spi_drv->handle; // 获取该硬件抽象层的类对象的详细信息
if (cfg->mode & RT_SPI_SLAVE)
{spi_handle->Init.Mode = SPI_MODE_SLAVE;}
else{spi_handle->Init.Mode = SPI_MODE_MASTER;}
if (cfg->mode & RT_SPI_3WIRE)
{spi_handle->Init.Direction = SPI_DIRECTION_1LINE;}
else{spi_handle->Init.Direction = SPI_DIRECTION_2LINES;}
... SPI_DATASIZE_8BIT;
... SPI_DATASIZE_16BIT;
... SPI_PHASE_2EDGE;
... SPI_POLARITY_LOW;
... SPI_NSS_SOFT;
... 省...略...不一一列举...
if (HAL_SPI_Init(spi_handle) != HAL_OK)
// 这里采用其他方法(stm32的HAL库函数),完成了一系列动作:对stm32单片机的底层寄存器的操作配置。达成了最终的目的。
{return RT_EIO;}
if (spi_drv->spi_dma_flag & SPI_USING_TX_DMA_FLAG)
{
HAL_DMA_Init(&spi_drv->dma.handle_tx);
__HAL_LINKDMA(&spi_drv->handle, hdmatx, spi_drv->dma.handle_tx);
/* NVIC configuration for DMA transfer complete interrupt */
HAL_NVIC_SetPriority(spi_drv->config->dma_tx->dma_irq, 0, 1);
HAL_NVIC_EnableIRQ(spi_drv->config->dma_tx->dma_irq);
}
__HAL_SPI_ENABLE(spi_handle); // 使能相应的SPI
//#define __HAL_SPI_ENABLE(__HANDLE__) SET_BIT((__HANDLE__)->Instance->CR1, SPI_CR1_SPE) 这是在操作底层硬件:单片机的底层寄存器
return RT_EOK;
}
通过分支一的讨论,我们知道了,stm_spi_ops具备配置单片机SPIx底层寄存器的全部能力,但是需要我们在外部给入参数,看上文的 品红色 示意处。
下面,进行分支二 rt_spi_bus_register 的讨论:
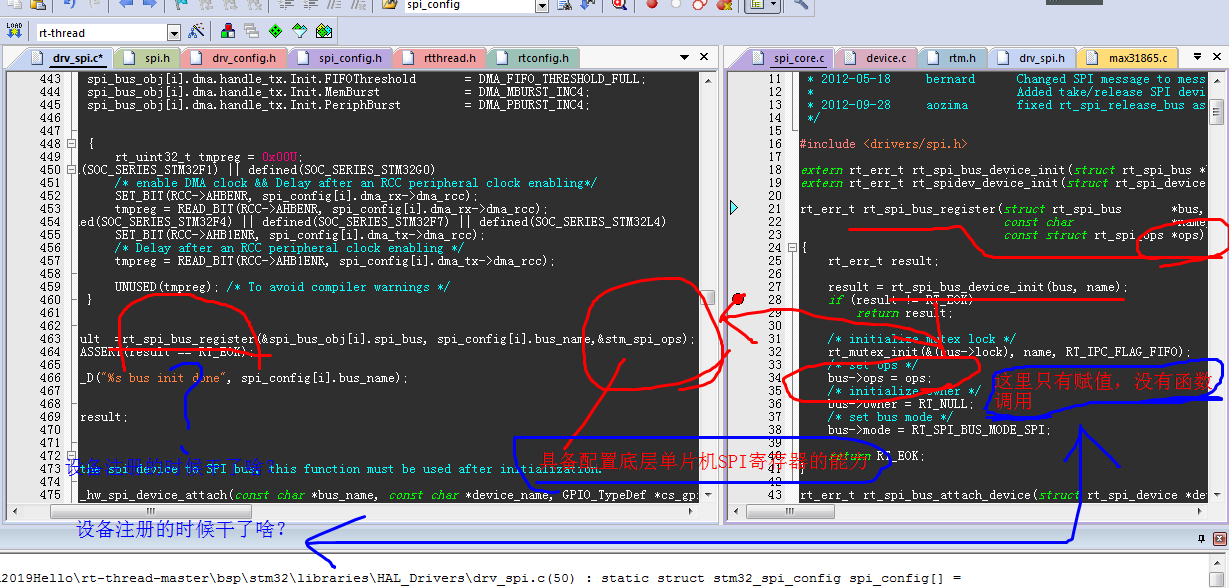
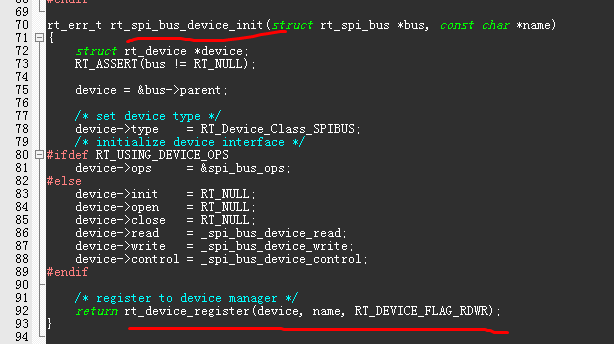
该设备注册函数:
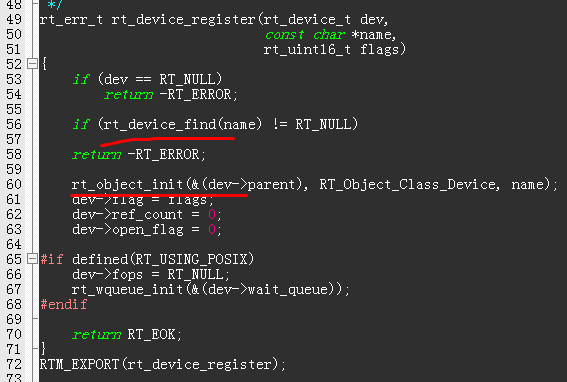
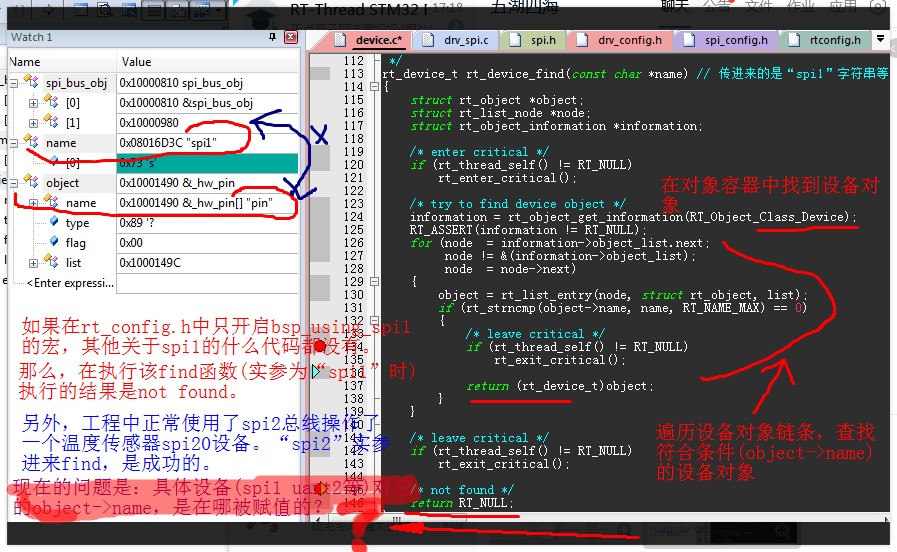
《==== 具体设备对应的object->name,是在哪被赋值的 ______?????_________
需要仿真跟一下,仿真也是有一定技巧和难度的,需要根据设备对象容器内的链表节点查找其他的对象。》
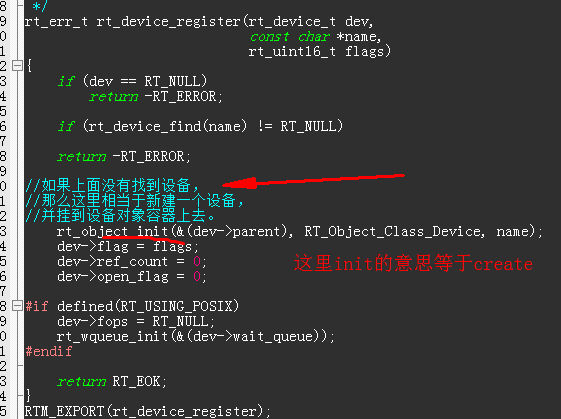 如果找不到,就新建一个设备挂上去。
如果找不到,就新建一个设备挂上去。未完待续。。。
这里面涉及的知识很美,很诱人。有思想,有抽象。
时间限制,有机会以后再接触RTT,再继续完善本文。
RT Thread的SPI设备驱动框架的使用以及内部机制分析的更多相关文章
- 11.4 Android显示系统框架_APP与SurfaceFlinger内部机制分析
4.1 APP跟SurfaceFlinger之间的重要数据结构 一个应用程序有一个或者多个surface(一般只有一个),一个surface有一个或者多个buffer,这些buffer需要应用向sur ...
- Linux设备驱动框架设计
引子 Linux操作系统的一大优势就是支持数以万计的芯片设备,大大小小的芯片厂商工程师都在积极地向Linux kernel提交设备驱动代码.能让这个目标得以实现,这背后隐藏着一个看不见的技术优势:Li ...
- 一步步理解linux字符设备驱动框架(转)
/* *本文版权归于凌阳教育.如转载请注明 *原作者和原文链接 http://blog.csdn.net/edudriver/article/details/18354313* *特此说明并保留对其追 ...
- 宋宝华:Linux设备驱动框架里的设计模式之——模板方法(Template Method)
本文系转载,著作权归作者所有.商业转载请联系作者获得授权,非商业转载请注明出处. 作者: 宋宝华 来源: 微信公众号linux阅码场(id: linuxdev) 前言 <设计模式>这本经典 ...
- Linux内核的LED设备驱动框架【转】
/************************************************************************************ *本文为个人学习记录,如有错 ...
- platform设备驱动框架
驱动框架 通过使用platform设备驱动框架,实现led驱动与设备操作的分离. 我们关注led_drv里面的 struct platform_driver led_drv里面的.probe函 ...
- Linux驱动框架之misc类设备驱动框架
1.何为misc设备 (1)misc中文名就是杂项设备\杂散设备,因为现在的硬件设备多种多样,有好些设备不好对他们进行一个单独的分类,所以就将这些设备全部归属于 杂散设备,也就是misc设备,例如像a ...
- Linux字符设备驱动框架
字符设备是Linux三大设备之一(另外两种是块设备,网络设备),字符设备就是字节流形式通讯的I/O设备,绝大部分设备都是字符设备,常见的字符设备包括鼠标.键盘.显示器.串口等等,当我们执行ls -l ...
- LCD驱动分析(一)字符设备驱动框架分析
参考:S3C2440 LCD驱动(FrameBuffer)实例开发<一> S3C2440 LCD驱动(FrameBuffer)实例开发<二> LCD驱动也是字符设备驱动,也 ...
随机推荐
- SpringBoot中加载XML配置
开篇 在SpringBoot中我们通常都是基于注解来开发的,实话说其实这个功能比较鸡肋,但是,SpringBoot中还是能做到的.所以用不用是一回事,会不会又是另外一回事. 涛锅锅在个人能力能掌握的范 ...
- 特性预览:Apache 顶级项目 Apache Pulsar 2.6.1 版本
在正式分享 2.6.1 版本更新细节之前,冉小龙首先为我们分享了两个相关 PIP 的内容. 一个是 PIP-47 中关于「基于时间来进行版本更新」的计划.该 PIP 提出后,从 2.5.0 版本到目前 ...
- C#还原对图像做的修改
在C#程序中对图像进行处理,有的时候需要将处理后的图像还原,便于观察两者之间的区别,避免重新运行程序造成的麻烦.我是将之前写的Tab页中打开的图像进行还原,将原始图像数据保存在数据流中,然后从数据流中 ...
- docker部署code-server实现在线开发
1.前言 本文记录了通过docker.docker-compose部署code-server.mysql,搭建在线开发环境的过程,综合体验很爽,适合小规模开发团队使用. 安装环境: vmware hy ...
- 转贴:110个Oracle 函数
转载地址:https://bbs.csdn.net/topics/310021870 1. ASCII返回与指定的字符对应的十进制数;SQL> select ascii(A) A,ascii(a ...
- Oracle数据库正则表达式
正则表达式: 无论是在前端还是后台正则表达式都是一个至关重要的知识点,例如判断一个手机号码输入是否正确,如果使用Java.C或者其他语言进行字符串进行判断,也许写几十行代码都不一定能解决,而且漏洞百出 ...
- postman测试接口
一.postman安装 不介绍.可百度搜索.安装完成后如下: 二.postman测试接口 get请求: post请求:请求参数如果是json格式,则如下 上传文件:如果接口中要求上传文件,可如下操作 ...
- Combine 框架,从0到1 —— 4.在 Combine 中使用计时器
本文首发于 Ficow Shen's Blog,原文地址: Combine 框架,从0到1 -- 4.在 Combine 中使用计时器. 内容概览 前言 使用计时器执行周期性的工作 将计时器转换为计时 ...
- 【小程序】---- 封装Echarts公共组件,遍历图表实现多个饼图
一.问题描述: 在小程序的项目中,封装公共的饼图组件,并在需要的页面引入使用.要求一个页面中有多个饼图,动态渲染不同的数据. 二.效果实现: 1. 查看——小程序使用Echarts的方式 2. 封装饼 ...
- Windows docker镜像文件无法删除
最近刚开始玩docker,下载镜像之前没有修改docker的保存路径,因此默认存在了c:\programdata下面,导致C盘空间不足. 之后修改了保存路径之后( docker engin里加&quo ...